
Fターム[3C007KS22]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | マニピュレータの状態 (1,659) | 速度 (249)
Fターム[3C007KS22]の下位に属するFターム
Fターム[3C007KS22]に分類される特許
41 - 51 / 51
ロボットの制御装置
回転可能なアーム15と、アーム15を駆動するモータ11と、モータ11の回転位置を検出して位置検出信号を発生する位置検出器12と、アーム15の回転を規制するストッパー23と、モータ11の回転を拘束及び開放するブレーキ13と、モータ11を駆動するサーボ制御部33と、サーボ制御部33を無効にする共に、ブレーキ13を開放する解除操作スイッチ42と、解除操作スイッチ42の動作によりストッパー23とアーム15との角度に応じてブレーキ13を拘束又は開放の時間を変更するブレーキ制御部37と、を備えたものである。  (もっと読む)
(もっと読む)
ネットワーク基盤のロボット制御システム及びネットワーク基盤のロボット制御システムにおけるロボット速度の制御方法
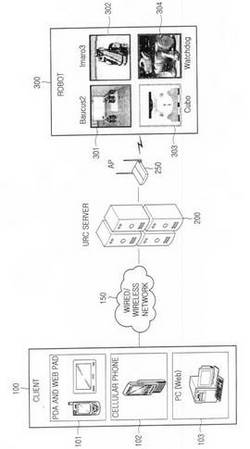
【課題】ネットワーク基盤のロボット制御システム及びネットワーク基盤のロボット制御システムにおけるロボット速度の制御方法を提供すること。
【解決手段】クライアントが上記ロボットにより撮影された映像データフレームの受信状態に応じてロボットの制御速度を計算し、計算されたロボットの制御速度を含むロボット制御メッセージを生成してロボットに送ることで、ロボットに、ロボット制御メッセージに含まれているロボット制御速度に応じて速度を変更させる。これにより、クライアントの映像データの受信状態に応じてロボットの速度を制御することから、ユーザーにクライアントの性能とは無関係に円滑にロボットの制御を行わせる。
(もっと読む)
可動軸駆動装置

【課題】脚式歩行ロボット等のロボットに用いた場合に、そのロボットの総重量や大きさを増加させることなく、関節としての可動軸に配される駆動モータのエネルギ効率を向上させることにある。
【解決手段】互いに隣接する二つのリンクを1自由度で相対運動させる可動軸を駆動する装置において、互いに異なる最高出力の二台のモータ11,12およびそれらのモータで駆動されて各々前記可動軸を駆動する互いに異なる減速比の二台の減速機14,15と、前記可動軸の必要駆動トルクと回転数とに応じてエネルギ効率が最高になるようにトルク分配値を演算するマイクロコンピュータ19と、前記演算したトルク分配値に応じて前記各モータ11,12を駆動する電流制御ドライバ17,18とを具えてなる、可動軸駆動装置である。
(もっと読む)
粒子の衝突回避の予約方法および装置
【課題】従来の衝突回避方法には、▲1▼衝突判断や評価方法が曖昧、▲2▼対象を単独または少数に限って個別に扱うため多数の対象と同時に衝突回避できない、▲3▼側方や後方、障害物の陰、上下から接近する対象を無視している、▲4▼相手の速度や重量など、物理的情報を想定または無視しているなどの問題がある。また、▲5▼操縦者に警告するのみで過大な責任を求めたり、逆に、操縦感覚と無関係に自動減速・停止するなど、操縦者の存在が軽視されている。
【解決手段】車両などと対象を粒子群で表し、運動状態に比例して安全に制動および回転可能な3次元的な空間を粒子に与え、この空間と相手粒子との仮想衝突計算を3次元仮想空間で行い、仮想衝突反力を自らにのみ加えて制動および回転行動を取るよう粒子運動を制御する方法と、制御信号を制御系と操縦系に与える中間力覚制御により、機械系と操縦者の双方を制御しながら常時・動的に衝突を回避するシステム。
(もっと読む)
ロボット制御装置
【課題】計算量を削減し、高精度な衝突判定と過度な反転動作判断を行うロボット制御装置を提供すること。
【解決手段】位置指令、速度指令、加速度指令の少なくとも1つから演算した必要駆動トルク指令要素と各関節を駆動するモータの位置、速度、加速度の少なくとも1つから、改めてロボットの運動方程式を全て再度計算することなしに必要駆動トルクを演算し、演算した必要駆動トルクと各関節を駆動するモータの電流を比較することにより衝突の判別を行う。また、衝突判定時の位置・速度を記憶し、現在の位置・速度と比較し、過度な反転動作と判定された場合にはロボットを緊急停止させる。
(もっと読む)
操作装置と、操作子の動作調節方法と、そのためのプログラム
【課題】操作子に適度な操作反力を再現する汎用性の高い技術を提供する。
【解決手段】操作装置は、操作子と、操作力を検出する操作力検出手段と、操作子の速度を検出する速度検出手段と、検出した操作子の速度に、検出した操作力に起因する加速度と単位時間から計算される速度変化量を加味することによって、第1速度を算出する第1速度算出手段と、算出した第1速度と反対向きの反対力を設定する反対力設定手段と、算出した第1速度に、設定した反対力に起因する加速度と単位時間から計算される速度変化量を加味することによって、第2速度を算出する第2速度算出手段と、操作子の速度を算出した第2速度に調節するアクチュエータとを備えている。反対力設定手段は、算出した第1速度が所定速度以下のときに、第1速度を単位時間でゼロに減じる加速度から計算する力を、反対力に設定することを特徴とする。
(もっと読む)
三次元入力装置
【課題】本発明は、手に装着した装着部材に三次元検出型のセンサを設け、手の動作に応じた三次元位置データを取得して高精度の三次元入力を行うことを目的とする。
【解決手段】本発明による三次元入力装置は、手に装着するための装着部材(100)と、前記装着部材(100)に設けられ三次元位置を測定できるセンサ(105)とからなり、前記センサ(105)からの三次元位置データ(300)を得る構成である。
(もっと読む)
超柔軟身体を有するロボットシステム
【課題】使いやすい感覚系(センサ系)を備えた,無限次元の運動学的自由度を有する柔軟な身体をもつロボットシステムとその制御方法を提供する.
【解決手段】無限次元の運動学的自由度を有する身体と,上記身体に力を印加することのできるアクチュエータと,上記身体の特徴量を検出する内界センサと,上記センサからの情報から適切な制御入力を計算しアクチュエータに指令するコントローラと,から構成されるロボットシステムを構築する.
感覚系(センサ系)をうまく選択することで,超駆動系,超劣観測系でありながら,所望の作業を内界センサの情報のみで達成できる.
(もっと読む)
移動ロボットの歩容生成装置
移動ロボット1の生成しようとする歩容を規定する歩容パラメータを決定するとき、歩容パラメータの優先パラメータの値を所定のベース歩容パラメータの優先歩容パラメータの値から、本来の要求値に一致するまで段階的に該要求値に近づけるように更新する。その更新の都度、優先パラメータ以外の非優先パラメータのうちの探索対象パラメータをロボット1の動力学モデル上で歩容の境界条件を満足し得るように探索的に決定し、その決定した探索対象パラメータと更新後の優先パラメータとを含む歩容パラメータを新たに決定する。最終的に優先パラメータを要求値に一致させるときに新たに決定した歩容パラメータと動力学モデルとを用いて移動ロボット1の歩容を生成する。 (もっと読む)
移動ロボットの歩容生成装置
n個の動力学モデルを備え、第1動力学モデル上で歩容の境界条件を満たすように、目標歩容を規定する第1歩容パラメータが決定される。第1歩容パラメータは、第1動力学モデル以外の各動力学モデルである第m動力学モデル(m:2≦m≦nを満たす整数)を用いて段階的に修正され、第m動力学モデル上で境界条件を満たす第m歩容パラメータが決定される。第m歩容パラメータは、第m−1歩容パラメータを用いて第m動力学モデル上で生成される歩容の、境界条件からのずれ度合いに応じて第m−1歩容パラメータの修正対象を修正することで決定される。最終的に決定した第n歩容パラメータと第n動力学モデルとを用いて目標歩容を生成する。 (もっと読む)
システム、コンピュータプログラム、データ信号、及びGUIを含むマシンの制御方法
本発明は、アイテムを第1ポジションからピックアップして第2ポジションにプレースする、ロボット10、11、12又はピックアンドプレースマシンのような複数のマシンから成るグループを制御する方法を開示する。センサ7からの第1ポジション3に関する情報は制御手段40に提供され、この制御手段は、メッセージをマスタープロセスから全てのマシンに送信する。メッセージは全ての第1ポジションのリストを含む。これらのマシンは、これらの第1ポジションの各々を動的且つ適応的にハンドリングし、各第1ポジションがハンドリングされるときマスタープロセスに通知を行なう。今度はマスタープロセスが全てのマシンに、所与の第1ポジションがハンドリングされたことを通知する。システム、コンピュータプログラム、及びグラフィカルユーザインターフェースも開示される。  (もっと読む)
(もっと読む)
41 - 51 / 51
[ Back to top ]