
Fターム[3C007KT05]の内容
マニピュレータ、ロボット (46,145) | 視覚装置、画像化装置 (2,194) | カメラの配置又は取付 (702) | 腕又は手に設けたもの (291)
Fターム[3C007KT05]に分類される特許
1 - 20 / 291
ロボット装置、位置姿勢検出装置、位置姿勢検出プログラム、および位置姿勢検出方法
【課題】平面画像により表現された対象物体の、立体空間における位置および姿勢を高精度に検出する。
【解決手段】対象物体を撮像して画像データを生成する撮像装置11と、撮像装置11を可動に支持するロボット本体12と、リファレンスに対する撮像装置11からの視線方向ごとに、視線方向に対する面のテンプレート画像データとロボット座標系における面の位置および姿勢を表す情報とロボット座標系における撮像装置11の位置および姿勢を表す情報とを有するテンプレート情報を記憶するテンプレート情報記憶部と、撮像装置11が生成した画像データに含まれる対象物体の画像から可視である面を検出し、テンプレート情報記憶部から、可視である面に対応するテンプレート情報を読み込み、テンプレート情報に基づいてロボット座標系における対象物体の位置および姿勢を表す位置姿勢データを生成する位置姿勢データ生成部とを備えた。
(もっと読む)
移動ロボットシステム、移動ロボット制御装置、該制御装置に用いられる移動制御方法及び移動制御プログラム

【課題】高度な計算処理装置や操作者による画面の連続的な注視を必要としない移動ロボットシステムを提供する。
【解決手段】タッチパネル22は、操作者が押下することにより、表示されている画面内の任意の位置を指定可能な構成とされている。
タッチパネル22に表示されている画面内にある任意点の位置を操作者が指定(画面タッチ)したとき、任意点の位置に対応する実際の位置を目標位置(目標地点P)として、ロボットの移動機構を制御して同ロボットを自動的に移動すると共に、操作者の手動による操作に対応して移動機構を制御するための融合型操作インタフェース(タッチパネル22、マニュアル操作部23)が設けられている。
(もっと読む)
ワークピッキングシステム
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
マニプレータ装置およびマニプレータ付き作業装置
【課題】
任意の位置にある把持対象物が、マニプレータによる把持可能な範囲に入るように、マニプレータを操作するための情報を取得し、また、その情報を操作者に分かりやすく提示する。
【解決手段】
アーム部とハンド部から成り、当該ハンド部は、把持範囲にある対象物を把持する1つまたは複数の指部を有するマニプレータ装置であって、前記指部の先端に第1の全方位撮像装置を設けるとともに、前記ハンド部の、前記指部の先端以外の位置に第2の全方位撮像装置を設け、前記第1の全方位撮像装置と前記第2の全方位撮像装置とは撮像軸が異なるように、例えば直交するように構成する。第1の全方位撮像装置による撮像画像に対象物が投影されず、且つ、第2の全方位撮像装置による撮像画像に対象物が投影されないことを確認することで、前記対象物が把持範囲にあることを判定することができる。
(もっと読む)
パワーアシスト装置
【課題】小型化および製造コストの低減が図られたパワーアシスト装置を提供する。
【解決手段】パワーアシスト装置10の制御部70は、クランプ部50による伝達部材40のクランプまたはアンクランプを切り替えることによって、ピストン25の移動を、搬送部材40を移動するためのアシスト力または搬送部材を制動するためのアシスト力に変換し、搬送経路Rに沿ってワークWを搬送させる搬送作業を円滑に行うことを可能にする。
(もっと読む)
清掃ロボットシステム及びその制御方法
【課題】
アレンジロボットが、清掃ロボット及びパネル部材の位置等の環境情報を確実に取得し、自律運転することができる清掃ロボットシステム及びその制御方法を提供する。
【解決手段】
ハンド部10に少なくとも清掃ロボット3とパネル部材5の位置及び形状を計測するセンサ12、13を設置した清掃ロボットシステム1の制御方法であって、アレンジロボット2が移動する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、アレンジロボット2の移動を自動制御するステップと、アレンジロボット2が清掃ロボット3を把持する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、マニピュレータ4が清掃ロボット3を把持する作業を自動制御するステップを有する。
(もっと読む)
レーザ加工ロボットの教示方法及び教示装置
【課題】レーザ加工ロボットの教示作業を容易且つ正確に行えるようにする。
【解決手段】測定レーザと加工レーザとを出力するレーザスキャナを有し、加工レーザをワークに照射してレーザ加工を行うレーザ加工ロボットの教示方法が、ワーク上の基準照射位置を基準として予め定められた基準図形に基づき測定レーザをワーク上に照射する際に、測定レーザの照射位置を制御する制御手順S4と、レーザスキャナから照射された測定レーザが、ワークにおいて反射された反射光を測定する測定手順S5と、反射光と基準図形を比較し、基準照射位置におけるワークの表面の傾斜を算出する傾斜算出手順S6と、傾斜算出部が算出した傾斜から前記ロボットの姿勢に関する教示データを作成するデータ作成手順S7と、を有する。
(もっと読む)
ロボット制御設定支援装置
【課題】対象ワークのCADモデルや作業内容雛形が不要で、ロボット動作の制約事項を考慮してロボット動作教示とその際の画像処理を支援する装置を提供する。
【解決手段】教示作業者との対話的な処理を行い、2次元画像・3次元データ処理部が表示した対象ワークに係る2次元画像と3次元データに対し入力に従い対象ワーク位置姿勢に対するロボット目標位置姿勢を決める画像処理を行い、制約条件算出・評価処理部が画像処理結果のロボット目標位置姿勢に従い操作されたロボットの動作の制約条件の算出評価を行い承諾入力がなければあるまで新たな入力に従い目標位置姿勢を決定する画像処理を行わせ新たな目標位置姿勢に従いロボット動作の制約条件算出評価を行い、ロボット動作モニタ部が承諾条件でのロボット動作手順を記録し、処理手順解析・再構成処理部が記録された一連の処理内容を表示し入力に従い冗長処理の統合、削除を行い再記録する。
(もっと読む)
ワーク取り出し方法
【課題】ワークの状態に関係なく密集した複数のワークの中から任意のワークを簡単に取り出すことができるワーク取り出し方法を提供する。
【解決手段】本発明に係るワーク取り出し方法によれば、検出されたワークWの位置及び姿勢に基づき任意のワークWが第1方向D1に押し動かされる。こうしてワークW上に第1チャック15aで把持可能な第1把持領域A1が確保される。その結果、第1チャック15aはワークWの第1把持領域A1を確実に把持することができる。その後、ワークWの一端が持ち上げられて、第2チャック15bが把持可能な第2把持領域A2が確保される。その結果、第2チャック15bはワークWの第2把持領域A2を確実に把持することができる。こうしてワーク取り出し装置1は、ワークWの状態に関係なく密集した複数のワークWの中から任意のワークWを簡単に取り出すことができる。
(もっと読む)
座標系校正方法及びロボットシステム
【課題】ロボットの手先座標系と視覚センサのセンサ座標系の相対的な関係を記述する関連情報としてパラメータを容易に校正できる座標系校正方法を提供すること。
【解決手段】ロボット30のロボット座標系35に一つのマーク10を配置し、視覚センサ20を取り付けたロボット30の手先を移動させて、視覚センサ20の姿勢を変えずに平行移動させた少なくとも第1から第3の3箇所の観測箇所と、マーク10に対して第1から第3の3箇所の観測方向と異なる方向でかつ相互に異なる方向からマーク10を臨む少なくとも第4及び第5の観測箇所で、マーク10の観測を行い、各観測箇所の画像を画像処理してマーク位置認識データを得て、各観測箇所でのロボット30の姿勢データとマーク位置認識データとを対応づけて取得し、両データに基づいて関連情報を校正する。
(もっと読む)
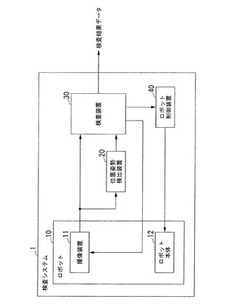
追跡ロボット装置、追跡ロボット制御方法、追跡ロボット制御プログラム、ホモグラフィー行列取得装置、ホモグラフィー行列取得方法、およびホモグラフィー行列取得プログラム
【課題】リアルタイム性を確保し且つ安定性の高いトラッキングを行う。
【解決手段】ホモグラフィー行列取得装置30は、撮像装置11が出力する画像データを取り込む。ホモグラフィー行列取得装置30は、画像データごとに局所的ホモグラフィー行列を計算し、また、その計算レートよりも低いレートで、大域的ホモグラフィー行列を計算する。ホモグラフィー行列取得装置30は、画像データごとに、局所的ホモグラフィー行列を用いて画像データを変換し、参照画像との相関を求める。相関が高い場合は、当該画像データに対応して計算した局所的ホモグラフィー行列が読み出されるように制御する一方、相関が低い場合は、最新の大域的ホモグラフィー行列が読み出されるように制御する。ロボット制御装置45は、ホモグラフィー行列取得装置30からホモグラフィー行列データを読み込んでロボット本体12の姿勢を計算し動作を制御する。
(もっと読む)
把持装置及びロボット装置
【課題】一対のフィンガーの把持動作に用いられる回転駆動源を、一対のフィンガーの回転駆動に兼用する。
【解決手段】モータ5は、フレーム6から回転軸5bが突出するようにフレーム6に収容されている。回転軸5bには、ピニオン7が固定されている。また、フレーム6に対してグリッパ基台12が回転可能に設けられている。一対のラック10,10が、グリッパ基台12に支持されて、ピニオン7を間に挟んでピニオン7に噛み合っている。一対のラック10,10には、フィンガー4,4が固定されている。フレーム6には、グリッパ基台12の回転を規制するロック機構14が設けられている。ロック機構14は、一対のラック10,10の移動が規制されると、グリッパ基台12への係止が解除され、グリッパ基台12の回転が許容される。
(もっと読む)
玉掛けロボット及びこれを用いた玉掛けシステム
【課題】不正確な玉掛けを解消して、正確に玉掛けを実施することができる玉掛けロボット及びこれを用いた玉掛けシステムを提供すること。
【解決手段】玉掛けシステム1は、多関節ロボット20bと、多関節ロボット20bのアームに取り付けられるロボットハンド30であって、鋼材玉掛用の吊ワイヤを把持又は解放するロボットハンド30と、吊ワイヤに取り付けられた反射テープ14cを照明する照明機器18aと、所定の検出感度に設定され反射テープを検出しカメラ映像として出力するCCDカメラ18bと、そのカメラ映像に基づいて反射テープの位置を求める画像処理雄値18と、反射テープの位置に基づいて吊ワイヤを把持させる把持命令をロボットハンド30に送信して当該ロボットハンド30を制御する玉掛けロボット制御装置16とを備える。
(もっと読む)
ロボット
【課題】対象物を逃がさず且つ確実に決められた位置で把持することが可能なロボットを提供する。
【解決手段】一対の指部12を開閉させて対象物を把持する把持部10Aと、対象物と把持部10Aとを相対移動させる移動装置と、移動装置を制御して把持部10Aを対象物に向けて相対移動させ、対象物の周辺に一対の指部12を配置させた後、把持部10Aを制御して一対の指部12を対象物が載置された載置面と平行な面で開閉させ、対象物の側方から一対の指部12の間に対象物を挟み込ませ、3点以上の接触点で把持部10Aに対象物を把持させる制御装置と、を備えている。
(もっと読む)
ロボット制御装置、ロボットおよびロボット制御装置の教示方法
【課題】撮影動作の教示操作が煩雑になるのを抑制することが可能なロボット制御装置を提供する。
【解決手段】このロボットシステム100は、教示位置の入力と、少なくとも教示位置に対応付けられるコマンド情報の選択とを受け付けて教示位置とコマンド情報とを組み合わせた教示データを作成する教示装置3と、教示データに基づいて動作指令を生成する指令生成部24とを備え、教示装置3により選択されるコマンド情報は、教示位置と、予め設定された教示位置に基づく補助的な動作をロボットに動作させるための補助情報とに対応付けられたステレオ視コマンドを含む。
(もっと読む)
シミュレーションシステムおよびそのためのシミュレーションプログラム
【課題】本発明は、作業ロボットが行う作業に求められる作業精度を満たす精度で、取得した画像データから作業対象物の3次元位置・姿勢認識を行い、作業ロボットが当該作業を適切に行うようシミュレーションすることが可能なシミュレーションシステムおよびそのためのシミュレーションプログラムの提供を目的とする。
【解決手段】本発明にかかるシミュレーションシステムは、撮像部20、特に第2撮像部22の倍率設定、フォーカス設定等の撮像パラメータを制御し、作業に要求される作業精度を満たす解像度で画像データを取得することにより、作業対象物10自体の大きさや、作業対象物10と撮像部20との距離に影響されて解像度が低下することを防ぎ、作業対象物10に対する必要な3次元位置・姿勢認識精度を維持することができるので、シミュレーションおよび現実の作業において作業効率の低下や、作業の失敗確率の増大を招くことを抑制できる。
(もっと読む)
投影面情報提示装置と方法
【課題】ロボットハンドと対象物との相対位置誤差を拡大表示することができ、これにより目視かつ手動操作によりロボットハンドを対象物に対して正確に位置決めすることができる投影面情報提示装置と方法を提供する。
【解決手段】 ロボットハンド12に設けられたプロジェクタ22により、原パターンAを対象物2に固定された投射面3上に投射し(S1)、ロボットハンド12に設けられたカメラ24により、投射された原パターンである投射パターンBを撮影し(S2)、撮影した投射パターンである撮影パターンCを、ロボットハンド12が対象物2に対し予め設定した位置と姿勢をとる基準位置において、原パターンAと一致するように変形し(S3)、変形した変形パターンDを原パターンAに重畳する(S5)。(S1)〜(S5)を順に繰り返す。
(もっと読む)
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法
【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
ロボットのティーチングシステム
【課題】所定図形を撮像して取得される画像に基づいてロボットを制御するティーチングシステムにおいて、ロボット周囲の設備から制約を受ける場合であっても、ティーチング棒により適切にロボットを誘導できるようにする。
【解決手段】ロボットのティーチングシステムは、複数の関節を有するアーム12を動作させる多関節型ロボット10と、ロボット10の誘導に用いられるティーチング棒60と、ティーチング棒60に設けられキャリブレーションボードCの映像を表示する表示器と、アーム12に設けられ対象を撮像して画像を取得するカメラ14と、を備える。ティーチングシステムは、ボードCの映像がカメラ14により所定の目標画像として取得されるようにアーム12の動作を追従制御するロボットコントローラ20と、ボードCの映像の大きさ及び向きの少なくとも一方を、表示器から離れた位置で変更可能とするティーチングペンダント30と、を備える。
(もっと読む)
ロボット
【課題】対象物を逃がさず且つ確実に決められた位置で把持することが可能なロボットを提供する。
【解決手段】一対の指部12と一対の指部12が接続された本体部11とを有し、一対の指部12の一端部14が本体部11と離間する位置に設けられた第1回転軸13の周りに回転可能に接続され、一対の指部12の他端側が第1回転軸13を中心として対象物が載置された載置面と平行な面で揺動することにより一対の指部12を開閉させて対象物を把持する把持部10Aと、対象物と把持部10Aとを相対移動させる移動装置と、移動装置を制御して把持部10Aを対象物に向けて相対移動させ、対象物の周辺に一対の指部12を配置させた後、把持部10Aを制御して一対の指部12を載置面と平行な面で開閉させ、対象物の側方から一対の指部12の間に対象物を挟み込ませ、3点以上の接触点で把持部10Aに対象物を把持させる制御装置と、を備えている。
(もっと読む)
1 - 20 / 291
[ Back to top ]