
Fターム[3C007KS21]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | マニピュレータの状態 (1,659) | 姿勢、角度、方向 (524) | 関節角度 (352)
Fターム[3C007KS21]に分類される特許
1 - 20 / 352
ロボット制御装置およびキャリブレーション方法
【課題】ロボットの関節軸を動作限界位置でキャリブレーションできない場合においても、限られた空間の中で精度良くキャリブレーションすることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、ロボット本体の関節軸上の任意のキャリブレーション位置に関節軸が移動された場合において、アブソリュートエンコーダから位置情報を取得し、取得した位置情報に含まれる一回転内位置が、多回転位置をカウントする基準となる原点を含まない所定の許容範囲に含まれるか否かを判定する。そして、一回転内位置が、許容範囲に含まれない場合には、一回転内位置が許容範囲に含まれるまで、キャリブレーション位置の移動を要求し、一回転内位置が許容範囲に含まれる場合には、取得した位置情報と関節軸の制御位置とに基づいて、関節軸の位置を補正するための補正値を決定する。
(もっと読む)
ロボット位置検出装置及びロボットシステム

【課題】移動中のロボットから検出される該ロボットの位置に対してその精度を高めることが可能なロボット位置検出装置及びロボットシステムを提供する。
【解決手段】位置算出部60は、トリガー信号が入力されるトリガー信号入力部61と、エンコーダーから出力された位置データが通信時間の分だけ遅れて入力される位置データ入力部62と、入力された位置データを取得してトリガー信号検出時におけるロボットの位置を算出するデータ処理部63とを備えている。データ処理部63は、トリガー信号が検出される前に取得した第1の位置データとそのタイミング、及び、トリガー信号が検出された後の第2の位置データとそのタイミングを用いてロボットの位置を線形補間し、トリガー信号が入力されたタイミングよりも通信時間だけ後の位置をトリガー信号検出時におけるロボットの位置として算出する。
(もっと読む)
ロボットハンドの制御装置
【課題】簡易な構成で硬さの異なる被接触体に対応することができるロボットハンドの制御装置を提供する。
【解決手段】本発明の一形態に係るロボットハンドの制御装置は、指が被接触体に接触した時における関節の状態を推定する接触時関節状態推定器131と、指が被接触体に接触していない時における関節の状態を推定する非接触時関節状態推定器132と、指が被接触体に接触したか否かを判定する接触判定器133と、関節に印加されるトルク外乱を推定するトルク外乱推定器134と、被接触体の剛性を推定する剛性推定器135と、接触判定結果が接触状態の場合、関節の制御剛性を、指が被接触体の押し込み状態を維持できる最小値に演算する制御剛性演算器137と、関節モータ121を制御する制御器138と、を備える。
(もっと読む)
マスタ操作入力装置及びマスタスレーブマニピュレータ
【課題】より故障に強い構成で操作部の位置・姿勢を検出することが可能なマスタ操作入力装置及びそのようなマスタ操作入力装置を備えるマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置の入力部に設けられた把持部の位置・姿勢の指令値を、把持部に取り付けられた関節の駆動量を検出するエンコーダの出力信号に基づいて算出するとともに、撮像センサで得られた画像に基づいて算出する。エンコーダの出力信号に従って算出された指令値と撮像センサで得られた画像に従って算出された指令値との間に所定以上の差がある場合にエラー処理を行う。
(もっと読む)
ロボットシステム、ロボット制御装置およびロボット制御方法
【課題】高精度の位置決めを容易に行うこと。
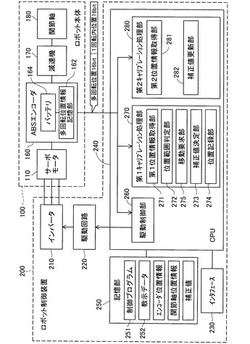
【解決手段】隣接するリンクが関節を介して連結され、関節にモータ11とモータ11の駆動力をリンクに伝達する減速機12とが設けられたロボット2において、モータ11の回転角度を検出する第1の検出部と、減速機12の出力軸の回転角度を検出する第2の検出部とを備える。ロボット制御装置3は、第1の検出部による検出結果および第2の検出部による検出結果に基づいて、モータ11の位置指令を補正し、補正した位置指令Prefを出力する。
(もっと読む)
ロボット、ロボットシステムおよび回転電機
【課題】モータの駆動力をリンクに伝達する減速機の出力軸の回転角度をより精度よく検出すること。
【解決手段】モータ11と、モータ11の駆動力をリンクである下部アーム26bに伝達する減速機12と、減速機12の出力軸125の回転角度を検出するエンコーダ14bとを備える。そして、第2のエンコーダ14bは、減速機12の出力軸125に軸継手140を介して連結される。かかる第2のエンコーダ14bの検出結果に基づいてモータ11の位置指令が補正される。
(もっと読む)
ロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法
【課題】ロボットが有する駆動源の駆動量と実際のロボットの状態とを画像に基づいて対応付ける処理の効率を高めることの可能なロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法を提供する。
【解決手段】
水平多関節ロボット10(ロボット10)用位置検出装置は、撮像対象であるロボット10又はワークWを撮像するカメラ22と、撮像対象の位置を画像から算出する制御部33と、ロボット10の第1及び第2モーター11a,13aの駆動量を取得するI/O31と、撮像対象の算出位置と駆動量とを対応付けて記憶する。上記カメラ22及びI/O31には、撮像対象の位置を検出するための共通するトリガー信号が入力される。カメラ22は、トリガー信号の入力によって撮像対象の撮像を開始する一方、I/O31では、同トリガー信号の入力によって制御部33が駆動量を得る。
(もっと読む)
軌道計画方法、軌道制御方法、軌道計画システム及び軌道計画・制御システム
【課題】物体の種々の初期状態から目標状態までの軌道を、探索に制約を伴わずに少ない計算コストで求めることのできる軌道計画システム、及び求めた軌道にしたがって目標状態までの軌道を制御することのできる軌道計画・制御システムを提供する。
【解決手段】軌道計画システムは、状態空間において、該目標状態を根とし、該目標状態に至るまでの状態を枝として、予め区分された状態空間の複数のセルのそれぞれに一つの枝を有する探索木を予め作成する探索木作成部(101)と、該探索木を記憶する探索木記憶部(103)と、該物体の現在の状態を求め、該現在の状態に対応する該探索木の枝を求め、該現在の状態に対応する該探索木の枝から該根までの探索木上の経路を、物体の軌道として求める軌道作成部(105)と、を備える。軌道計画・制御システムは、さらに目標状態までの軌道を制御する軌道制御部(107)を備える。
(もっと読む)
ロボット及びロボットのノイズ除去方法
【課題】慣性センサーを用いたフィードバック系において、発振してしないロボットを提供する。
【解決手段】アーム101と、アームを回動させるモーター103とトルク伝達機構102とを含むアーム連結部104と、アーム101の端部のアーム連結部104に連結された基体105と、モーター103の回動角度を検出しモーター103の回動角度情報を出力する角度センサー106と、アーム101に作用する慣性力の情報を出力する慣性センサー107と、アーム101の回動動作を制御する制御部108と、角度センサー106の出力と慣性センサー107の出力とから慣性センサー107のノイズ周波数を検出するノイズ検出部109と、ノイズ検出部109の情報からフィルター111の特性を決めるフィルター定数決定部110と、フィルター定数決定部110に基づき慣性センサー107のノイズを除去するフィルター111とを備える。
(もっと読む)
関節駆動装置
【課題】人工筋肉アクチュエータを動力源とする筋骨格型ロボット等の関節駆動装置において、装置全体を大型化することなく、可動範囲の広範化及び所定の可動範囲での高出力化が可能な関節駆動装置を提供すること。
【解決手段】支持軸32に回転自在に支持されるプーリ4と、支持軸32に回動自在に支持されるリンク部6と、第1人工筋肉2a及び第2人工筋肉2bを有し、第1人工筋肉2a及び第2人工筋肉2bの拮抗筋運動による収縮量の差により、プーリ4を回転させる人工筋肉アクチュエータ2と、を備えた関節駆動装置1において、リンク部6の回転角度を検出する原点センサと、リンク部6をプーリ4に接続させて、回転駆動力を伝達する接続クラッチ7と、を備え、人工筋肉アクチュエータ2により所定の回転角度に回転されたプーリ4と所定の回動位置に位置するリンク部6とを接続して、リンク部6のプーリに対する相対的な回動範囲を切り替える。
(もっと読む)
ロボットハンドの挟み込み軽減機構及びロボットハンド
【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
剛性を有する複数の弾性ワイヤーを用いたパラレルメカニズム
【課題】従来のパラレルメカニズム等の多自由度機構は、一般的に構造が複雑で、柔軟性も低い。
【解決手段】本発明のパラレルメカニズムは、剛性を有する複数の弾性ワイヤーを合理的に用いて構成することにより、従来のパラレルメカニズムでは不可能であった柔軟な動きを行えるようにした多自由度機構を提供するものであり、即ち、剛性を有し、円形断面で単線の弾性ワイヤー1の複数本が、被駆動側部材2と駆動側部材3の各支点位置において同一配置となるように接続されており、また被駆動側部材と駆動側部材間には弾性ワイヤーを、横断面方向から見た配置を維持しつつ、軸方向に移動及び軸方向の回りに回転可能に支持する中間支持部材4が設けられているパラレルメカニズムである。
(もっと読む)
制御装置、ロボット、制御方法、ならびに、プログラム
【課題】複数の関節を有する制御対象の表面に対するユーザの操作によって制御対象の形状を適切に変化させる制御装置等を提供する。
【解決手段】制御装置101において、回転角取得部102は、操作対象が有する棒状体の関節の回転角qを取得する。接触角取得部103は、棒状体の周囲に設置された接触位置センサの出力から接触角sを取得する。和計算部104は、回転角qと接触角sの和(q+s)を計算する。出力部105は、和(q+s)がいずれの角度範囲に属するか、に応じて、棒状体の関節の屈曲角や振上角を増減させる制御信号を出力する。
(もっと読む)
ロボット装置
【課題】2つのリンクの長さが異なっても、迅速にスティフネス特性を示す楕円を求める。
【解決手段】記憶部4には、第1の剛性指令値U1を求める第1の演算式、第2の剛性指令値U2を求める第2の演算式及び第3の剛性指令値U3を求める第3の演算式が記憶されている。各演算式は、スティフネス楕円の短軸及び長軸のうちの一方の軸が、直交座標系のx軸に平行となる条件での連立方程式を各剛性指令値について解くことにより導き出したものである。減算部3は、第1の揺動角度の値θ1*から目標標傾斜角度の値φ*を減算した値を新たな第1の揺動角度値θ1*’としている。そして、演算部2は、各演算式に、各値を代入する際に、第1の揺動角度値θ1*’を代入して、スティフネス楕円の軸が目標標傾斜角度の値φ*傾いた各剛性指令値U1,U2,U3を求める。
(もっと読む)
多自由度位置決め装置および多自由度位置決め方法
【課題】簡易な構成で、エンドプレートおよびツールや治具の重量を支えることができ、また、駆動電流による発熱を抑制し、作業を行う際の駆動力を確保する。
【解決手段】ベースプレート2とエンドプレート4との間に接続された複数のリンク3と、各リンク3に取り付けられ、リンク3を駆動させるアクチュエータ6と、ベースプレート2とエンドプレート4との間に接続され、定常位置でのエンドプレート4およびエンドプレート4に取り付けられた物体の重量を支える重力補償装置5とを備えた。
(もっと読む)
装着型動作支援装置
【課題】動作時に身体の装着部に対するずれ動きを最小限に抑えるようにする。
【解決手段】装着型動作支援装置SUは、肘関節A3を挟む上腕部A1に装着される第1サポート部材10と、前腕部A2に装着されると共に第1サポート部材10に連結され、肘関節A3の屈曲動作に合わせて姿勢変位可能な第2サポート部材12とを備える。第2サポート部材12は、前腕部A2に装着される前腕装着部45を備え、この前腕装着部45は、前腕部A2の最も細い部位である関節骨格部位A7に保持される保持部51を備える。また前腕装着部45は、肘関節A3から手首関節A4に近づくにつれて捻れた形状に形成され、前腕部A2を包み込むように装着される。前腕装着部45の前腕部A2に臨む内側面にノンスリップ加工が施されており、前腕部A2に対して前腕装着部45が滑り難くなっている。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
ロボットシステム
【課題】ロボットの運転に際し、制御ユニット側からロボット側のエンコーダに対して適正な駆動電源を供給し、ひいてはエンコーダの検出性能を確保する。
【解決手段】ロボット10は、複数のモータ21〜26と複数のエンコーダ21a〜26aとを備えている。ロボット10と制御ユニット30とは電気ケーブル40を介して接続されており、それにはエンコーダ駆動電源を供給する電源ケーブル42が含まれている。制御ユニット30は、コントローラ31と電源回路32とを備えており、コントローラ31は、電源回路32で生成される電源電圧を、エンコーダ駆動に適した適合電源電圧に調整する。このとき、コントローラ31は、電源電圧を複数の段階で変更しながら設定し、電源電圧が設定された状態で、各エンコーダ21a〜26aの通信状況の良否を判定する。そして、通信状況が良好であると判定された時の電源電圧に基づいて、適合電源電圧を算出する。
(もっと読む)
歩行支援装置
【課題】ユーザがイメージする歩行動作とうまく同期して脚装具を揺動することができる歩行支援装置を提供する。
【解決手段】歩行支援装置は、脚装具とアクチュエータとコントローラを備える。脚装具は、ユーザの大腿と下腿に夫々装着される大腿リンクと下腿リンクが回転ジョイントによって揺動可能に連結されている機構を有する。アクチュエータは、回転ジョイントの回転軸周りに下腿リンクを揺動させる。コントローラは、下腿リンクの揺動角が、遊脚膝角度の一歩分の経時的変化を記述した目標パターンに追従するようにアクチュエータを制御する。コントローラは、脚装具を装着した脚の足の腰位置に対する前後方向相対位置が、腰位置よりも第1距離閾値以上前方に移動した後に、腰位置よりも第2距離閾値以上後方に移動したことを条件として、前記目標パターンへの追従制御を開始する。
(もっと読む)
ロボットシステム及びロボット制御装置
【課題】ロボットアームと周囲の対象物との接触等で生じる外力を低減することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】ロボットアーム2と、ロボットアーム2に設けられロボットアーム2を駆動させる1以上のアクチュエータ41A〜47Aと、ロボットアーム2とアクチュエータ41A〜47Aとの少なくともいずれかにかかる外力を検出するセンサ部4と、アクチュエータ41A〜47Aの動作を制御するとともに、センサ部4の検出結果に基づいてアクチュエータ41A〜47Aへのトルク指令値を制限するコントローラ3と、を有して構成する。
(もっと読む)
1 - 20 / 352
[ Back to top ]