
Fターム[3C007MS15]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176) | 検査、監視、メンテナンス (114)
Fターム[3C007MS15]に分類される特許
1 - 20 / 114
ロボットのコントローラ
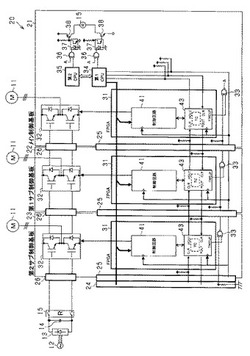
【課題】ロボットのコントローラにおいて、特別なハードウェアを追加することを抑制しつつ、被検出対象が異常であることをより確実に検出する。
【解決手段】ロボットのコントローラ20は、メイン制御基板21及び第1サブ制御基板22を備える。制御基板21,22の各FPGA31は、所定速度でカウントを行うタイムカウンタTCを有し、タイムカウンタTCの値に基づいて所定規則で1ビットの参照値及び信号値POUTをそれぞれ算出し、タイムカウンタTCの値が所定値になった時に、1ビットの信号値POUTの入力及び1ビットの信号値POUTの出力をそれぞれ行う。制御基板21のFPGA31は、信号値POUTが参照値と一致しないことを条件として異常であることを検出する。第1CPU34は、上記2つのタイムカウンタTCの値を一致させた後に、制御基板21のFPGA31に異常の検出を開始させる。
(もっと読む)
干渉チェック装置及びプログラム

【課題】ワークとロボットからなる複数の可動物体間の干渉をチェックして、干渉が発生する動作プログラムを自動で修正する。
【解決手段】取得手段21Aが、複数の可動物体の形状データ及び動作プログラムを取得する。モデル作成手段21Bが、形状データに基づいて、複数の可動物体モデルを作成する。シミュレーション手段21が、動作プログラムと可動物体モデルに基づいて、複数の可動物体モデルの動作をシミュレーションする。干渉判定手段22が、シミュレーション結果に基づいて、複数の可動物体モデル間の干渉の有無を判定する。回避動作設定手段25Aが、干渉する可動物体モデルの動作プログラムに干渉の回避動作を設定する。動作プログラム検証手段25Bが、回避動作を設定した動作プログラムの干渉の有無を判定させる。
(もっと読む)
マスタ操作入力装置及びマスタスレーブマニピュレータ
【課題】より故障に強い構成で操作部の位置・姿勢を検出することが可能なマスタ操作入力装置及びそのようなマスタ操作入力装置を備えるマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置の入力部に設けられた把持部の位置・姿勢の指令値を、把持部に取り付けられた関節の駆動量を検出するエンコーダの出力信号に基づいて算出するとともに、撮像センサで得られた画像に基づいて算出する。エンコーダの出力信号に従って算出された指令値と撮像センサで得られた画像に従って算出された指令値との間に所定以上の差がある場合にエラー処理を行う。
(もっと読む)
産業用ロボット用減速機
【課題】 即時の故障の予知を可能にすることができる産業用ロボット用減速機を提供する。
【解決手段】 減速機は、減速機本体と、減速機本体の潤滑油131aの劣化を検出するための潤滑油劣化センサ139aとを備えており、潤滑油劣化センサ139aは、白色の光を発する白色LED52と、受けた光の色を検出するRGBセンサ53と、潤滑油131aが侵入するための隙間である油用隙間40aが形成された隙間形成部材40と、白色LED52、RGBセンサ53および隙間形成部材40を支持する支持部材20とを備えており、隙間形成部材40は、白色LED52によって発せられる光を透過させ、油用隙間40aは、白色LED52からRGBセンサ53までの光路上に配置されていることを特徴とする。
(もっと読む)
ロボット
【課題】ロボットアームの機械部品の異常の有無を精度良く検出すること。
【解決手段】ロボット100は、アクチュエータAc2〜Ac15を有するアーム103L,103Rと、アーム103L,103Rの筐体の先端近傍に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ130と、センサ130の近傍に設けられ、センサ130の出力信号をデジタル信号に変換するA/D変換器とを有している。
(もっと読む)
減速機の異常判定方法、異常判定装置、ロボット及びロボットシステム
【課題】通常の作業用プログラムを実行しながら、産業用ロボットの駆動系の異常判定や寿命診断に用いるデータを精度良く、かつ簡便に抽出することのできる方法や装置を提供する。
【解決手段】ロボット8の動作プログラムに基づいて生成された位置指令Xsに従ってモータ12を制御するモータドライバ10からモータ12へ出力されるトルク信号Tfについて、トルク信号Tfから重力補償トルクおよびロボットの他の軸による干渉力トルクを除去した後にハイパスフィルタ34を適用し、抽出された減速機14の振動成分によって減速機14の異常を判定する。
(もっと読む)
ロボット監視システム
【課題】1つの画像記録ユニットのみを備えるロボット監視システムであっても、画像記録ユニットの故障を検出することを可能とする。
【解決手段】ロボット監視システムは、アーム11を有するロボット10と、アーム11の座標である第1座標を算出するとともに、アーム11の動作を制御するロボットコントローラ20と、ロボット10及びその周辺領域を撮像して画像を記録するカメラ装置30とを備えている。カメラ装置30は、記録される画像に基づいて、アーム11の座標である第2座標を算出し、第1座標と第2座標との比較に基づいて、ロボットコントローラ20及びカメラ装置30のいずれか一方が故障していると判定する。
(もっと読む)
ロボットシステム
【課題】ロボットの運転に際し、制御ユニット側からロボット側のエンコーダに対して適正な駆動電源を供給し、ひいてはエンコーダの検出性能を確保する。
【解決手段】ロボット10は、複数のモータ21〜26と複数のエンコーダ21a〜26aとを備えている。ロボット10と制御ユニット30とは電気ケーブル40を介して接続されており、それにはエンコーダ駆動電源を供給する電源ケーブル42が含まれている。制御ユニット30は、コントローラ31と電源回路32とを備えており、コントローラ31は、電源回路32で生成される電源電圧を、エンコーダ駆動に適した適合電源電圧に調整する。このとき、コントローラ31は、電源電圧を複数の段階で変更しながら設定し、電源電圧が設定された状態で、各エンコーダ21a〜26aの通信状況の良否を判定する。そして、通信状況が良好であると判定された時の電源電圧に基づいて、適合電源電圧を算出する。
(もっと読む)
ロボット及びロボットの異常判定方法
【課題】距離センサに異常があるか否かを判定することができるロボット及びロボットの異常判定方法を提供すること。
【解決手段】本発明にかかるロボットは、距離センサ15と、距離センサ15と離れて設けられた距離検出ユニット21とを備える。ロボットはさらに、距離検出ユニット21の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第1の距離検出手段と、距離センサ15の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第2の距離検出手段と、第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とを比較する比較手段と、前記比較手段の比較の結果、前記第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とが異なる場合に、距離センサ15が異常であると判定する異常判定手段とを備える。
(もっと読む)
ロボットの回転関節用配線装置
【課題】ロボットの回転関節により結合される2つの部材間の配線としてフレキシブルプリント配線板を用いた構成において、過電流が流れた部分をその継続時間にかかわらず特定可能にする。
【解決手段】
ロボットの相対回転する各部材間にて電気信号を伝達するためのFPC板14の延長部14b、14cは、中間部分で切断された後、それぞれポリスイッチ71〜74が搭載された基板61、ポリスイッチ75〜78が搭載された基板64を介して再接続される。熱感応シール60は、ポリスイッチ71〜78から離れたところに位置するFPC板14の延長部14aの表面におけるコネクタ33との接続部分に貼り付けられる。熱感応シール60は、全ての導電線27を覆うようにして配置される。熱感応シール60は、導電線27に過電流が流れたとき、その導電線27が発する熱により感応するように検知温度が設定されている。
(もっと読む)
外力検出インタフェースの故障検知方法
【課題】エンドエフェクタを力覚センサで可動体に固定した外力検出インタフェースの力覚センサの故障を検出する方法を提供する。
【解決手段】剛性を有するエンドエフェクタ10が力覚センサ25、26によって可動体30に拘束され、エンドエフェクタ10に作用する外力が力覚センサ25、26の応答値から算出される外力検出インタフェースの力覚センサの故障検出方法であって、応答チャンネルの数が冗長性を有する力覚センサ25、26でエンドエフェクタ10を可動体30に拘束し、正常な力覚センサの応答値ベクトルが取り得る超平面に外力検出時の力覚センサ25、26の応答値ベクトルを拘束したときの超平面上の理論値と、当該応答値ベクトルとの偏差を求め、この偏差の大きさに基づいて、誤った応答値を応答する力覚センサのチャンネルを特定する。また、誤差を含むセンサ応答値から正しい外力を推定することもできる。
(もっと読む)
搬送装置
【課題】シートが伸びたことを検知し、作業者に報知することができる搬送装置を提供する。
【解決手段】搬送装置1は、直動装置を構成するレール10及びスライダ20と、スライドユニット30と、可撓性のシートとを有する。スライドユニット30は、その移動方向に沿って、シートを収容し、スライドベース31と、方向転換部とを有する。スライドユニット30には、シートが所定の長さ以上の伸びを発現したときに該シートの過剰な伸びを作業者に報知する報知手段が設けられている。
(もっと読む)
ロボットシステム
【課題】嵌合・挿入作業において、様々な原因に依存する作業良否を正確に判定する。
【解決手段】特徴量抽出部113と特徴量履歴記録部114と作業良否・原因入力部115と作業良否・原因履歴記録部116と特徴量存在範囲算出部117と特徴量存在領域記録部123と作業良否判定部118と作業良否・原因表示部119とを備え、特徴量存在範囲算出部117は特徴量履歴記録部114と作業良否・原因履歴記録部116の2つの履歴データから、作業成功時の特徴量の存在範囲と作業失敗時の特徴量存在範囲を失敗原因ごとに算出して、各特徴量の存在領域を特徴量存在領域記録部123に記録し、当該特徴量存在領域に基づいて、作業良否判定部118は特徴量抽出部113から得られる作業実行時の特徴量がどの特徴量存在領域内にあるかによって作業良否と失敗時の原因を判定し、作業良否・原因表示部119はその判定結果を表示する。
(もっと読む)
ロボットシステム
【課題】センサ故障時のロボットの異常動作を防止する。
【解決手段】サーボモータ15の回転量を検出する第1の検出手段16と、ロボットアーム先端部に取り付けられ、ロボットアーム先端部の加速度aを検出する第2の検出手段17と、第1の検出手段16による検出値に基づきロボットアーム先端部の加速度a1を演算するとともに、この演算された加速度a1と、検出された加速度aとの偏差を演算する演算手段21と、演算手段21により演算された偏差の大きさが基準値αより大きいときに、サーボモータ15を非常停止する非常停止手段21〜23とを備える。
(もっと読む)
ロボット用事故解析システム
【課題】ロボットに発生した事故状態を客観的にとらえることができるロボット用事故解析システムを提供する。
【解決手段】ロボット2に発生した事故状態を再現するロボット用事故解析システムであって、ロボット2に設けられ、自ロボットの稼動状態情報を認識する稼動情報認識部と、ロボットとは別に設けられた撮像手段6によって撮像されたロボット2とその周辺環境との画像データを環境情報として認識する環境情報認識部とを有し、前記稼動状態情報と前記環境情報とを記録するロボット用レコーダ装置3と、ロボット用レコーダ装置3に記録された稼動状態情報及び環境情報に基づいて事故状態を再現するロボット用シミュレータ装置4とを備える。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】状況に応じて、3次元計測のためのパターン光の点灯及び非点灯を適切に切り替えることが可能なロボット装置及びロボット装置の制御方法を提供する。
【解決手段】外部の環境にパターン光を照射する照射部と、外部の環境を撮像して画像を取得する撮像部と、外部の環境を認識する外部環境認識部と、画像の取得状態に基づいて、パターン光の照射が必要であると判断したとき照射部を点灯に制御する照射判断部と、外部の環境に基づいて、パターン光の照射が不要である又はパターン光の照射を強制停止すべきであると判断したとき照射部を非点灯に制御する消灯判断部とを備える。
(もっと読む)
産業用ロボットの回転関節用配線装置
【課題】ロボットの高速動作に伴うフレキシブルプリント配線板の繰り返し曲げにより発生した導電線のマイクロクラックを適時のタイミングで把握する。
【解決手段】検査用FPC板14−2は、その板本体30−2及び検査用導電線27−2とも、主FPC板14−1の板本体30−1及び主導電線27−1と、同じ材質及び同じ形状をなす。検査用FPC板14−2は主FPC板14−1と厚み方向で並ぶように設けられ、動作条件も同じである。さらに検査用FPC板14−2の反転部Tでの位置が主FPC板14−1より内側としている。この結果、検査用FPC板14−2の疲労劣化速度が主FPC板14−1に対して僅かに早めとなる。
(もっと読む)
可動機械制御装置及び可動機械制御システム
【課題】
操作装置と可動機械制御装置とを非接続状態としても可動機械を稼働させる場合において、接続状態に戻す際に、非常停止機能の安全性を確認するために可動機械を停止する必要があった。
【解決手段】
半導体スイッチ34,34Aは、教示操作装置50が非接続状態において、オン作動すると、リレーRY1,RY3を励磁して非常停止スイッチ回路SC1,SC2が外されたことによるロボットRの停止を無効化する。診断回路40,40Aは、半導体スイッチ34,34Aがオン作動している期間に、メーク接点RY1a,RY3aがオフ作動しない範囲で半導体スイッチ34,34Aの診断を行う。教示操作装置50を接続状態に戻す際に可動機械を停止することなく非常停止機能の安全性を診断することができる。
(もっと読む)
ロボットシステム
【課題】ロボットの作業範囲内まで物品を搬送する搬送車を備えるロボットシステムにおいて、作業者の安全を確保するとともに、ロボットの作業性の低下を抑制する。
【解決手段】ロボットシステムは、ロボットアーム23により作業を行うロボット20と、ロボット20の作業範囲(危険領域A2)内まで組付け部品31を搬送する無人搬送車30とを備える。ロボットシステムは、水平方向に走査してレーザ光を照射し、物体により反射されて戻るレーザ光に基づいて、ロボット20から物体までの距離を検出する領域センサ40a〜40dと、領域センサ40a〜40dにより検出される距離が、危険領域A2の半径(L2/2)よりも短いことを条件として、ロボット20に安全動作を実行させるコントローラと、無人搬送車30に設けられ、領域センサ40a〜40dから無人搬送車30へ照射されたレーザ光を上方へ反射させる反射ベルト32とを備える。
(もっと読む)
ロボットの制御装置及びロボットの接続不良判定方法
【課題】誤配線が生じている状態でも、モータの誤動作量を極力少なくした状態で、誤配線を検出できるロボットの制御装置を提供する。
【解決手段】制御回路は、複数のサーボモータの何れか1つを検査対象モータとして(S4)、電源投入時に検査対象モータ)に配置されている位置検出器によって得られる位置θaから検査対象モータの初期位置を取得すると、検査対象モータの回転子が初期位置を維持するように、対応するインバータを介して検査対象モータの各相巻線に駆動電流を出力する(S11,S12)。その電流出力期間内にロボット本体の各軸に配置されるサーボモータの何れかが回転すると(S14:YES)、各インバータと夫々に対応するサーボモータとの接続状態を不良と判定する(S22)。
(もっと読む)
1 - 20 / 114
[ Back to top ]