
Fターム[3D034CB09]の内容
操向リンク系及び4WS (6,986) | 4WSを装備した車両の種類 (112) | 特殊車両 (42) | 多方向走行車両 (28)
Fターム[3D034CB09]に分類される特許
1 - 20 / 28
電気自動車の車体構造
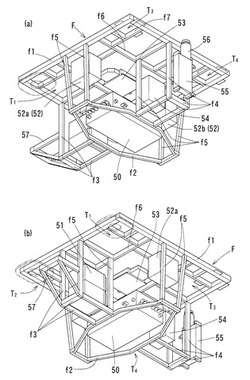
【課題】インバータのメンテナンスを容易にする。
【解決手段】車両のフレームFの床面よりも上に座席Sを備えるようにし、走行用モータ34に電力を供給するバッテリ51と、前記走行用モータ34用に電力を変換するインバータ50とを、車両のフレームFの床面よりも下に収納するようにした電気自動車の車体構造において、前記バッテリ51を前記座席Sよりも前方に、前記インバータ50を前記座席の直下に配置する電動自動車の車体構造とした。バッテリを座席よりも前方に、インバータを座席の直下に配置したことにより、座席を取り外すことで、インバータが床面を通じて上方に露出させることができ、インバータのメンテナンスを容易にすることができる。
(もっと読む)
自動車

【課題】 その場回転や、横方向移動等が可能な自動車において、運転者による運転操作の操作性の向上を図る。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される自動車に適用する。走行駆動機構5は、例えばインホイールモータ駆動装置とする。転舵機構4の操作および走行駆動機構5の駆動の操作を行うジョイスティック21を有する。
(もっと読む)
自動車
【課題】 その場回転または横方向移動等の非通常走行形態で走行できる自動車において、非通常走行形態と通常走行形態の間での走行形態の切り換えが、運転者が意図した状態で行えて、不測に切り換わることがないようにする。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される。これにより、その場回転や横方向移動となる非通常走行の運転を可能となる。この前提構成の自動車において、通常走行運転モードと非通常走行運転モードとの切換を、運転者の操作によって切り換える走行モード切換手段41を設ける。
(もっと読む)
車輪ストラット
【課題】乗物に容易に取り付けることができ、乗物用のステアリング手段や車輪用の駆動装置のような他の手段を容易に結合することができる車輪ストラットを提供する。
【解決手段】車輪ストラットは、車輪ストラットを乗物に取り付ける乗物取付け手段108と、車輪ストラットに車輪を取り付ける車輪取付け手段105と、を備えている。車輪取付け手段は、乗物取付け手段108に対して、車輪ストラット100の長手方向軸の周りに回転可能である。車輪ストラット100は、車輪取付け手段を回転させる駆動手段103,101を備えている。
(もっと読む)
車両
【課題】容易に任意の方向に平行移動することが可能な車両を提供する。
【解決手段】2つの前輪及び2つの後輪からなる車輪と、前記車輪にそれぞれ連結され、前記車輪を操舵する4つの操舵用アクチュエータと、前記車輪にそれぞれ連結され、前記車輪を駆動する4つの駆動用アクチュエータと、任意の方向に傾倒されることで操作可能であり、前記操舵用アクチュエータの動作を指示するジョイスティック64と、前記駆動用アクチュエータの動作を指示するアクセルペダル63と、ジョイスティック64が傾倒された場合、ジョイスティック64が傾倒された方向に前記車輪を操舵するとともに、アクセルペダル63が操作された場合、アクセルペダル63の操作量に基づいて前記車輪を駆動するコントローラ100と、を具備した。
(もっと読む)
車両舵取り装置
【課題】タイミングベルトにて連動する複数の操舵軸を独立して回転させることにより、本体を移動させずにその位置で自由な方向に回転させることができる車両舵取り装置を提供する。
【解決手段】車両12の本体14に回動自在に保持された三個以上の操舵軸16と、各操舵軸16にそれぞれ設けられた駆動輪22と、各駆動輪22を独立して回転駆動するためにそれぞれ設けられた駆動源(駆動モータ30)と、各操舵軸16を連動して回動させるための連動装置(タイミングベルト34)と、この連動装置(タイミングベルト34)による各操舵軸16の連動を解除するための連動解除手段(解除クラッチ36)と、少なくとも一つの操舵軸16を本体14に固定するための固定手段(固定クラッチ38)とを備える。
(もっと読む)
編成搬送台車設備
【課題】複数の独立換向式の車輪装置を有する複数の台車を使用して、大型の運搬物を運搬する。
【解決手段】複数台のうち1台をマスタ台車(MC)とし、残りをスレイブ台車(SC)とし、マスタ台車(MC)の操舵コントローラ(M20)に、編成運転モードを判断する単独・編成モード判断部(32M)と、ステアリングホイール(M3,S3)の操舵角から台車群の編成旋回中心を求め、この編成旋回中心から各車輪装置の編成スレイブ軸目標舵角を演算する編成運転制御部(20C)と、車輪装置に舵角指令を出力する舵角指令部(M20B)とを設け、スレイブ台車(SC)に車輪装置に舵角指令を出力する舵角指令部(M20B)を設け、マスタ台車(MC)からスレイブ台車(SC)の舵角指令部(M20B)に編成目標舵角を送信する伝送ケーブル(43A)を設けた。
(もっと読む)
車輪転舵機構
【課題】大舵角転舵時にも車輪がサスペンション装置と干渉せず、サスペンション装置の設置スペースを確保し易く、かつ車輪舵角を十分大きくし得る転舵機構を提案する。
【解決手段】転舵軸線として小舵角用転舵軸線01と大舵角用転舵軸線02とを設定し、車両上方から見て大舵角用転舵軸線02を前記小舵角用転舵軸線01に対して車幅方向内側へオフセットさせ、これら大小の転舵軸線を車輪転舵角に応じて選択し、選択した転舵軸線の周りに車輪支持部材2を転舵させるよう構成する。
(もっと読む)
車輪位置可変車両および車輪位置制御方法
【課題】 操縦安定性の向上と利便性の向上とを共に実現することができる車輪位置可変車両および車輪位置制御方法を提供する。
【解決手段】 各車輪ユニット300を車体100に対して車幅方向の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、各車輪390の輪荷重が目標輪荷重となるようにトレッド&ホイールベース変更アクチュエータ350に対し車輪位置の変更を指令する輪荷重制御装置510と、左右輪の一方と車体の車幅方向中心位置との距離と、左右輪の他方と車幅方向中心位置との距離とを異ならせることにより、車体の車幅方向位置が目標車体位置となるようにトレッド&ホイールベース変更アクチュエータ350に対し車輪位置の変更を指令するキャビン位置制御装置520と、を備える。
(もっと読む)
ステアリング装置
【課題】操舵軸および左右転舵軸間の交差伝動部と、左右転舵軸間の同回転・逆回転切り替え機構部とを1ユニット化したステアリング装置を提案する。
【解決手段】ステアリングホイールから延在する操舵軸の先端に入力傘歯車16を設け、これに噛合させて出力傘歯車17L,17Rを設け、左右輪から延在する左右転舵軸12L,12Rのうち、軸12Lに傘歯車17Lを固設し、軸12R上に傘歯車17Rを回転自在に支持する。軸12Rにシフタ24をスプライン嵌合し、該シフタ24の両側にそれぞれ、傘歯車17L,17Rと共に回転するクラッチ部材25L,25Rを配置する。シフト部材26を介してアクチュエータ27によりシフタ24を軸線方向へ変位させ、シフタ24をクラッチ部材25Lまたは25Rにクラッチ係合させることにより、左右転舵軸同回転駆動状態と左右転舵軸逆回転状態との間での切り替えを行うことができる。
(もっと読む)
自走台車のステアリング制御装置、自走台車、およびステアリング制御方法
【課題】自走台車の全のタイヤのステアリング軸の遅れ角をほぼ同一にし、タイヤに負担がかかることを防止し、タイヤの摩耗を減少させる。
【解決手段】全てタイヤ100のステア角を、タイヤ角度検出器31により常時検出し、比較器15により、個々のタイヤごとにステア指令角信号Vsとステア角FDBK信号とを比較し、ステア偏差角を求める。そして、最大偏差角演算回路18により、個々のタイヤのステア偏差角の内から最大偏差角を求める。ステア偏差角補正回路19では、最大偏差角の情報を基に、個々のタイヤ100のステア偏差角に補正を加え、この補正されたステア偏差角を基に、個々のタイヤ100の油圧機構に流れる油量を制御して、各タイヤのステア角を制御する。これにより追従が特に悪い軸(ステアリング遅れ角が大きい軸)に積極的に油を流すようにし、ステアリング遅れ角をほぼ同一にする。
(もっと読む)
全方向移動台車およびその走行制御方法
【課題】
移動台車にコンパクト化の障害となるような大掛かりな段差乗り越え機構を搭載することなく、スリムな外形のまま、小回りが利き、尚且つ段差乗り越えに有利な全方向移動台車を提供する。
【解決手段】
移動台車本体1と、前記移動台車本体を移動させるための第1、第2および第3のオムニホイル3a、3b、3cと、前記第1、第2および第3のオムニホイル3a、3b、3cの回転をそれぞれ独立に駆動する駆動部2a、2b、2cと、を備えた全方向移動台車において、前記第1のオムニホイルを垂直軸周りに旋回させる第1の旋回駆動部4を備える。
(もっと読む)
構造物への作業機吊下げ用支持台車装置およびその運転方法
【課題】簡単な構造で、台車のこれまでの左右走行に加え、前後走行やその場での旋回走行などを可能とすることで、操作性を向上できる構造物への作業機吊下げ用支持台車装置およびその運転方法を提供すること。
【解決手段】台車20のアーム13の前方側に間隔を開けて2つの前方駆動輪21,21を前方操舵機構40を介して設けるとともに、これら2つの前方駆動輪の間の台車のアーム後方側に1つの駆動・遊転可能な後方駆動輪22を後方操舵機構50を介して設け、前方操舵機構に互いを同一舵角逆方向に設定可能に構成する。
これにより、台車の車輪を3輪で構成し、全輪駆動および各車輪を操舵することで、これまでの左右走行や曲線走行に加え、前後走行およびその場での旋回も可能となり、操作性を向上するようにする。
また、台車装置の外壁面に対する前後方向の寄りつきを容易とし、旋回機構を備えることなく台車上のアームの向きを調整したり、さらに段差乗り越えや溝通過性を向上する。
(もっと読む)
車輪位置可変車両
【課題】 簡単な構成で、車両の利便性と車両の挙動安定性の向上を図るとともに、より自由な車両挙動を実現できる車輪位置可変車両を提供する。
【解決手段】 各車輪390に設けられ、車体100に対する車輪の向きを変更する転舵アクチュエータ340と、各車輪390と車体100との間にそれぞれ設けられ、各車輪390を所定の軌道(車輪ユニット移動軌道200)上の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、走行状態に応じた目標ジオメトリに基づいて、トレッド&ホイールベース変更アクチュエータ350に対し車輪位置変更指令を出力するコントローラ500と、を備える。
(もっと読む)
作業車両のステアリング装置
【課題】一般公道での高速走行を可能とし、かつ、車輪の操舵方向に多様性を持たせて作業車両としての操作性を向上させる。
【解決手段】作業車両のステアリング装置は、ステアリングホイール1と前輪8a,8bとの間の連結経路を断接する前輪側クラッチ18と、ステアリングホイール1と後輪9a,9bとの間の連結経路を断接する後輪側クラッチ28と、ステアリングホイール1の回動方向に対する後輪9a,9bの操舵方向を機構的に正逆に切り替える操舵方向切替装置50とを備えている。
(もっと読む)
走行台車の操向装置
【課題】全方位移動可能であるうえに実用性に優れ、しかも狭い畝間でも走行することが可能な走行台車の操向装置を提供する。
【解決手段】タイヤ33及びタイヤホイール34からなる車輪部35と、タイヤホイール34に組み付けられて車輪部35を回転駆動するインホイールモータ36と、タイヤ33のタイヤ中心線Z1上に配置されて車輪部35を回転可能に支持する車輪フレーム37と、車輪フレーム37を支持すると共に、車輪フレーム37を軸廻りに回動させて車輪部35を操向する駆動支持部38とを備えた操向装置30を、走行台車20の四隅に配設する。
(もっと読む)
走行車および走行車システム
【課題】従来の走行車では、ある走行車のスピンターン動作時に他の走行車の走行を停止させる必要があったので、走行車システムの効率低下や能力低下を招いていた。
【解決手段】車体1aの前後部に、それぞれ方向変換可能な前駆動輪2aおよび後駆動輪2bを備えた走行車1であって、前記前後駆動輪2a・2bのうち、一方の駆動輪を中心として、または前記前後駆動輪2a・2bの中間位置を中心として車体1aを旋回させることができ、かつその旋回中心を適宜選択可能とする。
(もっと読む)
車両
【課題】操舵装置の部品点数を減少して、軽量化を図ることができる車両を提供すること。
【解決手段】車輪2の接地中心Tcにおける回転速度Vtが車体フレームBFの移動速度Vcよりも高速(低速)とされると、車輪2が車体フレームBFよりも前方(後方)へ移動しようとすることで、車輪2の向きが軸受装置44を回転中心として変更され、車輪2が操舵される。これにより、従来の車両のように、ハンドルと車輪とを接続する機構、即ち、ステアリングギヤボックスやタイロッド等の部品を設ける必要がないので、部品点数を削減して、その分、車両全体としての軽量化を図ることができる。
(もっと読む)
車両及び車両の表示装置
【課題】車両の周囲に存在する障害物に関する情報を視覚的に操作者に認識させる。
【解決手段】独立操舵支援表示システムは、車両の移動の妨げとなる障害を検知する監視センサを用いて車両の周囲の状態のモニタリングを行う。そして監視センサにより障害物が検知された場合、車両と検知された障害物との相対的な位置関係に基づいて、指定された操舵モードに対応する車両の移動制限領域を特定する。また、独立操舵支援表示システムは、操舵モードにおける指定条件に基づいて、想定される車両の移動軌跡を特定する。そして、特定された車両の移動制限領域、車両の移動軌跡、車両図が示されたアシスト画面を表示させる。このような操作者の操作を支援するためのアシスト画面を、車両の移動期間、連続して更新させることにより、車両の操作との連携がとられた支援を操作者に対して行うことができる。
(もっと読む)
車両の操作装置
【課題】複数輪を独立して操舵可能な車両において、4輪を独立して操舵する独立操舵走行の操作を容易にする。
【解決手段】モード選択スイッチ21が配置されたケーシング20、ステージ30、ステージ30上に配設されステージ30に対して回転及び固定可能に配設される操作部40を備える。操作部40の上面には、液晶表示装置からなる表示部42が配設され、この表示部42には、車両図43が表示される。表示部42の上面には、タッチパネルが配設される。信地回転の場合、操作部40で回転中心を指定し、指定した回転中心を中心として回転可能に構成される。平行移動の操作の場合、水平面上の前後、左右、斜めの方向に移動可能に構成される。操作部40の動きを、平行移動、信地回転といった独立操舵固有の動きと一致させているので、操作者は、車両の動きをイメージしながら操作することが可能になる。
(もっと読む)
1 - 20 / 28
[ Back to top ]