
Fターム[3C007KS23]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | マニピュレータの状態 (1,659) | 速度 (249) | 加速度 (102)
Fターム[3C007KS23]に分類される特許
1 - 20 / 102
脚式ロボット、その制御方法、及び制御プログラム
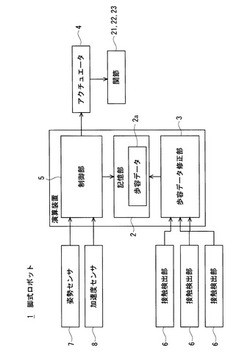
【課題】不整地路面に足部を確実に着地させること。
【解決手段】脚式ロボット1は、胴体10と、胴体10に連結された脚部20と、脚部20の下端に設けられた足部26と、歩容データ2aを記憶する記憶手段と、記憶手段に記憶された歩容データ2aに基づいて、脚部20の関節を駆動制御する制御手段と、足部26の足裏と路面との接触を検出する接触検出手段と、接触検出手段により検出された足部26の足裏と路面との接触位置を中心にして、足部26をロール軸及び/又はピッチ軸周りに回転させ、足部26の足裏の他の部分を路面に接地させるように歩容データ2aを修正する歩容データ修正手段と、を備える。
(もっと読む)
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法

【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
マスタ操作入力装置及びマスタスレーブマニピュレータ
【課題】より故障に強い構成で操作部の位置・姿勢を検出することが可能なマスタ操作入力装置及びそのようなマスタ操作入力装置を備えるマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置の入力部に設けられた把持部の位置・姿勢の指令値を、把持部に取り付けられた関節の駆動量を検出するエンコーダの出力信号に基づいて算出するとともに、撮像センサで得られた画像に基づいて算出する。エンコーダの出力信号に従って算出された指令値と撮像センサで得られた画像に従って算出された指令値との間に所定以上の差がある場合にエラー処理を行う。
(もっと読む)
ロボット
【課題】ロボットアームの機械部品の異常の有無を精度良く検出すること。
【解決手段】ロボット100は、アクチュエータAc2〜Ac15を有するアーム103L,103Rと、アーム103L,103Rの筐体の先端近傍に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ130と、センサ130の近傍に設けられ、センサ130の出力信号をデジタル信号に変換するA/D変換器とを有している。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
産業用ロボットの速度位置解析システム及び産業用ロボットの速度位置検出装置
【課題】従来の産業用ロボットの速度位置解析システムは、ドリフト安定度の高い慣性センサからの慣性信号に基づいて産業用ロボットの位置等を検出するように構成しているので、高価な慣性センサが必要となり、部品コストの増大の要因になっている。
【解決手段】本発明による産業用ロボットの速度位置解析システムでは、移動制御部20は、産業用ロボット1を静止させているときにデータ蓄積部30に対して静止情報20aを入力する。データ蓄積部30は、静止情報20aを検出したときの慣性信号11aのデータに関連付けて静止情報20aを記憶する。速度位置後解析部31は、静止情報20aが関連付けられている慣性信号11aのデータに基づいて求められる産業用ロボット1の速度をゼロとする補正値を求めて、求めた補正値を用いて慣性信号11aのデータを補正して産業用ロボット1の速度及び位置を求める。
(もっと読む)
ロボットの制御装置
【課題】ロボットをより高速で動作させるための制御パターンを取得する制御装置において、その実用性を向上させる。
【解決手段】制御装置20は、ロボットのアームを第1姿勢と第2姿勢との間で駆動して、各サーボモータ31において速度、加速度、及び供給される電流の各連続値を検出する。各モータ31において所定の期間毎に、上限値に対する電流値の比率である電流比を算出する。所定の期間毎に、各モータ31の電流比のうち最大電流比を選択し、この最大電流比の逆数に基づいて各モータ31の修正加速度を算出する。修正加速度と各モータ31の速度とに基づいて、各モータ31における修正速度を繰り返し算出する。修正速度と各モータ31の回転位置とに基づいて、各モータ31における修正回転位置を繰り返し算出する。第1姿勢側から算出された修正速度と、第2姿勢側から算出された修正速度とに基づいて、修正後の速度変動パターンを設定する。
(もっと読む)
ロボット制御システム
【課題】スマートフォン等の携帯情報端末を利用して遠隔制御を行うロボットを制御するロボット制御システムを提供することを課題とする。
【解決手段】制御システム1は、ロボット2と、無線通信回線31と接続可能な携帯情報端末3と、ロボット2を制御する制御情報8を送出する遠隔制御端末7とを具備する。ロボット2は、携帯情報端末3を着脱自在に装着可能な頭部9及び胴体部10からなるロボット本体11と、ロボット本体11の下方に取設され、一対の走行車輪21a,21bを有する倒立二輪機構を採用した走行機構部5と、遠隔制御端末7から送出された制御情報8を携帯情報端末3を通じて受付け、ロボット2の動作制御及び走行制御を行うロボット制御部12とを具備して主に構成されている。
(もっと読む)
ロボット装置およびロボット装置の制御方法
【課題】実作動時において基準となるセンサー検出データと比較し、その検出データの差分から確実な故障判断を行うロボット装置および制御方法を提供する。
【解決手段】アクチュエーターを含む連結装置によりアームが回転もしくは直線移動可能に連結されたロボット装置であって、アームに取り付けられた慣性センサーと、アクチュエーターに備える角度センサーからの回転角度データから、アクチュエーターの角速度および角加速度を演算する第1演算部と、慣性センサーにより検出された出力より、アームの角速度または角加速度を演算する第2演算部と、第1演算部により演算された角速度または角加速度と、第2演算部により演算された角速度または角加速度とを比較する比較部と、比較部においてアクチュエーターとアームの角速度または角加速度との差の絶対値が、閾値より大きい場合に慣性センサーが故障と判定する。
(もっと読む)
マニピュレータ及びマニピュレータの制御方法
【課題】本発明は、小型な駆動部を有するマニピュレータを、または複数の構造物が存在する狭隘部へマニピュレータを挿入にできるマニピュレータの制御方法を提供することである。
【解決手段】本発明は、上記目的を達成するために、少なくとも一つの駆動部と、前記駆動部に接続する少なくとも一つのリンクとを備えるマニピュレータの前記駆動部の姿勢角を検出し、前記姿勢角から前記マニピュレータの手先の位置および姿勢を算出するマニピュレータまたはマニピュレータの制御方法において、前記姿勢角の検出は前記リンクの駆動軸またはその延長線が前記姿勢検出器の検出軸とが一致するように設けられた前記姿勢検出器によって行なうことを第1の特徴とする。
(もっと読む)
支持装置および支持方法ならびに搬送装置および搬送方法
【課題】支持姿勢や搬送動作にかかわらず板状部材の撓みを抑制できる支持装置および支持方法ならびに搬送装置および搬送方法を提供すること。
【解決手段】接着シートMSが貼付された板状部材Wの搬送装置1は、接着シートMSを介して板状部材Wを保持する保持手段2と、保持手段2で保持された板状部材Wを付勢して板状部材Wの面位置を所定位置に維持する面位置維持手段6と、保持手段2を移動させる移動手段3とを備え、面位置維持手段6は、板状部材Wを一方側に付勢するかまたは他方側に付勢することで、板状部材Wの支持姿勢や搬送動作にかかわらず板状部材Wの面位置を維持することができる。
(もっと読む)
ロボットシステム
【課題】センサ故障時のロボットの異常動作を防止する。
【解決手段】サーボモータ15の回転量を検出する第1の検出手段16と、ロボットアーム先端部に取り付けられ、ロボットアーム先端部の加速度aを検出する第2の検出手段17と、第1の検出手段16による検出値に基づきロボットアーム先端部の加速度a1を演算するとともに、この演算された加速度a1と、検出された加速度aとの偏差を演算する演算手段21と、演算手段21により演算された偏差の大きさが基準値αより大きいときに、サーボモータ15を非常停止する非常停止手段21〜23とを備える。
(もっと読む)
2足歩行ロボット及びその制御方法
【課題】外乱の作用時に、ハードウェアや環境の制約に則った適切な遊脚の着地位置を設定する。
【解決手段】外乱作用時の遊脚の着地位置の決定に際して、電子制御ユニット1は、ハードウェアの制約により決定される遊脚の着地可能域を第1の着地可能域として算出するとともに、環境の制約により決定される遊脚の着地可能域を第2の着地可能域として算出する。そして電子制御ユニット1は、第1及び第2の着地可能域のAND領域を抽出し、その抽出したAND領域を、外乱が作用したときの遊脚の着地可能域として演算する。
(もっと読む)
2脚歩行ロボット
【課題】路面に対して足平が予定外に傾いた際に、歩行安定性を確保しつつ足平の傾きを抑える2脚歩行ロボットを実現する。
【解決手段】2脚歩行ロボットは、足平から路面までの距離を計測する距離センサを備えている。各脚関節を制御するコントローラは、次の処理を実行する。重心加速度算出ステップ:距離センサによって予定外に足平が路面に対して傾いたことを検知したときに、そのときの重心の加速度を算出する、重心軌道決定ステップ:算出した重心の加速度を初期値とし、所定期間の終端で予め定められた速度を有することを終端条件としてZMP方程式を解いて重心の軌道を算出する、及び、関節目標角算出ステップ:算出された重心の軌道から脚関節の目標角の時系列データを算出する。そしてコントローラは、関節目標角算出ステップで算出された目標角の時系列データに追従するように各脚関節を制御する。
(もっと読む)
学習制御機能を備えたロボット
【課題】大部分の現場において、学習制御器の調整は経験に基づいて試行錯誤で行われており、調整が難しいという問題があった。
【解決手段】本発明のロボットは、位置制御の対象とする部位にセンサを備えたロボット機構部と、ロボット機構部の動作を制御する制御装置とを含むロボットであって、制御装置は、ロボット機構部の動作を制御する通常制御部と、作業プログラムによりロボット機構部を動作させて、センサによって検出した前記ロボット機構部の制御対象位置を通常制御部に与えられた目標軌跡もしくは位置に近づけるために学習補正量を算出する学習を行う学習制御部と、を有し、学習制御部は、学習稼動状態で設定可能な最大速度オーバライドを算出し、最大速度オーバライドに至るまで複数回に渡って速度オーバライドを増加させながら学習補正量を算出する学習を行うことを特徴とする。
(もっと読む)
無線伝送装置とそれを用いたロボットの振動抑制制御装置およびロボット制御装置
【課題】無線化した加速度センサをロボットに取り付ける場合、センサを用いた振動抑制の効果を向上できるとともにセンサ基板における消費電力が低減できるようにする。
【解決手段】センサ信号の主成分の振動パラメータ(周波数、振幅、位相)を得る信号解析装置と、該パラメータからセンサ信号の近似波形を生成する信号発生器81を備えて、該パラメータが変更された場合のみパラメータの無線伝送を行う。得られる近似波形から各軸モータの速度を求め、シミュレーションによりロボット動作に基づくモータ速度を得て、モータ速度の差をモータ速度の振動成分とする。モータ速度の振動成分をモータの位置−速度制御ループにフィードバックしてロボットアームに発生する振動を抑制する。
(もっと読む)
ロボットの制振方法およびロボットの制御装置
【課題】ロボットの先端の振動を抑制する。
【解決手段】複数のリンク24〜34と対応するリンクを駆動する複数のモータ36〜46とを有するロボットの動作が停止するときに発生するロボット先端の振動を抑制するロボットの制振方法であって、ロボット先端の加速度を加速度センサ52によって検出し、加速度センサが検出した加速度に基づいてロボット先端の速度を算出する。ロボット先端の速度と、加速度センサの加速度検出タイミングにおける複数のモータの回転角度と、ヤコビ行列Jの逆行列J−1とに基づいて、各リンクと対応するモータとの間のねじれ角速度を算出する。さらに、ねじれ角速度に基づいてねじれ角度を算出し、ねじれ角速度とねじれ角度とに基づいて、各リンクと対応するモータとの間に発生したねじれが解消する、各モータの制御入力に加算する補償量を算出し、補償量を加算した制御入力を各モータに出力する。
(もっと読む)
ロボット装置、ロボット装置の行動制御方法及びプログラム
【課題】 学習対象物の共有(共同注意)を可能として、適切に学習対象物を特定することを可能にする。
【解決手段】 ロボット装置は、学習対象物を特定する学習対象物特定手段として機能するセグメンテーション処理部132及び学習対象物検出部133が特定した学習対象物の情報を連想想起記憶部に記憶し、行動制御部により、新たな検出した物と連想想起記憶部に記憶した学習対象物の情報とに基づいて行動をする。
(もっと読む)
移動体装置
【課題】操作者の操作意図を適切に推定し、ロボットを移動する。
【解決手段】ZMP検出手段22が、接地面(走行面)に沿って移動するロボットのZMPの位置を検出し、操作意図推定手段44が、ZMP検出手段22により検出される、操作者からロボットに対して加えられた力により移動したZMPの位置に基づいて、操作意図を推定し、移動手段42が、操作意図推定手段44により推定された操作意図に基づいてロボットを移動させる。
(もっと読む)
1 - 20 / 102
[ Back to top ]