
Fターム[3C269GG03]の内容
数値制御 (19,287) | 位置制御系の種類、構成 (490) | フィードバック制御系 (330) | 制御特性を限定しているもの (55)
Fターム[3C269GG03]に分類される特許
1 - 20 / 55
ロボット装置およびロボット装置の制御方法
【課題】従来のロボット装置の制御方法にあっては、制御装置における演算量が多くなり処理に時間が掛かったり、処理速度を上げるために制御装置のコストが増加したりする問題があった。
【解決手段】角度センサーの回転角度検出データより、前記角度センサーを備えるアクチュエーターによって動作するアームの角速度を演算する第1演算部と、慣性センサーの角速度検出データより、前記基体連結装置および前記アーム連結装置を軸とする前記アクチュエーターにより作動する前記アームの角速度を演算する第2演算部と、前記アクチュエーターによって動作する前記アームの前記角速度および前記慣性センサーの前記角速度検出データによって演算された前記アームの前記角速度の差より、振動の周波数成分を前記アーム毎に抽出し、前記アクチュエーターと前記アームとの間のねじれ角速度を演算する第3演算部と、を備えるロボット装置。
(もっと読む)
学習制御機能を備えたロボット

【課題】従来、学習制御器の調整は経験に基づいて試行錯誤で行われており、調整が難しいという問題があった。
【解決手段】本発明のロボットは、位置制御の対象とする部位にセンサを備えたロボット機構部(1)と、ロボット機構部の動作を制御する制御装置(2)とを含み、制御装置(2)は、ロボット機構部の動作を制御する通常制御部(4)と、作業プログラムに指定された教示速度に、速度変化比を乗算した速度指令にてロボット機構部(1)を動作させたときに、センサにより検出された結果から、ロボット機構部の制御対象の軌跡又は位置を目標軌跡又は目標位置に近づけるため、もしくは制御対象の振動を抑制するための学習補正量を算出する学習を行う学習制御部(3)と、を有し、ロボット機構部の制御対象位置が速度変化比に依らず一定の軌跡を移動するように処理を行うことを特徴とする。
(もっと読む)
タッピング加工装置
【課題】主軸と送り軸との同期誤差を低減する。
【解決手段】主軸モータ(21)と送り軸モータ(31)とを同期運転してタッピング加工動作を行うタッピング加工装置(1)は、タッピング加工時に前記主軸の反転動作を検出する主軸反転動作検出部(34)と、主軸反転動作検出部によって主軸の反転動作が検出されたときに、送り軸の反転動作の追従性を向上させる反転補正量を作成する反転補正量作成部(35)とを含み、主軸反転動作検出部によって反転動作が検出された際に、反転補正量作成部により作成された反転補正量を送り軸制御部(37)の速度制御ループの速度指令または、速度制御ループの積分器(41)に加算する。
(もっと読む)
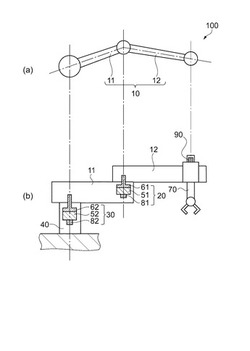
ロボット制御システム、ロボットシステム
【課題】制御ハードウェアーへの性能要求を低減できると共に応答性の改善も図れるロボット制御システム、ロボットシステム等の提供。
【解決手段】ロボット制御システムは、ロボット100のフィードバック制御の目標値を出力する目標値出力部60と、力覚センサー10からのセンサー情報に基づいて力制御を行い、目標値の補正値を出力する力制御部20と、補正値により補正された目標値に基づいて、ロボットのフィードバック制御を行うロボット制御部80を含む。力制御部20は、ロボットの姿勢に応じて変化する制御パラメーターを事前計算する事前計算部22と、センサー情報と制御パラメーターとに基づき補正値を求める演算処理を実行する実行部26を含む。
(もっと読む)
振動抑制方法
【課題】加速または減速運動に伴って運動体に生じるn自由度かつ時変の振動を、インプットシェイピング法を適用して効果的に抑制する振動抑制方法を提供する。
【解決手段】運動体に付加された第1の入力によって運動体に生じる第1の応答に、第1の応答の変位が0となる時刻において、第2の入力を運動体に付加して生じる第2の応答を重ね合わせて、互いに打ち消し合うインプットシェイピング法を適用する場合に、n自由度かつ時変の振動における複数のモード間のエネルギの移り変わりのうち、モード間の相互作用によるものを無視し、固有振動数および減衰比の変化によるものを考慮して、第1の入力に対する第2の入力の大きさを決定する。
(もっと読む)
フィードバック制御装置、フィードバック制御方法、モータ及びロボット
【課題】所定動作量(例えば動作速度)以下においても位置決め精度の低下や振動の抑制を図ることを目的とする。
【解決手段】制御対象の動作状態を検出する状態検出器を介して、フィードバック信号を取得するフィードバック信号取得手段と、前記フィードバック信号取得手段で取得したフィードバック信号から誤差成分の周期情報を検出する誤差周期検出手段と、制御指令信号、又は前記フィードバック信号と、前記誤差周期検出手段で検出した周期情報とに基づき、前記誤差成分の周波数を算出する誤差周波数算出手段と、前記誤差周波数算出手段で算出した周波数の信号成分を除去するフィルタを用いて、前記制御対象に出力する制御信号をフィルタリングするフィルタリング手段と、前記制御指令信号の示す動作量又は前記フィードバック信号の示す動作量に基づき、フィルタ形状を算出するフィルタ形状算出手段と、を備える。
(もっと読む)
軌跡制御装置
【課題】加減速の影響により送り速度が過渡的に変化するような場合でも軌跡誤差を抑制できる軌跡制御装置を得ること。
【解決手段】軌跡制御装置は、機械の可動部が複数の可動軸により駆動され、前記複数の可動軸を同時制御することにより前記可動部の軌跡を制御する軌跡制御装置であって、与えられた指令経路に対して補間・加減速を行う補間・加減速演算部と、前記補間・加減速された指令経路に応じて、前記複数の可動軸の位置指令を生成する軸分配部と、前記複数の可動軸の位置指令と前記補間・加減速された指令経路とに基づいて、軌跡誤差を補正するための補正ベクトルを演算する補正ベクトル演算部と、前記演算された補正ベクトルを用いて前記複数の可動軸の位置指令を補正する位置指令補正部と、前記複数の可動軸の位置が前記補正された複数の可動軸の位置指令に追従するように、前記複数の可動軸を同時制御するサーボ制御部とを備えている。
(もっと読む)
直進型及び回転型ロボットの制御装置
【課題】高精度な位置決めが要求される工作機械等において、比較的単純な構造を保ちつつ、迅速かつ高精度な位置決めを実現する直進型及び回転型ロボットの制御装置を提供する。
【解決手段】H無限大制御理論に基づく制御系であって、制御器は数式的に以下の3つの部分に分かれる。1)モータの速度が定常誤差なく追従できるように設計された速度制御器。2)速度制御ループを含めたモータに対して設計されたH∞角度制御器。3)ゲイン可変のフィードフォーワード制御器。制御対象の伝達関数に積分要素が含まれた場合における適切な制御が可能となる。
(もっと読む)
工作機械
【課題】象限突起を軽減する補正値を容易に算出することができ、被加工物の加工精度を向上させることができる工作機械を提供する。
【解決手段】サーボモータ60の目標位置指令S1に応じ、サーボモータの回転によって被加工物が載置された移動体71を移動させると共に、目標位置指令によってサーボモータの回転方向が反転する際に被加工物に生じる象限突起を軽減するように補正する工作機械1において、移動体の位置を検出する位置検出部80と、回転方向が反転した後に、サーボモータの回転速度を回転方向が反転する前の回転速度に同期するように漸減補正する回転速度漸減補正値を算出する回転速度漸減補正値算出部20と、を備え、回転速度漸減補正値算出部は、目標位置指令と位置検出部からフィードバックされる移動体の位置との位置偏差eに基づいて、回転速度漸減補正値を算出する。
(もっと読む)
位置制御装置
【課題】フルクローズド位置制御に於いて、送り軸機構部の剛性が低下した場合でも、低周波の振動が発生することなく、安定に動作させる位置制御装置を提供する。
【解決手段】被駆動体の位置検出値Plとモータの位置検出値Pmの差分を入力とした1次遅れ回路17の出力と、モータの位置検出値Pmを加算した位置検出値を位置フィードバック値として使用する位置制御装置において、経年変化補正器30が被駆動体の振動を検出した場合に、前記1次遅れ回路17の時定数Tpが大きくなるように可変することで低周波振動の発生を抑制する。
(もっと読む)
数値制御装置及び摩擦補償方法
【課題】ダブルナット予圧方式の送り駆動機構においても低速から高速の領域まで摩擦力又は摩擦トルクを高精度で推定して象限突起を補正できる数値制御装置及び摩擦補償方法を提供する。
【解決手段】本発明の数値制御装置はオーバーサイズボール予圧方式だけでなく、ダブルナット予圧方式の送り駆動機構においても低速から高速の領域まで摩擦力又は摩擦トルクを高精度で推定する。故に数値制御装置は象限突起を補正できる。象限突起は指令軌跡よりも移動軌跡が外側に出る現象である。ダブルナット予圧方式の送り駆動機構はボール螺子軸が反転して一山目の象限突起を生じる。ダブルナット予圧方式の送り駆動機構はテーブルが反転後所定量移動した時に更に二山目の象限突起を生じる。数値制御装置はダブルナット予圧方式の時に二段階で生じる摩擦力の上昇を二つの近似式を用いて高精度に推定できる。
(もっと読む)
送り軸反転時の補正方法
【課題】象限突起を高精度で補正することのできる象限突起補正方法を提供する。
【解決手段】数値制御工作機械10の送り軸反転時に生ずる象限突起を補正する象限突起補正方法は、数値制御工作機械のNCプログラムから、サーボモータに指令されるべき位置指令を現在の位置指令から所定時間後の位置指令まで所定の制御周期毎に記憶部に記憶し、記憶された位置指令に基づいて反転補正指令を算出し、サーボモータの動作により得られる情報に基づいて、反転補正指令をサーボモータの速度指令またはトルク指令に付加する時刻を、サーボモータの反転時刻から繰上げる繰上時間を算出し、サーボモータの反転時刻よりも繰上時間だけ繰上げた時刻に反転補正指令をサーボモータの速度指令またはトルク指令に付加して象限突起を補正する。
(もっと読む)
象限突起補正方法
【課題】象限突起を補正する高精度な補正指令を簡易かつ短時間で算出する。
【解決手段】数値制御工作機械10の送り軸の移動方向反転時に生ずる象限突起を補正する象限突起補正方法において、数値制御工作機械のサーボモータで駆動される送り軸の所定区間を繰り返し駆動して位置偏差を求め、該位置偏差に基づいて学習制御を行うことにより、サーボモータに入力される指令に付加されるべき、象限突起を補正する補正指令を作成し、補正指令は立ち上がり部分と立ち下がり部分とを少なくとも含んでおり、立ち上がり部分は、単一の直線Cv1または単一のアークタンジェント曲線Cv4で近似されると共に、立ち下がり部分は、少なくとも一つの指数関数曲線Cv3で近似される。
(もっと読む)
非真円形穴加工方法および非真円形穴加工装置
【課題】高速かつ高精度でワークを加工できる非真円形穴加工方法を提供すること。
【解決手段】非真円形穴加工方法は、シリンダブロックに既に形成された断面非真円形状のボアと同一形状のボアを、シリンダブロックに形成する。すなわち、既に形成されたボア軸線上に複数の測定点を設定し、これら複数の測定点それぞれでのボアの内径形状を測定して、内径形状データとして取得する内径形状データ取得工程と、内径形状データを周波数解析し、0次からn次(nは自然数)までの周波数成分の振幅値および位相値を分析内径形状パラメータとして算出する分析内径形状パラメータ算出工程と、前記内径形状パラメータを、加工装置の電子記憶媒体に記憶させる分析内径形状パラメータ記憶工程と、を備える。
(もっと読む)
研磨装置
【課題】研磨装置の小型化や省コスト化を可能にし、また、制御の切換によるショックが生じないようにする。
【解決手段】回転速度偏差算出部230が、目標回転速度から、研磨具11の回転速度を減算した回転速度偏差を算出し、制御補正量算出部240が、回転速度偏差に基づいて、前記移動駆動部15の前記研磨具11に対する加力を積分制御するための制御補正量を算出する。また、総合目標位置算出部320が、目標位置から、制御補正量を減算した総合目標位置を算出し、総合位置偏差算出部330が、総合目標位置から実位置を減算した総合位置偏差を算出する。そして、位置制御部340が、総合位置偏差に基づいて、PID制御による制御指令値を算出して、移動駆動部15に出力する。
(もっと読む)
ロボット装置、ロボット装置の制御方法およびプログラム
【課題】従来のロボット装置の制御方法にあっては、制御装置における演算量が多くなり処理に時間が掛かったり、処理速度を上げるために制御装置のコストが増加したりする問題があった。
【解決手段】アクチュエーターの角度センサーの回転角度検出データより、前記角度センサーを備える前記アクチュエーターによって動作する前記アームの角速度を演算する第1演算部と、前記第1演算部の演算対象の前記アクチュエーターを含む連結装置を介して連結される前記アームに備える慣性センサーの角速度検出データより、前記連結装置を軸とする前記アームの角速度を演算する第2演算部と、低周波成分を除去した、前記アクチュエーターと前記アームとの間のねじれ角速度を演算する第3演算部とを備えるロボット装置。
(もっと読む)
任意区間で速度変更が可能な揺動動作機能を有する数値制御装置
【課題】境界点の折り返し時に加減速の溜まりを発生させず、境界点の精度向上が実現でき、揺動制御に合った任意区間の速度変更が可能な、精度を保持しながら、加工サイクルタイムの短縮が可能な任意区間で速度変更が可能な揺動動作機能を有する数値制御装置を提供すること。
【解決手段】揺動動作指令コードを解析し、上死点位置をZU、下死点位置をZL、揺動動作の基準速度をFBに設定し、現在位置を取得し、ZoldをZに代入する(SA100〜SA102)。現在位相を算出し、現在速度を算出し、位置を更新する(SA103〜SA105)。終了指令か否か判断し、終了の場合には処理を終了し、終了指令でない場合には、データ変更か否か判断し、変更する場合にはステップSA101へ移行し、変更しない場合にはステップSA102へ移行する。
(もっと読む)
ロボットの制御装置及び方法
【課題】ロボットの柔軟制御中にロボットに対して急激に大きな外力が働いた場合に、ロボット各軸の位置の急激な変化に適切に対応し得る可動域制限を行うことができる制御装置及び制御方法を提供する。
【解決手段】本制御装置及び制御方法は、少なくとも1つの関節を有するロボットにおいて、各関節につき、関節位置指令に対して、位置フィードバック制御及び速度フィードバック制御を行い、該関節に設定された関節座標系において、所定の制限開始位置と該関節の現在位置との関係及び所定の制限開始速度と該関節の現在速度との関係に基づいて制限トルクを計算し、計算された制限トルクを速度フィードバック制御の出力に加算して得られるトルクにより該関節の動作を制御する。
(もっと読む)
工作機械の送り駆動系の制御方法及び制御装置
【課題】象限突起の補正量を運転状況に応じて適正に定めるとともに、補正のタイミングや補正形状のズレを極小にし、象限突起の補償を十分に行う。
【解決手段】送り駆動系の制御方法は、サーボモータにより送り運動される移動体の位置検出信号と位置指令信号とが一致するように速度指令信号を生成し、サーボモータの速度検出信号と速度指令信号とが一致するように駆動力信号を生成し、この駆動力信号に基づいてサーボモータの駆動力を制御する。位置指令信号を先読みし、位置及び送り速度から送り駆動系に作用する摩擦力を推定する摩擦力推定工程21と、位置指令信号の入力から実際に移動体位置が駆動されるまでの制御系をモデル化し、このモデルの摩擦力と位置指令との関係から、上記摩擦力推定工程で推定した摩擦力に相当する補正指令を算出し、この補正指令を位置指令に加算して摩擦力の補償を行う摩擦力補償工程22とを備える。
(もっと読む)
軌跡制御装置
【課題】コーナ形状のように指令経路の方向が急峻に変化するような場合でも駆動系に過大な負荷や振動を生じさせずに、また制御系の安定性を損なうことなく軌跡誤差を抑制すること。
【解決手段】複数の可動軸のモータを同時制御することにより可動部の軌跡を制御する軌跡制御装置10において、サーボ系応答軌跡を演算するサーボ系応答軌跡算出部1と、誤差ベクトルを演算する誤差ベクトル算出部2と、誤差ベクトルとサーボ系応答軌跡の所定の参照点における移動方向に基づいて補正ベクトルを演算する補正ベクトル演算部3と、補正ベクトルを各軸に分配して各可動軸の補正量を演算する各軸補正量演算部4と、各可動軸の補正量を対応する軸の位置指令に加算する補正量加算部5、6と、各可動軸の位置がそれぞれの軸の補正後位置指令に追従するように各軸のモータ駆動トルクを出力することによりそれぞれの軸のモータを制御するサーボ制御部7、8を備えた。
(もっと読む)
1 - 20 / 55
[ Back to top ]