
Fターム[3C007KX05]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849)
Fターム[3C007KX05]の下位に属するFターム
手首に設けるもの (212)
ハンドに設けるもの (411)
腕又は手を囲むように配置したもの (28)
関節に設けるもの(手首、腕) (126)
Fターム[3C007KX05]に分類される特許
21 - 40 / 72
搬送装置及び搬送方法
【課題】収容物の出し入れを行う面を下側とし、その面のフラップの封止を行うことなく、かつ、収容物の脱落を防止しつつ箱体を搬送する。
【解決手段】開閉自在な左右一対のフラップ201を底面に有する箱体200の搬送装置であって、前記箱体200を保持する保持ユニット10と、保持ユニット移動手段とを備え、前記保持ユニット10は、前記箱体200の上面又は側面において前記箱体200を保持し、前記箱体200を昇降させる昇降手段11と、前記一対のフラップ201のそれぞれに当接し前記フラップ201の開放を規制する一対の当接部材14と、前記一対の当接部材14が前記箱体の下方において互いに近接して前記フラップ201の開放を規制する開放規制位置と、前記一対の当接部材が前記箱体の下方において互いに離間して前記フラップの開放を許容する開放許容位置と、の間で前記一対の当接部材を移動させる当接部材開閉作動手段12とを備えた。
(もっと読む)
ロボット

【課題】ロボットの可搬能力を維持しながらも精度良く外力を制御することができるようにした、ロボットを提供することを目的とする。
【解決手段】複数の関節部を有するアームと、アームを形成し、荷重を支持するアーム構造材と、複数の関節部を駆動させるとともに、アーム構造材に支持されるアクチュエータと、アーム構造材の部材内部に埋設され、当該アーム構造材にかかる荷重を測定する荷重センサと、荷重センサの検出結果に基づいて、アクチュエータの動作を制御するコントローラと、荷重センサからコントローラに接続されるセンサラインをアーム構造材の部材内部からアームの内部空間側に導入する配線孔と、を備えて構成する。
(もっと読む)
カメラ付きロボット
【課題】 ロボットアームに搭載されるカメラのシャッターチャンスを最適化し、組立作業効率を向上させる。
【解決手段】 フィンガー4上の点Fと、カメラ1の位置基準であるアライメントマーク3aに対する位置をカメラ1によって撮像し、画像処理によってカメラ1の位置を計測する。カメラ1の位置が予め設定された位置閾値以下で、かつ、カメラ1に搭載された速度センサ3によって計測されるカメラ1の移動速度が予め設定された速度閾値以下である時にカメラ1のシャッターを切る。あるいは更に、速度センサ3の微分値によって計測されるカメラ1の移動加速度が予め設定された加速度閾値以下である時と論理積を取ってシャッター切る。これによって、ワーク12を探索するための画像のブレを防ぎ、位置誤差を低減するとともに、シャッターを早く切ることで作業効率を向上させる。
(もっと読む)
搬送ロボット装置および搬送ロボット装置の制御方法
【課題】慣性力および振動により液体などの搬送物がこぼれない搬送ロボット装置を提供する。
【解決手段】移動体と、移動体に設けられたアーム部と、アーム部を動作させるアクチュエーターと、アーム部の先端に取り付けられ搬送物が載置される搬送物載置部と、を有する搬送ロボット装置1であって、搬送物載置部の姿勢およびアーム部の振動を制御するためにアクチュエーターの動作を制御する制御部40と、搬送物載置部の加速度を検出する加速度検出部20と、アーム部の振動を検出する振動検出部30と、を備え、加速度検出部20にて検出された信号に基づいて搬送物載置部の姿勢を制御し、振動検出部30にて検出された信号に基づいてアーム部の振動を制御する。
(もっと読む)
ロボット制御装置、ロボットの制御方法
【課題】ロボットの制御を可能にするロボット制御装置を提供する。
【解決手段】ロボット制御装置は、基体1に対して回転運動可能なリンク3と、リンク3を駆動するモーター4と、モーター4のトルクをリンク3に減速比Nで伝達する減速機5と、モーター4の回転角θM1を検出する角度センサー6と、基体1に対するリンク3の角速度ωL1を検出する角速度センサー12と、角速度ωL1の積分値のうち第1の周波数fH以上の高周波成分、及びθM1*Nのうち第2の周波数fL以下の低周波成分を用いリンク3の回転角を算出する演算部15と、を備え、第1の周波数fHと第2の周波数fLとが異なる。このことによって、角速度センサー12のバイアスドリフトの影響を排除し、特定の周波数を強調したり除去した角度の信号を得ることができる。
(もっと読む)
ロボットの制御装置、及びロボットの制御方法
【課題】慣性センサー信号の遅延に起因する振動発生を抑制する。
【解決手段】ロボット制御装置は、基体に対して回転可能なリンクとしてのアーム40、アーム40を駆動するアクチュエーターとしてのモーター20と、モーター20のトルクをアーム40に減速非Nで伝達する減速機構60と、前記リンクによって回転されるアームと、前記アクチュエーターの回転角度θmを検出する角度センサーと、前記アームの回転角度θaを検出する慣性センサーと、を備えるロボット制御装置の制御方法であって、
前記慣性センサー信号の遅延量を前記ロボットの機構モデル系の運動方程式に加えてフィードバックゲインを設定し、前記慣性センサー信号の遅延に起因する前記リンクの振動を抑制することを特徴とするロボットの制御装置。
(もっと読む)
ロボット、搬送装置、及び慣性センサーを用いた制御方法
【課題】慣性センサーの出力の誤差によって制御装置が情報を誤認識することで、正しい制御が損なわれることを抑制することができるロボット、搬送装置、及び慣性センサーを用いた制御方法を提供する。
【解決手段】搬送装置は、移動部と、移動部の駆動源と、駆動源の位置情報を出力する位置センサーと、移動部が移動させられる際の慣性力情報を出力する慣性センサーと、移動部の移動を規定する制御指令を出力する制御指令発生部と、を備える搬送装置であって、移動部の移動動作を制御する際に、慣性力情報を用いるか否かを決定する制御切替決定部と、制御切替決定部が慣性力情報を用いることを決定した場合には、制御指令、位置情報、及び慣性力情報に拠って第一の制御を実施し、制御切替決定部が、慣性力情報を用いないことを決定した場合には、制御指令、及び位置情報に拠って第一の制御とは異なる第二の制御を実施する動作制御部と、を備える。
(もっと読む)
ロボット、搬送装置、及び電力供給方法
【課題】回動又は摺動自在に支持された移動部に取り付けられた慣性センサーに電力を供給するための、回動又は摺動自在に支持する支持部を経由して基体から移動部に達する電力供給用のケーブルや、発電用の動力を伝達する動力伝達機構などを不要にすることができるロボット、搬送装置、及び電力供給方法を提供する。
【解決手段】ロボット20は、一端に作業端末を支持しもう一端を回動自在に支持されたアーム21と、アームを回動させるための駆動源と、アームに取り付けられておりアームが回動する角速度を検出してアームの角速度情報を出力する慣性センサー32と、アームに取り付けられており慣性センサーに電力を供給する発電装置40と、発電装置で発電した電力を蓄える二次電池52と、を備える。発電装置は、アーム21の運動エネルギーによって駆動される発電機、または太陽電池であり、センサの近傍に設ける。
(もっと読む)
ロボット
【課題】駆動部や腕部が振動するときにも角速度検出部が振動し難いロボットを提供する。
【解決手段】第1腕部8と、第1腕部8を回転させる第1モーターと、第1腕部8が回転する角速度を検出する第1角速度センサー26と、第1腕部8から第1角速度センサー26に伝わる振動を減衰させる減衰容器23及び減衰容器蓋部23aと、を有する。そして、減衰容器23及び減衰容器蓋部23aは減衰部材を有し、減衰部材が第1腕部8と第1角速度センサー26との間に配置される。
(もっと読む)
角速度または角度の検出方法及びロボットの制御方法
【課題】ドリフト現象による誤差と感度の変動による誤差とを較正する方法を提供する。
【解決手段】角速度センサーを用いた角度検出方法にかかわる。角速度センサーの姿勢を第1姿勢から第2姿勢へ変更し、その間の角速度センサーの出力を積分した第1出力積分16aと変更に要した第1経過時間17とを検出する。角速度センサーの姿勢を第2姿勢から第1姿勢と同じ姿勢の第3姿勢へ変更し、第1姿勢から第3姿勢13へ変更する間の角速度センサーの出力を積分した第2出力積分16bと第1姿勢から第3姿勢へ変更する間の第2経過時間18とを検出する。第2出力積分16bを第2経過時間18にて除算してオフセット補正係数を演算する。第1出力積分16aからオフセット補正係数と第1経過時間17との乗算値を引き算した第1正味出力積分19aを演算し、第1姿勢と第2姿勢との回転角度の差を第1正味出力積分19aにて除算して感度係数を演算する。
(もっと読む)
ロボットアーム、及びその制御方法
【課題】制御性の高いロボットアーム、及びその制御方法を提供すること。
【解決手段】本発明にかかるロボットアームは、冗長性を有するロボットアームであって、肘部16よりも本体部側に設けられた力センサ31と、力センサ31からの出力に応じて、ロボットアームに設けられた関節を制御する制御部13と、を備え、制御部13が、インピーダンスモデルを用いて、力センサ31からの出力に応じた肘旋回角を算出し、逆運動学を用いて、肘部16を肘旋回角に基づいて肘旋回角周りに旋回させるよう、関節を制御する、ものである。
(もっと読む)
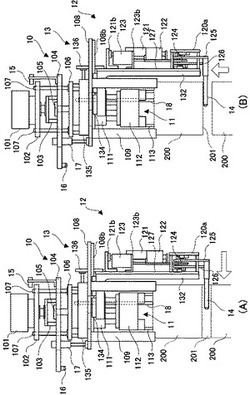
産業用ロボット
【課題】ロボット、特にエンドエフェクタの位置決めにかかる自由度を高く維持しつつ、ロボット自身の設置にかかる自由度をも高めることのできる産業用ロボットを提供する。
【解決手段】水平多関節型ロボットには、第2のアーム15に対して上下方向に直線移動可能な伸縮回転軸16が設けられている。伸縮回転軸16は、入れ子式の複数の筒体16A〜16Fが振出し可能に連結されてなる伸縮ポール形状に形成されていて、その最も内側の筒体16Fの先端部17にエンドエフェクタが設けられている。最も外側の筒体16Aが第2のアーム15に対して固定されるとともに、最も内側の筒体16Fが第2のアーム15内で伸縮駆動装置20により送り出し/引き込み駆動されるドライブコード25に連結され、該ドライブコード25の送り出し量もしくは引き込み量に応じてエンドエフェクタが位置決めされる。
(もっと読む)
作業装置及びその校正方法
【課題】作業装置が有する作業部と距離測定部との校正用パラメータを、非接触かつ自動的に取得する。
【解決手段】作業部を作業位置へ移動させる移動部と、移動部に設置されて作業部とともに移動する距離情報取得部と、移動部とは独立して固定された撮像装置とを有する作業装置は、撮像装置における画像平面上に仮想目標点を設定し、撮像装置によって撮影された画像において作業部の作業基準点と仮想目標点とを一致させるための移動部の座標を複数取得する。また、作業装置は、画像において、距離情報取得部の投光位置と仮想目標点を一致させる移動部の座標と、その座標位置において距離情報取得部から得られる距離情報とを複数取得する。そして、作業装置は、上記処理で取得された複数の座標及び距離情報に基づいて、移動部と距離情報取得部のための校正用パラメータを算出する。
(もっと読む)
ロボットシステム
【課題】組立嵌合作業の教示の負担を軽減すると共に、嵌合作業の精度を向上させ作業を効率化でき、教示作業時と再生運転時の環境の変化に対するロバスト性を上げることが可能なロボットシステムを提供する。
【解決手段】ロボットコントローラ102は、暫定的に教示されたワーク把持点および嵌合点、ワーク把持点と嵌合点との間の経由点の各位置と、ワーク把持点および嵌合点におけるエンドエフェクタ104の姿勢と、ロボット101周辺に存在する障害物の位置とから障害物を回避して嵌合を行う作業プログラムを生成し、教示データ記憶部1023に記憶させる姿勢演算部1024を備える。
(もっと読む)
ダブルボールバー
【課題】長手方向の長さを任意の長さに変更しても、変更した長さにて変位量の測定に必要な分解能を確保できるダブルボールバーを提供する。
【解決手段】工作機械の各軸の誤差の測定に用いるダブルボールバーであって、長手方向に伸縮可能に構成されたアーム部(基準アーム部61、伸縮アーム部62)の両端部に球体ジョイント部を備え、被測定部に向けて出射したレーザ光の反射光を検出して被測定部までの距離を測定するレーザ測定手段64が用いられており、基準アーム部または伸縮アーム部の一方には、レーザ測定手段64が設けられ、他方にはレーザ光を反射する反射面M63を備えたレーザ反射部材63が設けられている。レーザ反射部材またはレーザ測定手段の少なくとも一方は、取り付けられている基準アーム部または伸縮アーム部に対して着脱可能であるとともに長手方向において任意の位置に固定可能に構成されている、ダブルボールバー60。
(もっと読む)
ロボットアーム及びロボットアーム装置
【課題】ロボットアームに加わる衝撃力を緩和する装置を製作する際に、その装置を構成する部品の加工時間や、それらの部品を組み立てたり、調整したりする時間がかかるという課題がある。
【解決手段】ロボットアーム3は、軸Aの方向に直列に並ぶ2つのアーム部分30,31と、2つのアーム部分30,31を連結する連結部と、軸Aの方向の力を検出するセンサとしての圧電素子62と、圧電素子62の電気的変化を検出し、信号を出力する検出回路と、信号によって電源回路を遮断する遮断回路と、電源回路に接続され、電圧の変化によって伸縮する電歪ポリマー63と、電歪ポリマー63を包んだ状態で外形形状が変化する包装部64と、を備え、包装部64の軸Aの方向と直交する両側の面K1,K2が、2つのアーム部分30,31のうちの一方のアーム部分と、他方のアーム部分または連結部に当接して備えられる。
(もっと読む)
多関節マニピュレータの先端位置制御方法および多関節マニピュレータ
【課題】多関節マニピュレータの先端を所定の位置に精度よく位置制御することのできる多関節マニピュレータの先端位置制御方法を提供する。
【解決手段】軸回りに回転する複数の関節軸2,4と、これらの関節軸2,4からその径方向に延伸する複数のアーム1,3とを備えた多関節マニピュレータ5の先端を位置制御する方法であって、アーム1,3の各先端部に装着されたジャイロセンサ9,10の出力から関節軸2,4の回転角度と回転速度を求めて多関節マニピュレータ5の先端を位置制御するようにした。
(もっと読む)
ロボットアームの教示システム及び方法
【課題】冗長自由度を有するロボットアームに対する教示において、簡便な教示作業により、アーム全体の軌道を詳細に教示できるようにする。
【解決手段】本発明に係るロボットアームの教示システムは、アーム2の手首部11に搭載された第1の力センサ15と、前記アーム2の肩部13に搭載された第2の力センサ16と、教示者が前記アーム2の手先部A及び肘部Bを把持して前記アーム2を動かした時に得られる前記第1及び第2の力センサ15,16の検出信号に基づいて、前記アーム2の軌道を生成する演算装置3とを備える。
(もっと読む)
ロボット及びロボットシステム
【課題】可動部の場所を短時間に検出できるロボットを提供する。
【解決手段】可動部を有するロボットであって、可動部に配置され超音波信号を発信する複数のロボット用超音波タグ13と、ロボット用超音波タグ13が発信した超音波信号を受信する3個以上のロボット用超音波受信装置19と、複数のロボット用超音波受信装置19が受信する超音波信号の到達時間を用いてロボット用超音波タグ13の場所を検出する発信位置演算部と、を有し、発信位置演算部は検出した複数のロボット用超音波タグにおける場所の情報から前記ロボットの姿勢を検出する。
(もっと読む)
アーム位置調整方法及び装置並びにロボットシステム
【課題】
アームのたわみ等による位置のずれをより精度良く解消できるようにした、アーム位置調整方法及び装置並びにロボットシステムを提供する。
【解決手段】
回転駆動するアクチュエータ20を有する関節部とこれに連結されるフレーム部材とを有するアームと、アクチュエータ20を制御する制御装置とを有するロボットにおいて、関節部の実際の角度を取得し、制御装置から関節部に与えられる指令角度と関節部の実際の角度とのずれ量を求め、アームの関節部に作用する関節トルクを求め、求めた関節トルクと求めたずれ量とに基づいて関節部のばね定数を算出し、算出したばね定数に基づいて、制御装置から関節部に与えられる指令角度を補正する。
(もっと読む)
21 - 40 / 72
[ Back to top ]