
Fターム[3C007KT04]の内容
マニピュレータ、ロボット (46,145) | 視覚装置、画像化装置 (2,194) | カメラの配置又は取付 (702)
Fターム[3C007KT04]の下位に属するFターム
腕又は手に設けたもの (291)
マニピュレータ以外に設けたもの (306)
Fターム[3C007KT04]に分類される特許
1 - 20 / 105
ロボットシステム
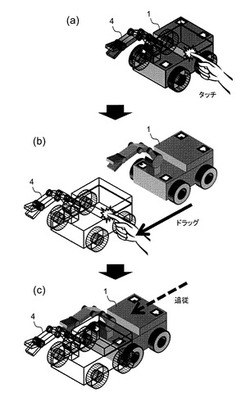
【課題】少ない時間で操作を習得することができる、直感的なロボットの遠隔操作インタフェースを提供する。
【解決手段】ロボットの操作装置が、カメラから取り込まれたカメラ映像が表示されるタッチスクリーンと、カメラ映像からロボットの3次元的な位置及び姿勢を認識するロボット認識部と、ロボット認識部で認識した位置及び姿勢とからロボットのCG映像を生成し、CG映像をタッチスクリーン上のロボットのカメラ映像に重畳表示するCG合成部と、ユーザのタッチ操作に応じて、タッチスクリーン上でCG映像のロボットを仮想的に動作させる操作入力部と、CG映像のロボットの仮想的な動作に追従してロボットが動作するように、ロボットに対して制御命令を送出するロボット制御部と、を有している。
(もっと読む)
カメラシステムおよびその制御方法

【課題】高操作性を確保しつつ、ミスコミュニケーションの発生を軽減することができないという問題を解決することが可能なカメラシステムを提供する。
【解決手段】画像処理部16は、カメラ11で撮像された撮像画像に対して、その撮像画像内の所定領域を加工する画像処理を行って、加工画像を生成する。表示部は、加工画像を表示する。操作部は、カメラの向きを示す操作コマンドを受け付ける。モータ制御部18は、操作コマンドに応じてカメラ11の向きを調整する。
(もっと読む)
ロボットシステムおよびそれに用いる空間陣形認識装置
【構成】 ロボットシステム100は、ロボット10およびモーションキャプチャシステム12を含む。ロボットシステム100では、ロボット10および人の位置、体の向きおよび視線方向を用いてロボット10と人との空間陣形を分析し、ロボット10および人の対話参加状態を認識する。そして、認識した対話参加状態に応じて、ロボット10が適宜の行動を取ることによって、ロボット10および人の双方が対話参加状態になるようにした後、ロボット10が人に対して挨拶発話を行う。
【効果】 双方が対話参加状態となる空間陣形を生成した後に挨拶発話を実行するので、ロボットは人との対話を自然に開始でき、円滑にコミュニケーションを図ることができる。
(もっと読む)
作業ロボット
【課題】左右の車輪の一方が障害物に乗り上げた場合であっても転倒することを抑制でき、安定して走行可能な作業ロボットを提供すること。
【解決手段】作業ロボットは、ロボット本体2及び遠隔監視装置からなり、これらはそれぞれ送信機及び受信機を備え、撮影装置による映像を遠隔監視装置の受信機で受信し、遠隔監視装置の操作部からの操作信号をロボット本体2の受信機で受信する。ロボット本体2は、車台4と、撮影装置と、前輪駆動機構5と、後輪駆動機構6とを備え、各駆動機構5,6は車輪7,8を駆動するモータを備え、遠隔監視装置の操作部で操作可能である。前輪7及び後輪8のホイールが、そのホイールの中心より外側方に先端が位置するように突設されて前記ロボット本体2の転倒を防止する転倒防止部材14をそれぞれ備え、各転倒防止部材14は、少なくとも先端部分のホイールの中心線に垂直な断面が円形に形成されている。
(もっと読む)
ロボット装置
【課題】頭部の高さを低く抑えたままで広い認識可視領域を確保可能なロボット装置を提供すること。
【解決手段】ロボット1は、胴体2と、胴体2の上部に連結された首関節機構4と、首関節機構4により支持された頭部5と、頭部5の前面に配置された認識部6と、を備える。首関節機構4は、胴体2の上面に対する水平方向を長軸とし、胴体2の上面に対する垂直方向を短軸とする楕円形の軌道に沿って、頭部5を移動させることを特徴とする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
ロボット及びその制御方法
【課題】経路計画の計算量を低減することができるロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1の制御方法は、認識部21と、記憶部22と、ハンド部133が設けられたアーム13と、を備え、周囲に障害物91が存在する対象物90にハンド部133を接近させるようにアーム13の動きを制御するロボットの制御方法である。ロボット1は、認識部21により、対象物90の位置情報と、障害物91の固有の情報と、を取得する。ロボット1は、障害物91の固有の情報に対応して記憶部22に予め格納され、ハンド部133が障害物91を回避して対象物90に向かう軌道に関する軌道情報を取得する。そして、ロボット1は、軌道情報に基づいて、アーム13の動きを制御する。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物の移動時及び静止時にかかわらず脚の特徴を抽出して人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と略垂直な平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定してレンジデータを出力する走査部と、レンジデータを所定周期でサンプリングしてセグメントを形成し、セグメントに基づいて脚の特徴を抽出する抽出部と、抽出した特徴の運動特性及び幾何情報に基づいて人物を検出する検出部を備え、抽出部は、最短距離近傍法を用いて取得した2つのセグメントペアの移動特性に基づいて、各セグメントペアが静止している静止セグメントを分類する静止特徴強分類器と、各セグメントペアが移動している移動セグメントを分類する移動特徴強分類器を含み、分類されたセグメントの特徴に基づいて2つのセグメントペアから脚ペアを抽出するように構成する。
(もっと読む)
シミュレーションシステムおよびそのためのシミュレーションプログラム
【課題】本発明は、作業ロボットが行う作業に求められる作業精度を満たす精度で、取得した画像データから作業対象物の3次元位置・姿勢認識を行い、作業ロボットが当該作業を適切に行うようシミュレーションすることが可能なシミュレーションシステムおよびそのためのシミュレーションプログラムの提供を目的とする。
【解決手段】本発明にかかるシミュレーションシステムは、撮像部20、特に第2撮像部22の倍率設定、フォーカス設定等の撮像パラメータを制御し、作業に要求される作業精度を満たす解像度で画像データを取得することにより、作業対象物10自体の大きさや、作業対象物10と撮像部20との距離に影響されて解像度が低下することを防ぎ、作業対象物10に対する必要な3次元位置・姿勢認識精度を維持することができるので、シミュレーションおよび現実の作業において作業効率の低下や、作業の失敗確率の増大を招くことを抑制できる。
(もっと読む)
ロボットシステムおよびロボット組立システム
【課題】
三次元計測装置を用いて複数種類の部品を把持するのに適したロボットシステムを提供する。
【解決手段】
所定の計測領域の三次元情報を計測する三次元計測装置と、前記三次元情報から対象物の位置姿勢を求める位置姿勢認識装置と、鉛直な第1軸を旋回軸として固定ベースに水平旋回可能に取り付けられた旋回ヘッドによりアームを水平旋回させ、アームの先端に取り付けられた前記対象物を把持するツールの先端の動作領域が前記第1軸を回転軸とする回転体領域である垂直多関節ロボットと、から構成されるロボットシステムであって、動作領域内に第1軸を中心とした一定の角度ごとに複数の作業領域を設定し、ツールが一の作業領域に存在する場合に、前記計測領域が他の作業領域を包含する位置にて前記三次元計測装置の計測部を前記旋回ヘッドに固定する。
(もっと読む)
ロボット制御システム
【課題】スマートフォン等の携帯情報端末を利用して遠隔制御を行うロボットを制御するロボット制御システムを提供することを課題とする。
【解決手段】制御システム1は、ロボット2と、無線通信回線31と接続可能な携帯情報端末3と、ロボット2を制御する制御情報8を送出する遠隔制御端末7とを具備する。ロボット2は、携帯情報端末3を着脱自在に装着可能な頭部9及び胴体部10からなるロボット本体11と、ロボット本体11の下方に取設され、一対の走行車輪21a,21bを有する倒立二輪機構を採用した走行機構部5と、遠隔制御端末7から送出された制御情報8を携帯情報端末3を通じて受付け、ロボット2の動作制御及び走行制御を行うロボット制御部12とを具備して主に構成されている。
(もっと読む)
ロボット制御方法、プログラム、及びロボット
【課題】ロボットの自律動作における不自然さを軽減させる。
【解決手段】可動部を有するロボットが、センサから出力される音声データまたは画像データに基づいて、ロボットに対する対話要求を検出し、検出された対話要求を示す検出データに検出の信頼度を含めて出力し、信頼度が所定レベルより高い場合は、検出データに基づいて可動部を動作させ、信頼度が所定レベルより高くない場合は、予め登録された動作データに基づいて可動部を動作させる。
(もっと読む)
ロボットおよび制御システム
【課題】
連続状態変数および離散状態変数の組み合わせ最適化問題の解導出の高速化を図ることができる制御システム等を提供する。
【解決手段】
内部モジュールmod1による行動候補ai1の探索範囲(第1探索範囲)は、低周波の外部モジュールmod2による外部行動候補ai2の探索範囲(第2探索範囲)よりも狭くすることで、その分だけ演算処理が早くなる。これにより、ロボットRの状態測定値に鑑みて、ロボットRが外乱に緊急に対応する必要がある場合、低周波の外部モジュールmod2の演算処理結果を待たずに、高周波の内部モジュールmod1の演算処理結果にしたがってロボットRの動作が制御されうる。
(もっと読む)
制御装置
【課題】撮像画像により対象物またはロボットの動作部位を認識することが困難な状況となった場合にも、タスクを継続して実行することができるロボットの制御装置を提供する。
【解決手段】追跡処理手段151は、撮像画像において第1対象物T1またはロボットRの動作部位を検出する第1注視点A1を設定し、第1注視点A1により第1対象物T1またはロボットRの動作部位を追跡する。このとき、追跡処理手段151は、第1注視点A1を喪失した場合に、喪失した第1注視点A1と異なる第2注視点A2に変更するなど、第1対象物T1またはロボットRの動作部位の検出方法を変更する。
(もっと読む)
移動ロボット
【課題】移動中に繰り返し取得される障害物センサのデータを統合した環境マップを生成するのに要する計算コストを低減した移動ロボットを提供する。
【解決手段】移動ロボットは、移動中に繰り返し周囲の障害物を検知する。オドメトリ部は、障害物検知を行った検知地点間の距離と夫々の検知地点における検知方向の間の角度を記録する。マップ生成部は、記録された距離と角度に基づいて、各検知地点における障害物センサのデータを統一の座標系に写像した環境マップを生成する。マップ生成部はさらに、最新の検知地点との距離が既定の距離閾値より大きいという距離条件、及び、前記最新の検知地点における検知方向との角度が既定の角度閾値よりも小さいという角度条件、を共に満足する過去の検知地点におけるセンサデータを、環境マップを生成するための元データから除外する。
(もっと読む)
ロボット、位置推定方法及びプログラム
【課題】ロボット、位置推定方法及びプログラムにおいて、比較的簡単、且つ、正確に観測対象であるユーザの位置を推定することを目的とする。
【解決手段】少なくとも1軸を中心に回転可能なカメラの撮像画像から観測対象と推定される観測対象らしき画像の観測値を画像生成部により計算し、観測対象の位置の過去の推定結果と現在の前記カメラの姿勢に基づいて観測対象らしき画像の予測値を画像予測部により計算し、画像比較部により前記観測値と前記予測値を比較して前記観測値と前記予測値の一致度を尤度として計算し、前記尤度に基づいて前記観測対象の位置を位置推定部により推定するように構成する。
(もっと読む)
応対ロボット、応対制御方法、及び応対制御プログラム
【課題】ロボットが人に接近する動作を人の動きに応じて適切に制御できるようにする。
【解決手段】自律的に移動し、人に対する応対行動を行うロボットにおいて、人の位置及び動きを検知する人検知部23と、人検知部23により検知された情報に基づいて人の移動経路を予測すると共に人の移動方向の変化に応じて移動経路を修正する人経路予測部24と、人の移動経路に基づいて応対行動を実施するためにロボットが人に接近する移動経路を生成するロボット経路生成部25と、人の移動経路とロボットの移動経路との交点を想定する交点想定部26と、ロボットが移動可能な応対可能領域内に交点が存在するか否かを判定する判定部27と、交点が応対可能領域から外れた場合に応対行動のための移動を停止する停止部28とを備える。
(もっと読む)
操作指示認識装置及びロボット
【課題】特定の人物のみが確実に操作指示を行うことができ、それ以外の人物による操作指示を禁止する。
【解決手段】操作指示認識装置は、撮像を行い、対応する画像データを出力するカメラ14を有するとともに、カメラ14から出力された画像データに含まれる人物1の手2の領域を検出し、対応する手領域データを生成する手領域検出処理G2を実行し、手領域検出処理G2により生成された手領域データに基づき、手2の領域を検出した人物1が、予め定められた特定の人物1であるかどうかを判定する人物判定処理G3を実行し、人物判定処理G3による判定が満たされた場合に、手領域検出処理G2において生成された手領域データに基づき、特定の人物1の操作指示に対応した特定の手2の姿勢を判定する指示判定処理G4と、を実行する。
(もっと読む)
ロボット装置、ロボット装置の制御方法およびプログラム
【課題】ユーザとロボットの間で対象に関する共同注意の成立を補助可能な、ロボット装置、ロボット装置の制御方法およびプログラムを提供する。
【解決手段】対象Oに関する共同注意の成立をロボット100に促すための指令をユーザ10から取得するコマンド受信部151と、指令の取得に応じて、光束Lの照射により対象を指示するためにユーザにより操作されるポインタ200の位置および姿勢を推定する位置姿勢推定部159と、位置および姿勢の推定結果に基づき、光束の照射により指示されている対象の方向を特定し、方向の特定結果に基づき、周辺環境を表す環境地図EM上で対象を特定する対象特定部160とを備える。
(もっと読む)
自己位置推定装置および自己位置推定方法
【課題】高サンプリング周期で、高精度に自己位置を推定することが可能な自己位置推定装置を提供する。
【解決手段】本発明の自己位置推定装置は、移動機構を備え、所定の空間を移動可能な自律移動装置の移動機構による動作情報を検出する内界センサ、および所定の空間内に関する空間情報を検出する外界センサによる検出結果に基づいて、第1のサンプリング周期で自己位置を推定する第1の自己位置推定部と、第1の自己位置推定部による自己位置推定結果と、内界センサにより検出された自律移動装置の動作情報とに基づいて、第1のサンプリング周期よりも高いサンプリング周期で自己位置を推定する第2の自己位置推定部と、を備える。
(もっと読む)
1 - 20 / 105
[ Back to top ]