
Fターム[3C007KX02]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 基台に設けるもの (244)
Fターム[3C007KX02]に分類される特許
1 - 20 / 244
棒状部材の搬送装置
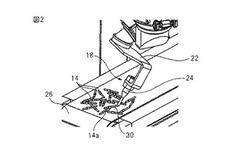
【課題】複雑な機構を利用せずに、ランダムに配置された棒状部材を逐次的に効率よく取出し、取出した棒状部材を所定の場所に搬送することができる搬送装置の提供。
【解決手段】吸引装置18は、ロボットハンド22に取付けられたノズル24を有し、取出し対象の棒状部材14aの第1の円柱状部分30の端部にノズル24を接近させ、第1の円柱状部分30をノズル24内に吸引しながら、ノズル24を上昇させて棒状部材14aを保持するように構成されている。
(もっと読む)
ロボットシステムおよびそれに用いる空間陣形認識装置

【構成】 ロボットシステム100は、ロボット10およびモーションキャプチャシステム12を含む。ロボットシステム100では、ロボット10および人の位置、体の向きおよび視線方向を用いてロボット10と人との空間陣形を分析し、ロボット10および人の対話参加状態を認識する。そして、認識した対話参加状態に応じて、ロボット10が適宜の行動を取ることによって、ロボット10および人の双方が対話参加状態になるようにした後、ロボット10が人に対して挨拶発話を行う。
【効果】 双方が対話参加状態となる空間陣形を生成した後に挨拶発話を実行するので、ロボットは人との対話を自然に開始でき、円滑にコミュニケーションを図ることができる。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
触覚センサシステム
【課題】触覚センサの配置密度が部位毎に異なるロボットに、触覚センサからの出力信号を情報統合装置へ中継する中継装置を配置するに際し、中継装置の好適な配置態様を提供する。
【解決手段】ヒューマノイドロボット1の触覚センサシステム100は、ヒューマノイドロボット1のロボット本体2の表面に配置された複数のセンサノード200と、複数のセンサノード200から出力された出力信号を中継する中継部401を有するリレーノード120と、リレーノード120の中継部401によって中継された出力信号を受信して処理するホストノード140と、を備える。複数のセンサノード200をヒューマノイドロボット1のロボット本体2の部位に応じて少なくとも2つ以上の区分に区分し、各区分毎に、リレーノード120を配置した。
(もっと読む)
パラレルリンク機構および駆動ステージ
【課題】パラレルリンク機構のテーブルの位置精度を向上する。
【解決手段】パラレルリンク機構1は、ベース2と、ベース2に対して6自由度を有し、ベース2と対向して配置されるテーブル3と、一端がベース2に取り付けられ、他端がテーブル3に取り付けられる伸縮可能なロッド4を有する複数の連結部10と、テーブル3の位置の算出に用いる複数のセンサ部14とを備えている。センサ部14は、一端がベース2に取り付けられ、他端がテーブル3に取り付けられるワイヤ12と、ワイヤ12の長さを計測するセンサ13とを有している。
(もっと読む)
ロボットシステムおよびロボット組立システム
【課題】
三次元計測装置を用いて複数種類の部品を把持するのに適したロボットシステムを提供する。
【解決手段】
所定の計測領域の三次元情報を計測する三次元計測装置と、前記三次元情報から対象物の位置姿勢を求める位置姿勢認識装置と、鉛直な第1軸を旋回軸として固定ベースに水平旋回可能に取り付けられた旋回ヘッドによりアームを水平旋回させ、アームの先端に取り付けられた前記対象物を把持するツールの先端の動作領域が前記第1軸を回転軸とする回転体領域である垂直多関節ロボットと、から構成されるロボットシステムであって、動作領域内に第1軸を中心とした一定の角度ごとに複数の作業領域を設定し、ツールが一の作業領域に存在する場合に、前記計測領域が他の作業領域を包含する位置にて前記三次元計測装置の計測部を前記旋回ヘッドに固定する。
(もっと読む)
ロボット及びロボットの異常判定方法
【課題】距離センサに異常があるか否かを判定することができるロボット及びロボットの異常判定方法を提供すること。
【解決手段】本発明にかかるロボットは、距離センサ15と、距離センサ15と離れて設けられた距離検出ユニット21とを備える。ロボットはさらに、距離検出ユニット21の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第1の距離検出手段と、距離センサ15の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第2の距離検出手段と、第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とを比較する比較手段と、前記比較手段の比較の結果、前記第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とが異なる場合に、距離センサ15が異常であると判定する異常判定手段とを備える。
(もっと読む)
ロボット及びその制御方法
【課題】簡易な構成により作業時の安定性を確保できるロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1は、ロボット本体11、アーム12、台車13、センサ14を備える。アーム12は、ロボット本体11に連結され、関節機構及び伸縮機構のうち少なくともいずれか一方を有する。センサ14は、ロボット本体11の周囲に存在する物体を検知する。ロボット1は、アーム12が稼働する場合、台車13によりセンサ14が検知した物体に接近し、ロボット本体11の一部を当該物体に当接させる。
(もっと読む)
ロボット制御システム
【課題】スマートフォン等の携帯情報端末を利用して遠隔制御を行うロボットを制御するロボット制御システムを提供することを課題とする。
【解決手段】制御システム1は、ロボット2と、無線通信回線31と接続可能な携帯情報端末3と、ロボット2を制御する制御情報8を送出する遠隔制御端末7とを具備する。ロボット2は、携帯情報端末3を着脱自在に装着可能な頭部9及び胴体部10からなるロボット本体11と、ロボット本体11の下方に取設され、一対の走行車輪21a,21bを有する倒立二輪機構を採用した走行機構部5と、遠隔制御端末7から送出された制御情報8を携帯情報端末3を通じて受付け、ロボット2の動作制御及び走行制御を行うロボット制御部12とを具備して主に構成されている。
(もっと読む)
ロボットシステムまたはロボット制御装置
【課題】冗長な自由度を有するマニピュレータをより最適に制御することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】1以上のアクチュエータを有するマニピュレータ2とこれを制御するコントローラ3とを有し、コントローラ3は、アクチュエータの内の一部を冗長軸と設定し、マニピュレータの目標位置姿勢を設定し、マニピュレータが現在の姿勢から目標位置姿勢に達するまでの動作軌跡を生成し、マニピュレータの到達可能範囲内の領域を分割して設定した小領域と各小領域に対応する冗長軸角度用パラメータとを対応付けた冗長角度定義テーブル7を有し、冗長角度定義テーブル中の該当する小領域を選択し、選択結果に基づいて冗長軸角度を設定し、動作軌跡と冗長軸角度とに基づいて動作指令を生成する。
(もっと読む)
ロボットシステム及びロボット制御装置
【課題】ロボットアームと周囲の対象物との接触等で生じる外力を低減することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】ロボットアーム2と、ロボットアーム2に設けられロボットアーム2を駆動させる1以上のアクチュエータ41A〜47Aと、ロボットアーム2とアクチュエータ41A〜47Aとの少なくともいずれかにかかる外力を検出するセンサ部4と、アクチュエータ41A〜47Aの動作を制御するとともに、センサ部4の検出結果に基づいてアクチュエータ41A〜47Aへのトルク指令値を制限するコントローラ3と、を有して構成する。
(もっと読む)
ロボット制御方法、プログラム、及びロボット
【課題】ロボットの自律動作における不自然さを軽減させる。
【解決手段】可動部を有するロボットが、センサから出力される音声データまたは画像データに基づいて、ロボットに対する対話要求を検出し、検出された対話要求を示す検出データに検出の信頼度を含めて出力し、信頼度が所定レベルより高い場合は、検出データに基づいて可動部を動作させ、信頼度が所定レベルより高くない場合は、予め登録された動作データに基づいて可動部を動作させる。
(もっと読む)
2足移動ロボットの制御装置及び歩容生成装置
【課題】2足移動ロボットに片脚ホッピング動作を行なわせるときに、離床・着床動作を行なう脚体の基端部の関節に大きなモーメントが作用するのを防止する。
【解決手段】片脚ホッピング動作を2足移動ロボット1に行わせるとき、離床・着床動作を行なう脚体2(支持脚側脚体2)の離床後の着床状態において、支持脚側脚体2の基端部よりも、支持脚側脚体2と異なる脚体2(遊脚側脚体2)の基端部の方が相対的に高い位置に存在するように、ロボット1の目標運動(上体24の目標姿勢)を生成する。
(もっと読む)
環境認識ロボット
【課題】環境認識動作の処理負荷を軽減させることができる環境認識ロボットを提供すること。
【解決手段】本発明にかかる環境認識ロボットは、ロボット本体11、センサ12、処理部13を備える。センサ12は、ロボット本体11に搭載され、周囲の物体に照射したレーザ光20の反射光を受光することにより検出される当該物体までの距離情報を含む測定データを生成する。処理部13は、測定データに基づいて、周囲の物体を認識する。アーム112には、センサ12から照射されたレーザ光20に対する反射光の強度が、センサ12が検出可能な強度以下となる反射部材が設けられている。
(もっと読む)
自己位置推定装置および自己位置推定方法
【課題】高サンプリング周期で、高精度に自己位置を推定することが可能な自己位置推定装置を提供する。
【解決手段】本発明の自己位置推定装置は、移動機構を備え、所定の空間を移動可能な自律移動装置の移動機構による動作情報を検出する内界センサ、および所定の空間内に関する空間情報を検出する外界センサによる検出結果に基づいて、第1のサンプリング周期で自己位置を推定する第1の自己位置推定部と、第1の自己位置推定部による自己位置推定結果と、内界センサにより検出された自律移動装置の動作情報とに基づいて、第1のサンプリング周期よりも高いサンプリング周期で自己位置を推定する第2の自己位置推定部と、を備える。
(もっと読む)
移動装置、移動方法およびプログラム
【課題】周辺に存在する対象物の状態に応じた合図でロボットの行動を認識させる。
【解決手段】移動装置100は、移動方向を示す方向指示部106と、周辺に存在する対象物の状態を認識する認識部102と、認識部102により認識された対象物の状態に応じて、方向指示部106により示される方向を制御する制御部104と、を備え、認識部は102、対象物と移動装置100との距離または対象物の移動速度を認識し、認識部102により認識された対象物と移動装置100との距離が短いほど、制御部104は、移動装置100のより詳細な移動経路を示すように方向指示部106を制御する。
(もっと読む)
サービス提供装置、サービス提供プログラム及びサービスロボット
【課題】サービス対象者を適切に選択することを課題とする。
【解決手段】サービス提供装置1は、移動情報取得部2と、干渉判定部3と、サービス対象者選択部4とを有する。移動情報取得部2は、自装置を基準として規定される第1の領域に存在する複数の人の移動方向及び移動速度を取得する。さらに、干渉判定部3は、移動情報取得部2によって取得された複数の人の移動方向及び移動速度からそれぞれ推定される人の移動推定軌跡が第1の領域よりも小さく、かつ自装置を基準として規定される第2の領域へ干渉するか否かを判定する。サービス対象者選択部4は、自装置がサービスを提供するサービス対象者として、干渉判定部3によって移動推定軌跡が第2の領域へ干渉すると判定された人を選択する。
(もっと読む)
ロボットシステム
【課題】ロボットの作業範囲内まで物品を搬送する搬送車を備えるロボットシステムにおいて、作業者の安全を確保するとともに、ロボットの作業性の低下を抑制する。
【解決手段】ロボットシステムは、ロボットアーム23により作業を行うロボット20と、ロボット20の作業範囲(危険領域A2)内まで組付け部品31を搬送する無人搬送車30とを備える。ロボットシステムは、水平方向に走査してレーザ光を照射し、物体により反射されて戻るレーザ光に基づいて、ロボット20から物体までの距離を検出する領域センサ40a〜40dと、領域センサ40a〜40dにより検出される距離が、危険領域A2の半径(L2/2)よりも短いことを条件として、ロボット20に安全動作を実行させるコントローラと、無人搬送車30に設けられ、領域センサ40a〜40dから無人搬送車30へ照射されたレーザ光を上方へ反射させる反射ベルト32とを備える。
(もっと読む)
移動体遠隔操作システム、環境情報収集システム
【課題】直進運動と回転運動についてのバイラテラル制御を正確に行うことが可能な移動体遠隔操作システム等を提供すること。
【解決手段】人が操作を行う操作デバイスを有する操作システムと、前記操作システムに対してなされた人の操作に基づいて駆動される移動体システムと、を備え、前記操作デバイスには、前記移動体システムが環境から受けた反力を再現するためのアクチュエータが取り付けられ、前記操作システムと前記移動体システムとの間でバイラテラル制御が行われる移動体遠隔操作システムであって、前記操作デバイスには、直進運動指示と回転運動指示の双方を含む操作が可能となっており、前記バイラテラル制御の少なくとも一部において、直進運動と回転運動のそれぞれについて独立した演算を行うことを特徴とする、移動体遠隔操作システム。
(もっと読む)
1 - 20 / 244
[ Back to top ]