
Fターム[3C007KX05]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849)
Fターム[3C007KX05]の下位に属するFターム
手首に設けるもの (212)
ハンドに設けるもの (411)
腕又は手を囲むように配置したもの (28)
関節に設けるもの(手首、腕) (126)
Fターム[3C007KX05]に分類される特許
41 - 60 / 72
真空用接触センサ
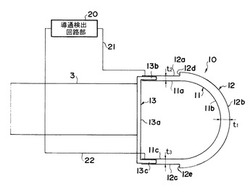
【課題】構成簡易ながら検知範囲を広く設定し得る上に死角が少なく、かつ接近感知部を軽量とすることが可能な真空用接触センサを得る。
【解決手段】接近感知部10は、互いに接触または近接すると電気的に導通するように構成された可撓性を有する第1および第2の導電性薄板11,12を、内外方向に互いに離間した状態でアーチ状に湾曲形成してなるものであり、マニピュレータ3の先端表面部の全域を覆うように配置されている。マニピュレータ3が他物体と衝突する前に接近感知部10が他物体に当接して変形し、第1および第2の導電性薄板11,12が互いに接触または近接して電気的に導通したことを導通検出回路部20が検出することにより、マニピュレータ3が他物体と接近したことを検知する。
(もっと読む)
腕運動支援装置

【課題】 従来までの上半身の動きを補助するための装置においては、前記補助装置を利用する際、利用者は自身の腕を前記補助装置に固定する必要があり、前記装置の利用者は、前記装置の装着時に違和感を感じることを余儀なくされていた。
【解決手段】 本発明は、利用者の上腕部分および前腕部分を支える、アルファベッドの「U」のような形などをした支持体を有し、前記前腕部分の支持体に、かまぼこ型状でありその表面が滑りやすい材質からなるセンサーを備えた腕運動支援装置である。
(もっと読む)
作業装置及びその校正方法
【課題】画像計測時にマーカの中心部を含む部分が遮蔽されていても作業部の位置の校正を行うことを可能とする。
【解決手段】作業装置は、被作業物体に対して作業を行う作業部と、マーカ中心点から放射状に複数のマーカが配置された校正治具とを有し、複数のマーカは、立体的に配置されており、校正治具は、作業部に対して設定された校正用の基準点とマーカ中心点とが一致するように作業部に装着されている。
(もっと読む)
自動試験装置
【課題】Z軸方向に所定の負荷をかける機器の試験を行う自動試験装置において、Z軸方向へ所定の負荷をかける加重制御の管理可能な加重の幅を広くする。
【解決手段】X軸方向、Y軸方向、Z軸方向にそれぞれ移動するX軸移動ユニット2、Y軸移動ユニット3、Z軸移動ユニット4を備えた自動試験装置において、前記Z軸移動ユニット4に固定されX軸方向の下方に延びたアーム404の下端部に取り付けられた加重制御ユニット401と、前記加重制御ユニットの下側に取り付けられた作用子402を備え、前記加重制御ユニット401は、前記上側固定板401aに設けられた孔401eに上側固定板401aには摺動自在となるように貫設し、上部に前記下側稼動板401bの下方向の移動を係止する係止部を具備した圧縮バネ案内軸401dと、前記圧縮バネ案内軸401dに案内される圧縮バネ401cから構成されている。
(もっと読む)
入力装置、制御装置、入力方法、制御方法ならびに、プログラム
【課題】ユーザが押圧操作によって正負の値や方向を直観的に入力できるようにする入力装置等を提供する。
【解決手段】入力装置101において、センサ部102は、ユーザによる押圧の強さを検知し、判断部103は、押圧の強さが第1閾値以上である期間が第1閾時間連続して以降、第2閾値以下である期間が第2閾時間連続するまでの出力期間であるか否かを判断し、取得部104は、出力期間が開始したと判定されると、当該出力期間の開始時点に先行する第3閾時間の期間に検知された押圧の強さの平均を基準値として取得し、出力部105は、出力期間であると判定されている間、検知された押圧の強さから基準値を減算した結果を、指示値として出力する。センサ部102を移動体の表面に貼付し、指示値が正のときにセンサ部を押す方向に、負のときにセンサ部を引く方向に移動体を移動させれば、直観的な移動体の位置操作が可能となる。
(もっと読む)
マニピュレータおよびロボット
【課題】機構や制御アルゴリズムを単純にしつつも、様々な形状の物体を確実に把持することができるマニピュレータを提供する。
【解決手段】複数の関節軸111,112,113及び複数のリンク131,132,133を有し、複数の関節軸111,112,113の回転角が一定の関係を保つように複数のリンク131,132,133が連動して閉じる方向に動く指1と、指1と対向して配置され、複数の関節軸211,212,213及び複数のリンク211,212,213を有し、複数のリンク231,232,233のうち根元側のリンク231から順に閉じる方向に動き、且つ根元側のリンク231が物体に接触すると、根元側のリンク231に隣り合うリンク232が閉じる方向に動く指2と、指1及び指2を駆動する駆動源100,200を備える。
(もっと読む)
ダイレクト操作装置および配電作業用ロボット
【課題】操作棒に無理な力が作用することなく、操作棒の作用力に倣う方向を維持したまま並進方向の操作力を正確に力センサに伝達することが可能となり、実際の配電作業での適用に耐える安全性の高いダイレクト操作装置を提供する。
【解決手段】ダイレクト操作装置2を、基部20と、基部20に固定された複数の雄コネクタ21と、雄コネクタ21のいずれか1個に接続固定される雌コネクタ22とから構成し、雌コネクタ22が雄コネクタ21の接続を検知する圧電スイッチを内蔵した接合部と、接合部に設けられる力センサ部と、力センサ部を介して立設された少なくとも2自由度の回転機構を備えたフック部とを備え、力センサ部がフック部の引き回しによる力を検知して制御装置10へ出力するようにした。
(もっと読む)
多軸ロボットの位置ずれ検知方法及び装置
【課題】簡単な構成でありながら、多軸ロボットの位置ずれを生じるような不具合が発生した部分を、正確かつ確実に把握する。
【解決手段】多軸ロボット12の位置ずれが生じる可能性のある各部位14、16、18に取付けられた、レーザーポインタの光軸を、多軸ロボット12から離間しかつ各投光手段から照射される光Lを受光することが可能な場所に設置された、標的22に合わせる。そして、多軸ロボット12に位置ずれが生じた場合には、多軸ロボット12を、位置ずれ検知用の基準位置に復帰させ、各レーザーポインタから順番に標的22に対し光Lを投光する。そして、各光軸のずれの有無を、標的22上の光点の位置によって目視で把握することにより、位置ずれの発生部位を正確に特定する。
(もっと読む)
AFMピンセット、AFMピンセットの製造方法および走査型プローブ顕微鏡
【課題】走査型プローブ顕微鏡において、高精度な観察と、安定した把持とを両立させることができるAFMピンセットの提供。
【解決手段】AFMピンセットは、三角柱部材の稜線の先端を走査型プローブ顕微鏡の探針として使用可能な第1のプローブ10Bと、第1のプローブ10Bに対して開閉自在に設けられた三角柱部材から成る第2のプローブ20Bとを備え、各三角柱部材の所定の周面がほぼ平行状態で対向するようにプローブ10B,20Bを並置した。そして、稜線の先端で試料を走査する際の試料との干渉を防止する切り欠き部100を、第1のプローブ10Bに形成した。
(もっと読む)
液晶搬送ロボットおよびその制御方法
【課題】本発明は、正確にガラス基板の位置を検出し、位置を補正して搬送する液晶搬送ロボットを提供する
【解決手段】リンク機構(1A、2A)からなる昇降機構(1C、2C)と、リンク機構(3A、4A)からなる水平多関節機構(3C、4C)と、前記水平多関節機構に矩形形状の基板Wを載置するハンド部9と、前記昇降機構(1C、2C)に備えられた走行台車12からなる液晶搬送ロボット1において、前記ハンド部9と前記水平多関節機構(3C、4C)の間にコラム8が備えられ、前記コラム8に前記基板Wの位置を検出するセンサ10が備えられたものである。
(もっと読む)
液晶搬送ロボットおよびその制御方法
【課題】本発明は、正確にガラス基板の位置を検出し、位置を補正して搬送する液晶搬送ロボットを提供する
【解決手段】リンク機構(1A、2A)からなる昇降機構(1C、2C)と、リンク機構(3A、4A)からなる水平多関節機構(3C、4C、5C、6C)と、前記水平多関節機構に矩形形状の基板Wを載置するハンド部9とからなる液晶搬送ロボット1において、前記ハンド部9と前記水平多関節機構(3C、4C、5C、6C)の間にコラム8が備えられ、前記コラム8に前記基板Wの位置を検出するセンサ10が備えられたものである。
(もっと読む)
ワーク搬送システムおよびワーク搬送方法
【課題】ワークとハンドとの相対位置が一定にならない場合でも、この把持したワークの位置や姿勢を高精度で制御できるワーク搬送システムを提供すること。
【解決手段】組立てシステム1は、ミラー60を把持するハンド121と、このハンド121の位置および姿勢を変化させるアーム122と、把持されたミラー60をセンシングして、このセンシングしたデータを出力する第2のマニピュレータ13と、これらを制御する制御部70と、を備える。制御部70は、ミラー60の搬送経路についてのティーチングデータを予め記憶しておき、センシングデータに基づいて、ミラー60の位置および姿勢を実測データとして生成し、ミラー60の搬送中、ティーチングデータと実測データとを照合してずれ量を算出し、この算出したずれ量に基づいて、ミラー60の位置および姿勢がティーチングデータに略一致するように、アーム122を制御する。
(もっと読む)
基板搬送装置、基板搬送モジュール、基板搬送方法及び記憶媒体
【課題】冷機状態、暖機状態の区別なく、運転再開後直ぐに本来の搬送精度で基板の搬送を行うことができ、基板間における処理について高い均一性が得られる基板搬送装置等を提供する。
【解決手段】
基板を保持する保持部13に回転自在にアーム部11、12が連結された関節型の搬送アーム10a、10bを備えた基板搬送装置1a、1bにおいて、加熱手段61a、61bは当該アーム部11、12を加熱し、温度検出手段64a、64bは各アーム部11、12の温度を検出する。そして制御手段7は、基板搬送開始前に前記アーム部11、12を加熱し、温度検出手段64a、64bによる温度検出値が予め設定した設定温度範囲まで上昇した後に基板の搬送を許可し、その後は温度検出値が設定温度範囲内に維持されるように加熱手段61a、61bを制御する。
(もっと読む)
接触式変位作動装置システム
少なくとも人体の一部分に近似し、少なくとも人体の一部分に連結可能である形状にされ、人体の動きを模倣するように構成されたロボット骨組に使用されるロボット変位装置。この装置は、センサと人間の操作者の四肢との間において、基準線を制御する界接面の力の状態の関係を検出する、ロボット骨組に取り付けられた複数の力センサを用いる。センサから出力された力の信号、およびロボット骨組に対する重力の力および方向に基づいて、計算システムが、少なくとも、制御する力の状態の関係を維持するのに必要である回転力を計算する。次に、計算システムは、作動信号を発生して、制御する力の状態の関係を維持するためにロボット骨組の一部分を変位させる、ロボット骨組に取り付けられた駆動システムに送信する。  (もっと読む)
(もっと読む)
ロボット装置及び形状認識方法
【課題】腕部を有するロボットにおいて、周囲環境に依存しない方法で把持対象物の三次元形状の認識を行うロボット装置を提供すること。
【解決手段】本発明の一態様に係るロボット装置10は、頭部11と、頭部11に連結された腕部13と、腕部13に設けられ、ワークWの上面を撮像する手先カメラ15と、頭部11に設けられた頭部カメラ12と、手先カメラ15によって撮像したワークWの画像に基づいて、手先カメラ15の移動経路を計画する算出部とを有し、移動経路に沿って移動する手先カメラ15によって撮像された画像と、頭部カメラ12によって撮像された画像とに基づいてワークWの三次元形状を認識するものである。
(もっと読む)
半導体製造用搬送装置
【課題】ワークストック等の搬送元、搬送先の装置の出し入れが狭い環境であっても、迅速、確実にワークを搬送する半導体製造用搬送装置を提供する。
【解決手段】駆動部を格納する本体部2と、回動中心30、40、50を中心として水平方向に回動自在に取り付けられた第1アーム3、第2アーム4、第3アーム5と、ワークを吸引する吸引口64,65を設けた爪62、63を有するハンド部6と、開口部51内にハンド部後端61を支持するスライド部とを備え、ワークストックの棚に差し込んだワークを出し入れする。また、ワーク検出センサ52を備え、ハンド部6が第3アーム5へ後進したときにワークの有無を検出する。
(もっと読む)
触覚センサ、触覚センサの製造方法および触覚センサユニット
【課題】外圧の大きさおよび方向を高感度で検出することができるとともに製造が容易な触覚センサ、およびその製造方法ならびに触覚センサユニットを提供することである。
【解決手段】触覚センサ100は、カンチレバーCLおよびエラストマー層105を有する。カンチレバーCLは、ノンドープ層103aおよびドープ層103bを有する。ドープ層103bの格子定数はノンドープ層103aの格子定数より小さい。これにより、カンチレバーCLは湾曲している。ドープ層103bは、結晶シリコン膜にホウ素を添加することにより形成されている。エラストマー層105に外圧が加わることにより、カンチレバーCLが変形する。カンチレバーCLが変形することにより、ドープ層103bのピエゾ抵抗が変化する。したがって、ドープ層103bのピエゾ抵抗の変化を検出することにより、触覚センサ100に作用する外圧の大きさおよび方向を検出することができる。
(もっと読む)
パワーアシスト装置およびセンサ
【課題】操作者に密着させずに済み、調整も容易なパワーアシスト装置用のセンサ、およびこのセンサを組み込んだパワーアシスト装置を提供する。
【解決手段】脚部35の上端に関節部を介して一端側が回動自在に連結され、操作者の上腕が挿入可能な第1の外装部46と、第1の外装部46と関節部を介して連結され、操作者の前腕が挿入可能な第2の外装部48と、第2の外装部48と関節部を介して連結され、操作者の手が挿入可能な第3の外装部50と、第1の外装部、第2の外装部および第3の外装部のそれぞれを関節部を中心として回動させる複数のアクチュエータ38a,38b,38cと、各外装部内に設けられ、操作者の腕または手によって押圧されて変形する複数の押圧検出センサ52と、いずれかの押圧検出センサ52の変形を検出した場合に、外装部を押圧により変形した距離だけ移動させるように各アクチュエータを制御する制御部78とを具備する。
(もっと読む)
パワーアシスト装置
【課題】操作者への取り付けおよび取り外しを容易に行うことができるパワーアシスト装置を提供する。
【解決手段】上腕が挿入可能な第1の外装部46と、第1の外装部46と関節部を介して連結され、前腕が挿入可能な第2の外装部48と、第2の外装部48と関節部を介して連結され、手が挿入可能な第3の外装部50と、第1の外装部、第2の外装部および第3の外装部のそれぞれを関節部を中心として回動させる複数のアクチュエータ38a,38b,38cと、各外装部の内壁面に、腕および手を拘束しないように設けられた複数のセンサ52と、操作者の腕または手が外装部44内で移動したことをセンサ52が検出した場合には、外装部44を腕または手の移動に追随させるように制御する制御部78とを具備し、各外装部44は、一方側が開口した断面コの字状に形成されており、操作者の腕および手の挿入・抜き出しを開口部から行うことができるように形成されている。
(もっと読む)
移動型ロボットシステムにおけるマニピュレータ遠隔操作方法
【課題】障害物の3次元形状や大きさを視認して遠隔移動型ロボット操作において障害物の除去や回避する行動ができるようにした遠隔操作ロボットシステムを提供することにある。
【解決手段】カメラと距離計測装置を備えたマニピュレータを設置した移動型ロボットシステムのマニピュレータを操縦システムにより遠隔操作する方法であって、表示装置に表示されたカメラ画像を見ながら少なくとも障害物がカメラ画像内に映し出されるようにマニピュレータを遠隔操作する操作過程と、該操作過程で映し出された少なくとも障害物についての3次元形状を前記距離計測装置により計測する計測過程とを有することを特徴とする。
(もっと読む)
41 - 60 / 72
[ Back to top ]