
Fターム[3C007KT06]の内容
マニピュレータ、ロボット (46,145) | 視覚装置、画像化装置 (2,194) | カメラの配置又は取付 (702) | マニピュレータ以外に設けたもの (306)
Fターム[3C007KT06]に分類される特許
1 - 20 / 306
6軸ロボットの軸間オフセット検出方法
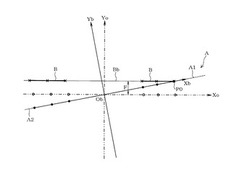
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、手先をロボット座標のX(Xb)軸上の複数の移動目標位置に移動させる。このとき、発光ダイオードの位置を3次元計測器により計測し、移動目標位置と実際の移動位置との誤差を基にして軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
立体視ロボットピッキング装置

【課題】カメラとワークの間隔が長くなるのを抑制し、ステレオ方式でワークの3次元位置を算出しロボットの吸引部の配置位置を決める立体視ロボットピッキング装置を提供する。
【解決手段】コンテナ11内のワーク12を順次ロボット13によって別位置に移動する立体視ロボットピッキング装置10において、ワーク取出し位置18までコンテナ11を送る移動手段14と、ワーク取出し位置18にあるコンテナ11全体を撮像するカメラ15と、ワーク取出し位置18にあるコンテナ11を部分的に撮像するカメラ16と、カメラ15、16が撮像した各画像中のワーク12をパターンマッチングによって検出して、各画像中でのワーク12の2次元位置を算出する画像処理手段23とを有し、カメラ15、16は、コンテナ11の移動方向に沿って配置され、画像処理手段23は、カメラ15、16の各画像中のワーク12の2次元位置からワーク12の3次元位置を算出する。
(もっと読む)
ピッキング用部品供給装置、および部品ピッキング装置
【課題】
部品供給装置に多数の部品を山積み状態でストックしても、容易かつ確実に部品の山積み状態を変えることが可能な山積み部品供給装置を提供する。
【解決手段】
前記収容容器の底面を構成する容器底部と、収容容器の壁面を形成する円筒形状であって、当該円筒形状の軸を回転軸として前記容器底部に対して相対回転可能な収容容器本体と、前記前記収容容器本体に所定の回転動作をさせる容器本体駆動部と、を備えた。
(もっと読む)
荷姿認識装置
【課題】自動車の組立部品の納入等の物流工程において、パレット上に積載された箱体の種類、形状、寸法及び位置等の荷姿情報を自動的に認識する荷姿認識装置を提供する。
【解決手段】走査装置7の可動ラインカメラ8及び固定ラインカメラ10により、パレット2上に積載された箱体3の第1面〜第4面W1、W2、L1、L2について走査する。走査データから、箱体3に貼り付けられた帳票4の2次元コードを抽出し、2次元コードの位置を表す座標データを生成し、また、抽出した2次元コードに基づきデータベースから箱体3の形状、寸法及び2次元コードの表示位置を含む箱体情報を取得し、2次元コードの位置を表す座標データ及び箱体情報に基づき、パレット2上に積載された箱体3の荷姿情報として、箱体3の各部の座標データを生成する。
(もっと読む)
画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置
【課題】汎用的なロボットが配置されている生産ラインであっても、コンベアトラッキング等の処理を容易に実現できる画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置を提供する。
【解決手段】画像処理装置は、搬送装置上のワークの位置情報を管理する管理手段と、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する取得手段と、管理手段によって管理されているワークの位置情報を撮像部の撮像が行われたタイミングに対応する値に更新する更新手段と、更新手段による更新後の位置情報と計測処理によって取得されたワークの位置情報とを比較することで、撮像部の撮像範囲内に新たに搬送されたワークを特定する特定手段と、特定手段が特定したワークの位置情報を制御装置へ送信する送信手段とを含む。
(もっと読む)
ロボット制御装置、物品取り出しシステム、プログラムおよびロボットの制御方法
【課題】 物品の姿勢がランダムであっても、ロボットを用いて取り出し部位を把持して、物品を取り出す。
【解決手段】 複数の取り出し部位を備える物品の位置・姿勢情報に基づいて、前記複数の取り出し部位にそれぞれ設定された把持方向のうち、所定の方向となす角度が最小となる把持方向を選択方向として選択する方向選択部と、前記複数の取り出し部位のうち、前記把持方向として前記選択方向が設定された取り出し部位を把持して前記物品を取り出すようにロボットを制御する制御部と、を有する。
(もっと読む)
ロボット監視システム、及びロボット監視システムの異常判定方法
【課題】ロボットの移動先の異物等をリアルタイムで監視することのできるロボット監視システム、及びロボット監視システムの異常判定方法を提供する。
【解決手段】ロボットコントローラ30は、予め正常状態でアーム21を動作させた際に、カメラユニット40により取得された撮像画像と、算出された撮像時のアーム21の姿勢とを対応付けてデータ記憶部31に保存しておく。シミュレータ50は、アーム21が動作する際の各姿勢について、その姿勢から所定周期経過するまでにアーム21が動作する動作範囲を算出する。ロボットコントローラ30は、アーム21の動作を制御する際に、算出されるアーム21の姿勢に対応する正常状態の撮像画像をデータ憶部31から読み込み、カメラユニット40により取得される撮像画像と正常状態の撮像画像とにおいて、動作範囲に対応する部分を比較して異常の有無を判定する。
(もっと読む)
ピッキング用ワーク供給装置、およびワークピッキング装置
【課題】
バラ積みされたワークの位置と姿勢を確実に変化させ、新たなバラ積み状態を生成するピッキング用ワーク供給装置、および当該ピッキング用ワーク供給装置を用いたワークピッキング装置を提供する。
【解決手段】
ワーク供給装置に、複数のワークをバラ積み可能な上方が開いた容器本体と、前記容器本体の底部から上方内側に進退自在に設けられた突出部と、前記突出部を進退自在に動作させる突出駆動部と、を備えている。
(もっと読む)
電磁石ハンドおよびそれを用いたロボットシステム
【課題】箱体内にバラ積み状態で収容されたワークを、中断することなく、干渉なく、一つずつピッキングする。
【解決手段】箱体C内にバラ積み状態で収容された複数の円柱または円筒形状ワークWをピッキングするロボット12を有するロボットシステム10であって、ロボット12は、第1の電磁吸着面20aでワークWの円周面Wpまたは端面Weを電磁吸着する主電磁吸着部20と、先端24に且つ互いに鈍角に配置された第2及び第3の電磁吸着面22a,22bの両方でワークWの円周面Wpを電磁吸着するまたは第2または第3の電磁吸着面22a,22bのいずれか一方でワークWの端面Weを電磁吸着する副電磁吸着部22とを有する電磁石ハンド18を有する。ロボット12は、バラ積み状態の複数のワークWそれぞれを、異なる複数の電磁吸着形態でピッキングする。
(もっと読む)
ロボット位置検出装置及びロボットシステム
【課題】移動中のロボットから検出される該ロボットの位置に対してその精度を高めることが可能なロボット位置検出装置及びロボットシステムを提供する。
【解決手段】位置算出部60は、トリガー信号が入力されるトリガー信号入力部61と、エンコーダーから出力された位置データが通信時間の分だけ遅れて入力される位置データ入力部62と、入力された位置データを取得してトリガー信号検出時におけるロボットの位置を算出するデータ処理部63とを備えている。データ処理部63は、トリガー信号が検出される前に取得した第1の位置データとそのタイミング、及び、トリガー信号が検出された後の第2の位置データとそのタイミングを用いてロボットの位置を線形補間し、トリガー信号が入力されたタイミングよりも通信時間だけ後の位置をトリガー信号検出時におけるロボットの位置として算出する。
(もっと読む)
ロボット制御装置、ロボット制御方法、およびプログラム
【課題】曖昧な命令をロボットに入力しても、ロボットに動作を行わせることができず汎用性のあるロボット制御装置、ロボット制御方法、およびプログラムを提供すること。
【解決手段】シナリオとサブシナリオとが対応付けられて登録されているデータベース103と、入力装置62から入力された命令を取得する命令取得部101と、命令取得部が取得した命令に対応するサブシナリオをデータベースから読み出して、サブシナリオに基づいてロボット1を制御する制御コマンドを生成する制御コマンド生成部104とを備え、制御コマンド生成部は、命令取得部が取得した命令を実行するのに必要な要素に未取得の要素がある場合、ロボットに未取得の要素を取得させる命令を抽出してロボットに送信し、ロボットが取得した要素をサブシナリオに組み込んでロボットを制御する制御コマンドを生成する。
(もっと読む)
棒状部材の搬送装置
【課題】複雑な機構を利用せずに、ランダムに配置された棒状部材を逐次的に効率よく取出し、取出した棒状部材を所定の場所に搬送することができる搬送装置の提供。
【解決手段】吸引装置18は、ロボットハンド22に取付けられたノズル24を有し、取出し対象の棒状部材14aの第1の円柱状部分30の端部にノズル24を接近させ、第1の円柱状部分30をノズル24内に吸引しながら、ノズル24を上昇させて棒状部材14aを保持するように構成されている。
(もっと読む)
ロボットシステム
【課題】少ない時間で操作を習得することができる、直感的なロボットの遠隔操作インタフェースを提供する。
【解決手段】ロボットの操作装置が、カメラから取り込まれたカメラ映像が表示されるタッチスクリーンと、カメラ映像からロボットの3次元的な位置及び姿勢を認識するロボット認識部と、ロボット認識部で認識した位置及び姿勢とからロボットのCG映像を生成し、CG映像をタッチスクリーン上のロボットのカメラ映像に重畳表示するCG合成部と、ユーザのタッチ操作に応じて、タッチスクリーン上でCG映像のロボットを仮想的に動作させる操作入力部と、CG映像のロボットの仮想的な動作に追従してロボットが動作するように、ロボットに対して制御命令を送出するロボット制御部と、を有している。
(もっと読む)
マスタ操作入力装置及びマスタスレーブマニピュレータ
【課題】より故障に強い構成で操作部の位置・姿勢を検出することが可能なマスタ操作入力装置及びそのようなマスタ操作入力装置を備えるマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置の入力部に設けられた把持部の位置・姿勢の指令値を、把持部に取り付けられた関節の駆動量を検出するエンコーダの出力信号に基づいて算出するとともに、撮像センサで得られた画像に基づいて算出する。エンコーダの出力信号に従って算出された指令値と撮像センサで得られた画像に従って算出された指令値との間に所定以上の差がある場合にエラー処理を行う。
(もっと読む)
ワークピッキングシステム
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
画像処理装置および画像処理システム
【課題】撮像装置に対する撮像指示を発生してから実際に撮像が行われるまでにタイムラグが存在する場合であっても、正確にトラッキング処理を行うことのできる視覚センサを提供する。
【解決手段】画像処理装置は、搬送装置の搬送経路における移動量を示す信号を受付けるインターフェイスと、搬送経路において撮像部の撮像範囲より下流側に配置されるとともにワークを取り扱う移動機械、を制御するための制御装置と通信するためのインターフェイスと、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する手段と、制御装置との間で搬送経路における移動量を同期して保持する手段と、撮像指示に応答して撮像部による撮像を開始する手段と、位置情報と当該位置情報の取得に用いた画像を撮像したときの移動量とを制御装置へ送信する手段とを含む。
(もっと読む)
ロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法
【課題】ロボットが有する駆動源の駆動量と実際のロボットの状態とを画像に基づいて対応付ける処理の効率を高めることの可能なロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法を提供する。
【解決手段】
水平多関節ロボット10(ロボット10)用位置検出装置は、撮像対象であるロボット10又はワークWを撮像するカメラ22と、撮像対象の位置を画像から算出する制御部33と、ロボット10の第1及び第2モーター11a,13aの駆動量を取得するI/O31と、撮像対象の算出位置と駆動量とを対応付けて記憶する。上記カメラ22及びI/O31には、撮像対象の位置を検出するための共通するトリガー信号が入力される。カメラ22は、トリガー信号の入力によって撮像対象の撮像を開始する一方、I/O31では、同トリガー信号の入力によって制御部33が駆動量を得る。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】ターゲットのサブピクセルレベルでの位置検出を高精度に行う。
【解決手段】ロボット装置1は、ターゲットを搬送可能に保持する多関節ロボット10と、ゴール位置とターゲットとを撮像する撮像装置20と、画像上のゴール位置にピクセルレベルで位置合わせされたターゲットをサブピクセルレベルの変位量で変位させたときの画素値の変化量により表される感度に応じて、ターゲットが配置された状態のゴール画像データを記憶するゴール画像記憶部と、撮像装置20から得られるターゲットを含む画像データとゴール画像記憶部に記憶されたゴール画像データとの比較に基づいてターゲットの一致度評価値を計算し、この一致度評価値に基づいてゴール位置に対するターゲットの位置ずれを検出するターゲット検出部と、この位置ずれをなくす方向にターゲットを搬送するよう多関節ロボット10を制御するロボット制御装置50とを備えた。
(もっと読む)
ロボット、ロボット制御装置、ロボット制御方法、およびロボット制御プログラム
【課題】汎用性の高いねじ締めを行えるロボット、ロボット制御装置、ロボット制御方法、ロボット制御プログラムを提供する。
【解決手段】ドライバービット51の先端の係合部52が磁化されているドライバー50を把持するアーム部20と、アーム部20を制御する制御部100とを備え、制御部100は、ドライバー50の係合部52を磁力により係合可能な頭部を有するねじ211の頭部頂面の溝に押しつけた状態で、ドライバー50の係合部52にねじ211の頭部頂面の溝が嵌合した状態で磁力により生じる吸着力よりも小さく、ドライバーの係合部52にねじ211の頭部頂面の溝が当接した状態で磁力により生じる吸着力よりも大きい慣性力がねじ211に作用する第1の所定の加速度で、ねじ211が吸着されたドライバー50を移動させる。
(もっと読む)
ハニカム構造体の搬送装置、及び、ハニカム構造体の封口方法
【課題】ハニカム構造体の貫通孔と封口用マスクの貫通孔との正確な位置合わせを容易に行なうことのできるハニカム構造体の搬送装置及びハニカム構造体の封口方法を提供する。
【解決手段】初期回転角度認識部が、カメラ90の画像に基づいてハニカム構造体70の初期回転角度を認識し、必要回転角度取得部が、アーム水平旋回部62の駆動に伴うハニカム構造体70の回転角度に基づいて、封口用マスク170に対するハニカム構造体70の回転角度を所望の最終回転角度とするために必要な回転角度を取得し、ハンド軸回転制御部が、必要な回転角度に基づいてハンド軸回転部20を駆動してハンド10が把持したハニカム構造体70を回転させる。ハニカム構造体70を封口用マスク170の上に所望の回転角度として配置できるので、封口用マスク170とハニカム構造体70との位置合わせが容易となる。
(もっと読む)
1 - 20 / 306
[ Back to top ]