
Fターム[3C007KX11]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 脚に設けるもの (125)
Fターム[3C007KX11]の下位に属するFターム
足(足首より先)に設けるもの (86)
関節に設けるもの (7)
Fターム[3C007KX11]に分類される特許
1 - 20 / 32
画像認識装置、装着型ロボット、及び画像認識プログラム
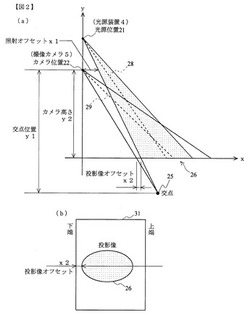
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
触覚センサシステム

【課題】触覚センサの配置密度が部位毎に異なるロボットに、触覚センサからの出力信号を情報統合装置へ中継する中継装置を配置するに際し、中継装置の好適な配置態様を提供する。
【解決手段】ヒューマノイドロボット1の触覚センサシステム100は、ヒューマノイドロボット1のロボット本体2の表面に配置された複数のセンサノード200と、複数のセンサノード200から出力された出力信号を中継する中継部401を有するリレーノード120と、リレーノード120の中継部401によって中継された出力信号を受信して処理するホストノード140と、を備える。複数のセンサノード200をヒューマノイドロボット1のロボット本体2の部位に応じて少なくとも2つ以上の区分に区分し、各区分毎に、リレーノード120を配置した。
(もっと読む)
歩行状態表示システム等
【課題】対象者の歩行状態を的確に把握可能な歩行状態表示システム等を提供する。
【解決手段】本発明は、歩行にともなう重心変動と脚部の関節角度の変動を計測し、前記計測された重心変動、関節角度の変動、及び歩行によって変化しないユーザの人体情報に基づいて前記ユーザの歩行動作を示す指標を演算し、前記指標を表示する。
(もっと読む)
ロボットの接触種類判別システム
【課題】簡単な構成で接触の種類を判別することができるロボットの接触種類判別システムを提供する。
【解決手段】本発明に係るロボットの接触種類判別システム100は、ロボット1への接触によって外力が作用する際に、接触の種類を判別する接触種類判別システムである。接触種類判別システム100は、ロボット1に搭載された、外力の力学特性を示す3軸方向以上の成分を検出する第1の検出部110と、第1の検出部110の検出結果に基づいて特徴量を算出する特徴量算出部152と、特徴量と予め接触の種類に対応するように取得したサンプル特徴量とをパターンマッチングし、ロボット1への接触の種類を判別する接触種類判別部153と、を備える。
(もっと読む)
脚式移動ロボットの歩容生成装置
【課題】複数の接触対象面からロボットに外力が作用する状況でのロボットの目標歩容を生成する場合に、ロボットに作用させるべき外力に関する目標を効率よく適切に決定する。
【解決手段】ロボット1の動作環境の複数の接触対象面FL,WL1,WL2を仮想面S3a,S2a,S2bで近似し、ロボット1全体の目標運動のうちの並進運動を実現するために、仮想面S3a,S2a,S2bからロボット1に作用させるべき並進力(仮想面必要並進力)の暫定値を決定する。さらに、ロボット1全体の目標運動のうちの回転運動を実現するために、仮想面必要並進力の暫定値と組み合わせるモーメント補償量を決定し、この仮想面必要並進力の暫定値とモーメント補償量との組に基づいて各接触対象面からロボット1に作用させるべき目標外力及び目標外力作用点を決定する。
(もっと読む)
着地タイミング特定装置及び歩行補助装置
【課題】第1脚に装着する装具が備えられたセンサのみで、第2脚の着地タイミングを特定する着地タイミング特定装置を提供する。
【解決手段】歩行補助装置10は、反力センサ22と加速度センサ34とタイミング特定部42を備える。反力センサ22は、脚装具12を装着する第1脚の足裏に加わる接地反力を検出する。加速度センサ34は、第1脚の大腿部の鉛直方向加速度を検出する。タイミング特定部44は、検出された接地反力が予め定められた反力閾値を横切る反力タイミングと検出された加速度が予め定められた加速度閾値を横切る加速度タイミングを特定するとともに、それらのタイミングに基づいて第2脚の着地タイミングを特定する。
(もっと読む)
案内用ロボット及びその制御方法
【課題】案内用ロボットの一部を把持している被案内者からの入力に応じて、案内用ロボットを移動させることが可能な、案内用ロボット及びその制御方法を提供する。
【解決手段】基体を移動するための駆動力を発生する移動用アクチュエータ62と、移動用アクチュエータ62の駆動を制御する移動用アクチュエータ制御手段92と、基体へ取り付けられた把持部と、被案内者による把持部への入力を検出する入力値検出手段10を備えた案内用ロボットであって、移動用アクチュエータ制御手段92は、入力値検出手段10が検出した入力に応じて基体の目標速度を算出し、この算出した目標速度で基体が移動するように、移動用アクチュエータ62の駆動を制御する。
(もっと読む)
触覚センサを有するロボット
【構成】ロボット10は、たとえば、触覚インタラクションのために触覚センサ(58,76)を備えるコミュニケーションロボットである。ロボット10は、複数の姿勢領域のそれぞれに対応付けられた、動作データと触覚センサ出力データの関係を示す線形モデルを記憶している。ロボット10が運動する際には、ロボット10は動作データすなわち関節角度データを取得し、現在の姿勢領域に対応する線形モデルを選択し、当該線形モデルを用いて触覚センサ出力データを推定する。そして、ロボット10は、実際に取得された触覚センサ出力データから推定値を差し引くことによって、自己動作に起因するノイズを除去する。
【効果】自己動作に起因する触覚ノイズを除去することができる。
(もっと読む)
原点位置判定装置および脚車輪型ロボット、並びに原点位置判定方法
【課題】 原点位置の判定を自立状態で行うことができ、部品点数および重量の増加を抑制するのに好適な原点位置判定装置を提供する。
【解決手段】 脚車輪型ロボット100は、回転関節18の関節角度が所定角度に達したときにZ相パルス信号を出力するロータリーエンコーダ42と、上部リンク80の姿勢に応じて変化する姿勢検出信号を出力する上部姿勢センサ80aと、下部リンク82の姿勢に応じて変化する姿勢検出信号を出力する下部姿勢センサ82aと、回転関節18を回転駆動する関節モータ40とを備える。そして、上部姿勢センサ80aおよび下部姿勢センサ82aからの姿勢検出信号に基づいて粗関節角度を算出し、誤差2εの範囲で関節モータ40により回転関節18を回転させてロータリーエンコーダ42からZ相パルス信号を入力したときは、算出した粗関節角度および回転関節18の回転角度量に基づいて原点位置を判定する。
(もっと読む)
車輪型ロボット
【課題】 小型化および軽量化を図り、段差に対して高い適応性を実現することができる車輪型ロボットを提供する。
【解決手段】 車輪型ロボット100は、基体10の上下方向にキャスタ31を伸縮駆動するキャスタ装置30と、キャスタ31が受けた床反力を検出する床反力検出部33とを備える。そして、感圧センサ33cからセンサ信号を入力し、入力したセンサ信号に基づいて、前部および後部のキャスタ31が受けた床反力FF、FBを算出し、算出した床反力FF、FBに基づいてリニアアクチュエータ32を制御する。
(もっと読む)
キャスタ装置および車輪型ロボット
【課題】 小型化および軽量化を図るのに好適なキャスタ装置を提供する。
【解決手段】 キャスタ装置30は、キャスタ31と、直動軸32aを有するリニアアクチュエータ32と、キャスタ31が受けた床反力を検出する床反力検出部33とを備える。キャスタ31は、従動輪31aと、従動輪31aを回転可能に支持し収容する車輪支持枠31bと、車輪支持枠31bの上部に取り付けられたキャスタ支持軸31cとを有する。そして、キャスタ支持軸31cおよび直動軸32aは、床反力検出部33を介して軸方向に連結されている。
(もっと読む)
走行ロボット
【課題】車体に複数の支持脚を備えると共に、各支持脚に個別に駆動する車輪を備えた走行ロボットであって、支持脚の運動機能と接地荷重の検出機能の両立を実現することができる走行ロボットを提供する。
【解決手段】少なくとも前輪W1の保持機構として、車体前後方向に回動可能な支持脚L1と、支持脚L1の下端部に回動自在に連結したアーム5と、アーム5に連結した車輪駆動用のモータ6を備えると共に、支持脚L1とモータ6との間に、車輪W1の接地荷重を検出するための荷重検出手段10を介装した走行ロボットR。支持脚L1の良好な運動機能を確保しつつ、接地荷重の検出を精度良く行う。
(もっと読む)
脚式移動体の操縦方法及び脚式移動体
【課題】脚式移動体に動作をティーチングしたり実際に運用するのに当たって、脚式移動体を操縦する必要がある場合に、感覚的かつ容易に脚式移動体を操縦すること。
【解決手段】本体3と移動用走行輪5とを接続する走行輪アーム7のアーム部71,73を、ロータリアクチュエータ75の回転により適宜個別に屈伸させることで、本体3の姿勢を変化させる脚式ロボット1において、本体3の上面3aに、マトリクス状に配置した複数の力センサU1〜U9を取り付け、接触操作に伴う外力を検出した力センサU1〜U9からの出力信号に基づいて、本体3の姿勢の変化方向を決定し、その方向に本体3の姿勢を変更するためのロータリアクチュエータ75,77の回転方向を決定して、その回転方向にロータリアクチュエータ75,77を回転させる。
(もっと読む)
倒立走行ロボット及びその制御方法
【課題】走行中に障害物等に衝突するなどの異常が発生しても速やかにリカバリー動作を実行することができる倒立車輪型移動体を提供すること。
【解決手段】倒立走行ロボット1は、車体11と、車体11に取り付けられた2以上の車輪15と、車輪15を補助する1以上の補助輪16と、倒立を維持するための安定化制御手段と、安定化制御手段が算出した制御量に応じて前記車輪を駆動する駆動手段と、補助輪16と当該補助輪16の地面との接地点との間に少なくとも1軸方向以上の圧力を計測できる1以上の感圧センサ17とを有し、安定化制御手段は、停止中及び走行中の感圧センサ17の値を監視し異常の有無を検知する。
(もっと読む)
制御システム及び制御方法、並びにロボット装置、並びにロボット装置
【課題】未知の環境をセンシングし、時々刻々と変化する周囲環境から適切な外力を得て、目的の作業が達成されるようにアクチュエータの発生力を調整する。
【解決手段】リンク構造物の力学モデルに作用する仮想的な力を算出する一方、リンク構造物と外界との接触部位を漏れなく検出して得られた接触情報を用いて、仮想的な力を実在可能な外力とアクチュエータ力に変換し、全アクチュエータの発生力目標値を決定する。また、算出したアクチュエータ力と、トルク・センサの検出したトルクの偏差が最小となるようにトルク・フィードバック制御を行ない、モデル化困難な力を補償する。
(もっと読む)
歩行ロボットの衝突検出装置および歩行ロボットの衝突検出方法
【課題】複雑な計算処理を要することなく、歩行ロボットの障害物との衝突を検出することができる加速度センサを用いた歩行ロボットの衝突検出装置および歩行ロボットの衝突検出方法を提供する。
【解決手段】遊脚判定部5は、現在時点が、歩行ロボットの脚の遊脚時か否かを判定する。衝突判定部6は、現在時点が遊脚時と判定された場合において、歩行ロボットの脚に取り付けた加速度センサ4a,4bの出力信号に基づいて、歩行ロボットと障害物の衝突を判定する。
(もっと読む)
リンク機構及び脚車輪型ロボット
【課題】リンクの可動範囲を十分に確保しつつ、各リンクの連結部の剛性を高めるのに好適なリンク機構、該リンク機構から成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1リンク17を、2つのリンク部材を間隙を空けて相対させ、その上端部において回転関節16で両持ちで支持し、下端部に略ボックス形状の第1のハウジング17cを一体形成する構成とし、屈曲時に、その間隙内に回転関節16の一部を進入可能な構成とし、第1のハウジング17cの上端部に傾斜面を設ける構成とした。更に、第1リンク17を回転関節16に対して回動限界位置まで屈曲させた状態で、更に回転関節14の回転軸周りに回動させたときに、第1股関節駆動部120の側面における第1リンク17が当接する位置に、該第1リンク17の当接部位がその回動方向に進入可能な切り欠き120bを設ける構成とした。
(もっと読む)
干渉判定装置および脚車輪型ロボット
【課題】 実際の干渉を伴うことなく干渉判定を行うことができ、部品点数および重量の増加を抑制し、干渉判定の制約を低減するのに好適な干渉判定装置を提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10に対して自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、レーザ28〜30およびカメラ32からなる物体センサとを備え、物体センサの測定結果に基づいて障害物の特徴点を検出し、グローバル座標系Pgにおいて、脚車輪型ロボット100の姿勢並びに基体10および脚すね部の形状により特定される脚すね部平面と、検出した特徴点との位置関係に基づいて、脚すね部に対して障害物が干渉するか否かを判定する。
(もっと読む)
リンク機構及び脚車輪型ロボット
【課題】リンクの可動範囲を十分に確保しつつ、各リンクの連結部の剛性を高めるのに好適なリンク機構、該リンク機構から成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1リンク17を、2つのリンク部材を間隙を空けて相対させ、その上端部において回転関節16で両持ちで支持し、下端部に略ボックス形状の第1のハウジング17cを一体形成する構成とし、屈曲時に、その間隙内に回転関節16の一部を進入可能な構成とし、第1のハウジング17cの上端部に傾斜面を設ける構成とした。更に、第2リンク19を、2つのリンク部材を間隙を空けて相対させ、その上端部を第1リンク17で両持ちで支持し、下端部に略ボックス形状の第2のハウジング19cを一体形成する構成とし、屈曲時に、第1リンク17の第1フレームの下端部を進入させる構成とし、第2のハウジング19cの上端部に傾斜面を設ける構成とした。
(もっと読む)
物体認識装置および物体認識方法
【課題】 脚型ロボットまたは脚車輪型ロボットの姿勢制御に好適で、かつ、測距センサを用いた2次元距離測定装置により物体認識を行う場合に認識精度を向上するのに好適な物体認識装置を提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10に対して自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、物体上の測定点までの距離を測定する測距センサ212aを備え、測距センサ212aを走査し、その走査範囲で測定可能な測定点について測距センサ212aの測定結果を取得し、取得した測定結果を直交座標系の座標に変換し、変換された少なくとも2つの測定点の座標に基づいてハフ変換により直交座標系における線分を検出し、検出した線分に基づいて物体上の連続面または連続面の境界を認識する。
(もっと読む)
1 - 20 / 32
[ Back to top ]