
Fターム[3C030BB03]の内容
Fターム[3C030BB03]に分類される特許
21 - 40 / 45
ワーク把持装置、および、これを用いたアッセンブリの組立て方法
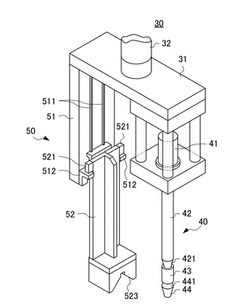
【課題】複数の部品が積層されて構成されるアッセンブリについて、省スペースで効率的に組み立てできるワーク把持装置を提供すること。
【解決手段】把持装置30は、基部31と、この基部31に設けられて所定方向に延出し先端に第1の駒421を有する円筒状のガイド部42と、このガイド部42の同軸上に設けられた円筒状のコレット43と、ガイド部42およびコレット43に挿通されて、先端に第2の駒441を有する棒状のシャフト部44と、ガイド部42とシャフト部44とを相対移動させることにより、駒421、441同士を接近または離隔させるアクチュエータ41と、基部31に設けられて所定方向に進退可能でありかつ先端がワークに係止可能な係止部50と、を備え、第1の駒421および第2の駒441の外径は、コレット43側では、コレット43の内径よりも小さく、コレット43の反対側では、コレット43の内径よりも大きい。
(もっと読む)
嵌合の詰まり状態を修正する嵌合装置

【課題】嵌合ワークの姿勢を被嵌合ワークに嵌合可能になるように短時間で適切に修正する。
【解決手段】ロボットにより把持される嵌合ワーク(60)を、力制御によって被嵌合ワーク(50)に嵌合する嵌合装置(10)は、嵌合ワークの制御点に働く力とモーメントとを検出する力検出手段(3)と、嵌合時に、嵌合ワークと被嵌合ワークとの間に詰まりが生じているか否かを判定する判定手段(12)と、判定手段により詰まりが生じていると判定された場合には、嵌合ワークが被嵌合ワークに進入した距離に応じて制御点の位置を変更して、嵌合方向に対して垂直な方向において嵌合ワークを被嵌合ワークに押付け、それにより、変更後の前記制御点に基づいて前記嵌合ワークの姿勢を修正する変更手段(13)とを具備する。
(もっと読む)
物品の加工装置
【課題】勝手の異なる2種類の車両用サンバイザーを能率よく組み立てることができる組立装置を提供する。
【解決手段】基台11に回動フレーム12を鉛直な回動軸線Lを中心として第1の位置と第2の位置との間を回動可能に設ける。回動フレーム12の第1の位置に位置したときに前側(図において左側)に位置する部分には、右勝手用のサンバイザーを組み立てるための第1組立部20を設ける。回動フレーム12の第2の位置に位置したときに前側に位置する部分には、左勝手用のサンバイザーを組み立てるための第2組立部20′を設ける。
(もっと読む)
円筒状部材の中心位置合わせ装置
【課題】 円筒状部材の中心位置合わせ装置において、中心位置合わせの調整作業を不要にし正確な中心位置合わせを可能にする。
【解決手段】 移動側ユニット2には、円筒状に形成された第1ワーク4を保持するセンタリングチャック14とこれと中心位置合わせがなされた基準ピン13とが備えられている。固定側ユニット3には、第2ワーク5の円筒部5aを保持する円周方向に三個に分割されたホルダー部材22aと、これらホルダー部材22aを中心方向に付勢する圧縮コイルばね24とが備えられている。基準ピン13の先端部13aはテーパー状に形成され、三個のホルダー部材22aの中心には、先端部13aが係入される係入孔22cが形成されている。
(もっと読む)
ピストン挿入装置
【課題】構造が複雑になることなく、リングの折れや異常な負荷を容易に検出すること。
【解決手段】シリンダブロックCBをセットするための基台11と、シリンダボアCRと同じ内径の貫通穴を有し基台に取り付けられた挿入治具12と、チャック装置13と、チャック移動装置14と、チャック装置を貫通して貫通穴に挿入されたピストンPSの下面に当接するように設けられた押し棒15と、押し棒を上昇移動させる押し棒移動装置14と、コンロッドガイド17と、コンロッドガイドを昇降移動するためのガイド移動装置18と、押し棒の上昇移動とコンロッドガイドの上昇移動とが同期するように押し棒移動装置とガイド移動装置とを同期制御する同期制御部26と、押し棒に加わる軸方向の荷重を検出するための荷重センサLC1と、荷重センサの検出信号に基づいてピストンの挿入の良否を判定する監視制御部27とを有する。
(もっと読む)
組立て装置
【課題】 大型の焼ばめホルダーでもツールのシャンクの弱い当りによって敏感に横移動および傾きが得られて、芯合わせと挿入が確実に行うことができる組立て装置を提供することを目的としている。
【解決手段】 部品セット支持部6は、本体ベース33と、この本体ベース33の上部に上方に向けてエアを噴射させるエア噴射口34と、本体ベース33に載せられたエア噴射口34からのエアの噴射により浮き上がり状態とされる焼ばめホルダー5がそのフランジ38を載せてセットされる浮遊ベース39とから構成され、エア噴射口34からのエアの噴射による浮遊ベース39の浮き上がりによって、ツール10のシャンク11の尻の一部が該焼ばめホルダー5の部品把持部41の加熱により拡径した部品挿入穴42に軽く芯合わせがされ入るようになっている。
(もっと読む)
往復動体のセンタリング方法及びそれをもって製造された構造体
あるデザインを用いたボア内でピストンのような往復動体を組み立てる方法である。ピストンは通常の操作中、ピストンがボアの対称軸に沿ってボア内で回転することができるように、ピストンがボア内で実質的にセンタリングされ、ボアに接続された実質的に側面で固定された構造に回転カップリングを通して一端で接続され、もはや横方向には移動することができない。回転カップリングを固定する前、ピストンは外部のガス源に接続され、ボアに対して配設された1又は複数のガスベアリングポートを有するガスベアリングによってボアの対称軸に沿って実質的に整列されている。通常の操作中、ガスベアリングはピストンとボアとの間の非摩擦ベアリングを実現するのに十分な回転力を提供する。この組立方法は、ピストンと、前記ピストンを含むことが可能なコンプレッションボアと、ピストンへのガス入口と、前記ピストン内に配設され、前記コンプレッサボアに配設され、前記ガス入口に流体的に連通した複数のガスベアリングポートと、前記ピストンの一端に取り付けられた回転カップリング構造と、前記コンプレッサボア及び前記回転カップリング構造に付加された実質的に側面で固定された構造とを具備するスターリングサイクルクライオクーラの組立に特に有益である。 (もっと読む)
軸状部品の供給制御装置
【課題】 供給ロッド全体が移動することによって軸状部品が目的箇所に供給される際に、係止部材に係止された軸状部品が軸線方向に移動することを抑制できる軸状部品の供給制御装置を提供する。
【解決手段】 進退式の供給ロッド5を、その進退方向にほぼ直交する方向に往復させる供給駆動手段19によって支持し、供給ロッド5に軸状部品1の係止部材7が設けられ、供給駆動手段19によって係止部材7を移動させることによって軸状部品1を受入孔16に挿入するものであって、供給ロッド5と一体になって移動するとともに係止されている軸状部品1の軸線方向に進退して軸状部品1の軸線方向の移動を抑制する制止部材28が設けられている。
(もっと読む)
圧入材の圧入方法
【課題】圧入材を圧入する際にかじりの発生を防止することができる圧入材の圧入方法を提供すること。
【解決手段】被圧入材としての正極側放熱板52にプレス打ち抜きにより、壁面にせん断面と破断面とを形成しつつ嵌合孔150を形成する嵌合孔形成工程と、少なくとも一つの周方向溝152をせん断面に形成する溝形成工程と、せん断面側から圧入材としての整流素子54を圧入する圧入工程とを有している。整流素子54の圧入が進行する際に発生する余肉を、せん断面に形成された周方向溝152に逃がすことができる。
(もっと読む)
アッセンブリの組立方法
【課題】低コストかつ省スペースでアッセンブリを組み立てできるアッセンブリの組立て方法を提供すること。
【解決手段】アッセンブリの組立方法は、それぞれ挿通孔411、421を有する2つの部品41、42と、挿通孔411、421に挿通されたアクスル43と、を備えるアッセンブリ40の組立方法である。この組立方法は、2つの部品41、42の挿通孔411、421にピン24を挿通して、これら2つの部品41、42をアッセンブリ化し、このアッセンブリ化した2つの部品41、42を所定位置に位置決めする手順と、アクスル43をピン24と同軸上に配置する手順と、アクスル43をピン24に向かって前進させて、アクスル43の先端をピン24の先端に当接させる手順と、アクスル43とピン24とが当接した状態を維持しつつ、アクスル43をさらに前進させて、このアクスル43を挿通孔411、421に挿通する手順と、を備える。
(もっと読む)
嵌合装置
【課題】コンプライアンス制御を用いた嵌合装置において、従来よりも高速で安定した嵌合を行うこと可能にする。
【解決手段】嵌合装置10は、ワークを把持するハンドを先端に備えたロボットアーム12と、ハンドに把持されたワークが受ける力及びモーメントを検出するための力検出器14と、ロボットアーム12の動作を制御するための制御装置16とを備える。制御装置16は、ワークを嵌合させるように動作指令を作成する動作指令作成部30と、ワークの接触中に力検出器14によって検出される力及びモーメントの最大値又はワークが初めて接触したときに力検出器14によって検出された力及びモーメントの何れかに基づき、検出される力及びモーメントが閾値以下になるまで、嵌合方向に対して垂直な方向に関するハンドの位置と嵌合方向に対して垂直な軸線周りのハンドの姿勢とを修正するように動作指令を補正する動作指令補正部32とを備える。
(もっと読む)
部品組付装置及び部品組付方法
【課題】コントロールバルブユニットのバルブボディの嵌入孔に、スプール、スプリング及びプラグを確実に嵌入させることが可能な部品組付装置及び部品組付方法を提供する。
【解決手段】ガイドブッシュ7を軸直角方向へ変位させつつ、スプリング5及びプラグ6の各軸心を嵌入孔3の軸心に一致させて、スプリング5及びプラグ6を嵌入孔3に順次嵌入させる。したがって、ガイドブッシュ7とスプール4、スプリング5及びプラグ6とのクリアランスをシビアに設定することが可能になり、スプール4、スプリング5及びプラグ6が嵌入孔3の軸心に対して傾くことを防止して、スプール4、スプリング5及びプラグ6を嵌入孔3に円滑に順次嵌入させることができる。
(もっと読む)
嵌合装置
【課題】姿勢を正常な姿勢から遠ざけずに、第一嵌合部材を第二嵌合部材に嵌合する。
【解決手段】ロボットアーム(2)の先端に取付けられたハンド(4)により把持される第一の嵌合部材を対応する第二の嵌合部材に嵌合させる嵌合装置(10)は、第一および第二の嵌合部材が当接したときに発生する力を検出する検出手段(3)と、検出手段により検出された力に基づいて、これら嵌合部材が一点で当接している一点当接状態であるか、またはこれら嵌合部材が少なくとも二点で当接している二点当接状態であるかを判断する判断手段(12)と、を具備する。一点当接状態である場合には、ロボットアームの把持姿勢を保持した状態で、ハンドに把持される第一の嵌合部材を第二の嵌合部材に嵌合方向に押付けて嵌合作用を進行させ、二点当接状態である場合には、ロボットアームの把持姿勢を変更可能な状態で、嵌合作用をさらに進行させる。
(もっと読む)
バルブのバルブガイドへの挿入方法及び同挿入装置
【課題】各部の摩耗、変形、破損の心配がなく、また、簡単な構成で、バルブをバルブガイドに容易に且つ確実に挿入できるようにする。
【解決手段】少なくとも下部支持部材26に加振装置19で振動を与えた状態で、バルブ13を支持した上部支持部材25及び下部支持部材26を一体的にバルブガイド12側へ下降させたときに、軸部13aの面取り部がバルブガイド12の開口縁に掛からない場合には、軸部13aの端面13eがバルブガイド12の上端面12bに当った後に、上部支持部材25を傘部13bから次第に離すとともに下部支持部材26による軸部13aの支持位置を下方に移動させて軸部13aの端面13e側の振れを小さくすることで軸部13aの下端の面取り部がバルブガイド12に設けられたバルブ挿入穴12aの開口縁に自動で掛かるため、この後に、バルブ13を押圧子で押してバルブ挿入穴12aに挿入する。
(もっと読む)
組立方法及び組立装置
【課題】部材の移動操作の精度を特段に向上させる必要を生ずることなく、軸部品102の孔への挿入を短時間で完了することができ、さらに、軸部品102を孔部品101に押し付けたままで移動させることがない組立方法及び組立装置を提供する。
【解決手段】孔部品101又は軸部品102のいずれかを把持して移動操作して孔103に軸部品102を挿入する組立方法において、孔103に軸部品102を挿入させるときに軸部品102の先端部と孔103の周囲部とが当接した場合に孔部品101が受ける挿入方向の並進力及びこれに直交する軸周りのモーメントを検出し、検出された並進力及びモーメントに基づく演算を行い軸部品102の先端部の当接位置の孔103の中心からの方向及び距離を算出し、算出された方向及び距離に応じて孔部品101、または、軸部品102のいずれかを移動操作して、軸部品102を孔103に挿入させる。
(もっと読む)
軸状部品の供給装置
【課題】 軸状部品の保持箇所を適正に選定して、所定の移動軌跡をたどりながら安定した部品移行が行える軸状部品の供給装置を提供する。
【解決手段】 供給管13における軸状部品1の供給軸線O−Oに合致した位置で待機する中継部材10を設け、軸状部品1の後部が中継部材10から突出した状態で送出位置14へ移行させる進退式の移行手段15を設け、送出位置14において軸状部品1を送出する送出ヘッド部材32を設け、送出ヘッド部材32に進退式の送出手段36を設け、送出手段36を送出ヘッド部材32と一体の状態で供給軸線O−Oとほぼ同方向に進退させる供給手段50を設けた。
(もっと読む)
ピストン自動組付け装置
【課題】ピストンの自動組付けを行なえる装置を提供する。
【解決手段】シリンダブロックを鉛直方向及び水平方向及びクランクシャフト回りに移動させ位置決めするブロック位置決め手段、ピストンを挿入する位置に移動させて位置決めするピストン位置決め手段、ピストンをシリンダボア内に挿入するピストン挿入手段、コンロッドキャップを締結する位置に移動させて位置決めするキャップ位置決め手段、コンロッドキャップを締結する締結手段等を備え、ブロック位置決め手段が、シリンダブロックを把持すると共にシリンダボアを鉛直方向に向けるべく回転させ得るブロック把持ユニット30及びブロック把持ユニットに一体的に設けられてクランクシャフトを回転させるシャフト回転ユニット40を有する。これにより、直列型、V型等の種々のエンジンにピストンを自動的に組付けでき、生産性が向上する。
(もっと読む)
一つの弾性体で構成された弾性中心機器
【課題】一つの弾性体で構成された弾性中心機器を提供する。
【解決手段】弾性体210は両端に一定の傾斜を有して形成される円板212と、円板を一定間隔で多数積層し、積層された多数の円板の両端に位置し、両端のそれぞれには、円板の傾斜と対称する同一な傾斜を有する突出部216aと陥没部214aが形成され、多数の締結孔が形成される第1及び第2支持部214、216と、第1及び第2支持部の間に積層された多数の円板が互いに弾性結合されるように、その間に充填される充填材218とで構成される。第1支持部214は、昇降部Mの下端に固定される。第2支持部216は、圧入部品Aを把持できる圧入フレームで構成された下部支持体14に固定される。弾性体210の弾性中心点Pは、圧入フレームに把持された圧入部品Aの端部に位置する。
(もっと読む)
シャフト圧入装置
【課題】垂直方向にセンター支持されるシャフトに対して嵌合体を水平にセットすることができ、同軸度及び直角度を容易に合わせることができ、また部品間にガタや撓みを発生させることがなく、安定した負荷荷重のもとに高負荷、高速圧入に対しても高精度な圧入ができるようにしたシャフト圧入装置を提供する。
【解決手段】シャフト130の一端に対向して垂直方向に配置され、背面に圧縮バネ115の圧力を受けてシャフト130の一端中心を押圧支持する第1センターピン114を内蔵するシャフト押圧治具110と、シャフト130の他端に対向して第1センターピン114と同軸上に配置され背面に圧縮バネ125の圧力を受けてシャフト130の他端中心を押圧支持する第2センターピン124を内蔵し、かつ上面に嵌合体140を水平に支持する受台123を有する嵌合体受け治具120とでシャフト圧入装置100を構成する。
(もっと読む)
フランジ付き軸の製造方法及び軸挿入装置
【課題】穴を有する部材に軸を精度よく焼きばめ挿入する軸挿入装置を提供する。
【解決手段】挿入側に面取りが施された対象物51の穴52に軸43を焼きばめで挿入するための軸挿入装置30であって、 前記軸43を保持する軸保持手段40と、前記軸43が挿入される穴52を設けた対象物51を保持すると共にこの穴52を加熱する加熱手段53,57を有する対象物保持手段50と、前記対象物保持手段50が設けられ、水平方向に移動可能な調芯手段60と、前記調芯手段60の一側に設けられた角度調整手段70と、前記軸保持手段40を所定方向に移送する軸挿入手段80とを設けたことを特徴とする。
(もっと読む)
21 - 40 / 45
[ Back to top ]