
Fターム[3D034CE11]の内容
操向リンク系及び4WS (6,986) | 4WSの制御及び制御対象 (1,188) | 流体制御 (50)
Fターム[3D034CE11]の下位に属するFターム
油圧弁、空気圧弁による制御 (29)
Fターム[3D034CE11]に分類される特許
1 - 20 / 21
トレイラのためのステアリングのとれる単一のホイールユニット
【課題】トレイラのためのステアリングのとれる単一のホイールユニットを提供する。
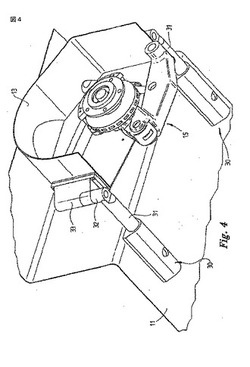
【解決手段】サスペンション機構(15)と、このサスペンション機構(15)に取着されているホイール集合体とを支持しているホイールフレームと、前記ホイールフレームと、車両本体(11)との間に取着され、車両の向きを変えるように、前記車両(11)に対して前記ホイールフレームを回動するためのステアリング手段とを有する前記車両本体(11)に取着されるように適合されている単一のホイールユニットであって、前記ステアリング手段は、2つのステアリング構成要素(30)を有し、これらステアリング構成要素は、前記ホイールフレームの前部及び後部の各々に1つずつ回動可能に取着され(32、33)、前記車両本体(11)の側面に前記前部及び後部を独立に移動するように作動されることができる、単一のホイールユニット。
(もっと読む)
同時クランプによって車輪グリップ係数を求める方法
本発明は、所与の路面上を走行している車両の車輪のグリップ状態を表す特性値を求める方法であって、次のステップを有し、即ち、車両の同一アクスルの2本の車輪に所与の同時旋回角変化を与えるステップを有し、旋回角変化は、2本の車輪について等しい大きさを有するが互いに逆方向であり、2本の車輪のうちの少なくとも1本について上記特性量を測定するステップを有することを特徴とする方法に関する。 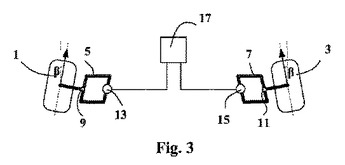 (もっと読む)
(もっと読む)
作業車

【課題】車速条件を考慮して複数の操舵モードへの移行の可否を判定することにより安全性を高めようとする。
【解決手段】操舵モード選択手段(92)の操作状態に基づいて、前輪操舵モード(FWS)、後輪操舵モード(RWS)、四輪操舵モード(4WS)を備えた作業車において、作業車の車速検出手段(VS)を設け、前記車速検出手段(VS)が所定速度未満の車速を検出し、副変速機構(7)の油圧クラッチ変速部(11)が低速位置あるときに前記後輪操舵モード(RWS)又は四輪操舵モード(4WS)への設定を許可し、前記後輪操舵モード(RWS)又は四輪操舵モード(4WS)の設定中、車速検出手段(VS)が所定速度以上の車速を検出するとき、前記副変速機構(7)の油圧クラッチ変速部(11)の低速位置から高速位置への変速を牽制する。
(もっと読む)
制御装置
【課題】タイヤの摩耗や劣化によるグリップ性能などの低下が及ぼす種々の不具合を好適に改善し得る制御装置を提供すること。
【解決手段】本発明の制御装置によれば、摩耗状態検出手段により検出されたタイヤの摩耗状態、又は、劣化状態検出手段により検出されたタイヤの劣化状態に応じて、制御範囲変更手段によって、車輪のキャンバ角の制御範囲が変更される。よって、タイヤの摩耗状態又は劣化状態に応じて、随時、未使用又はあまり使用されていない新たな面を接地面として使用させることができる。よって、タイヤの摩耗や劣化によるグリップ性能の低下などによって生じ得る危険性に対する早急な対処を可能にする。
(もっと読む)
後輪操舵制御装置
【課題】違和感のない後輪操舵を可能とする後輪操舵制御装置を提供する。
【解決手段】ハンドル操作による前輪操舵の他に、後輪操舵可能な前後輪操舵車両に用いられる後輪操舵制御装置であって、ECU14は、目標ヨーレイト演算器30により車両の横加速度Gyと車速Vとに基づいて目標ヨーレイトγtを演算し、この目標ヨーレイトγtと実ヨーレイトγとの差に基づいて後輪操舵角を制御する。
(もっと読む)
車両用制御装置
【課題】回生エネルギーの回収効率の向上を図り、低燃費性能を得ることができる車両用制御装置を提供すること。
【解決手段】回生装置による回生を行う際には、車輪の転がり抵抗がより小さくなるように、かかる車輪のキャンバ角を調整する。これにより、車両走行時の運動エネルギーを電気エネルギーに変換する際には、その変換の際に発生する変換損失(車輪の変形ヒステリシスロス)を小さくして、変換損失の低減を図ることができるので、その分、回生エネルギーの回収効率の向上を図り、省燃費性能を得ることができる。
(もっと読む)
車両用制御装置
【課題】車両をその場旋回または横行させる場合に、車輪摩耗の低減を図ることができる車両用制御装置を提供すること。
【解決手段】駆動車輪のキャンバー角をネガティブ側に調整するので、第1トレッド21の接地面積が多くなると共に、第2トレッド22の接地面積が少なくなることで、駆動車輪を路面に対してグリップし易くすることができる。これにより、駆動車輪の路面に対するスリップを抑制することができ、その分、車輪摩耗の低減を図ることができる。また、従動車輪のキャンバー角をポジティブ側に調整するので、第1トレッド21の接地面積が少なくなると共に、第2トレッド22の接地面積が多くなることで、従動車輪を路面に対して滑動し易くすることができる。これにより、従動車輪の路面に対する引きずりを抑制することができ、その分、車輪摩耗の低減を図ることができる。
(もっと読む)
車両の後輪操舵装置
【課題】システムの複雑化を防止した上で、運転者に違和感を与えることなく常に適切な後輪操舵制御を実現でき、もって旋回時の車両挙動を最適化できる車両の後輪操舵装置を提供する。
【解決手段】前輪横力センサ9fにより検出された前輪横力及び車輪速センサ8により検出された車速に基づき、前輪横力に対する後輪横力の応答遅れを模擬した2次伝達関数を含む車両の運動方程式に従って目標後輪横力を算出し、この目標後輪横力を達成するように、後輪1rの操舵アクチュエータ7を駆動制御して後輪操舵を実行する。
(もっと読む)
操舵装置
【課題】車輪のトー方向の変位を安定させて、車両の挙動を安定させることができる操舵装置を提供すること。
【解決手段】本発明による操舵装置は、車輪を回転自在に支持するナックル2と車体側とを伸縮自在に連結する伸縮手段11、12と、伸縮手段11、12を駆動する駆動手段13を備える操舵装置7であって、駆動手段13の駆動反力を支持する支持手段8を備えることを特徴とする。
(もっと読む)
車両用制御装置
【課題】車輪の制動力又は駆動力の向上を図ることができる車両用制御装置を提供すること。
【解決手段】車輪2のキャンバー角を初期位置P0から時計回りに第1の角度θ1だけ変化させる第1のキャンバー角調整動作を実行し、その後で、車輪2のキャンバー角を反時計回りに第2の角度θ2だけ変化させる第2のキャンバー角調整動作を実行する。これにより、路面と車輪2の接地面との間の接地状態が改善され、車輪2の制動力又は駆動力の向上が図られる。
(もっと読む)
車両の走行制御装置
【課題】車両が横方向に傾斜した走行路を走行する場合に於ける車体の傾斜を低減すると共に、運転者の意図しない横方向への車両の移動を抑制し、その移動抑制に必要な操舵トルクを低減する。
【解決手段】前輪と車体との間に作用する上下力を増減する上下力可変手段としてのアクティブスタビライザ装置24を有し、アクティブスタビライザ装置24は前輪のキングピン軸(52)に対しねじれの位置関係をなす作用線(68)に沿って可変力を作用させることにより上下力を増減し、前輪14FR、14FLと車体(28)とを離間させる方向に可変力を作用させることにより前輪をトーイン方向へ転舵する方向のキングピン軸周りのモーメントを発生するよう構成されており、路面の横方向の傾斜角(β)が推定され、横方向の傾斜角に基づいて路面の横方向の傾斜に起因する車体の横方向の傾斜を低減するようアクティブスタビライザ装置24による可変力が制御される。
(もっと読む)
車両の動力伝達装置、操舵装置、及び車輪支持装置
【課題】一般的な構成の動力伝達機構及び操舵機構で車両の旋回半径を小さくする。
【解決手段】エンジン6の駆動力を前輪2・3に伝達するべくエンジン側の軸部と車輪側の軸部とを2つの中間シャフト及び3つの等速ジョイントを介して連結したドライブシャフト9を有するものとする。またステアリングハンドル13の操作に応じて前輪2・3を転舵するべく車体左右方向に延在するステアリングラック11がその長手方向に伸縮可能に設けられたものとする。
(もっと読む)
車両駆動装置
【課題】車両の駆動装置において、従来のように縦列駐車のために何回もハンドルの操作をすることなしに、真横にカニの横這い走行できる車両駆動装置を提供することにある。
【解決手段】車両の全車輪を横進行方向に「ハの字 形」または「逆ハの字 形」にする車輪角度制御機構を具備し、かつ、全車輪を横進行方向に駆動する車輪駆動機構を具備する
(もっと読む)
車輪操舵用アクチュエータ故障時の劣化運転モードを有する車両操縦システム
【課題】各操舵車輪毎の1つのアクチュエータ(3AvG、3AvD、3ArG、3ArD)と、実際の操縦角度(αrAvG、αrAvD、αrArG、αrArD)のセンサと、ドライバが要求した操縦角度(θ)を出力する指令部材(2)と、操縦角度(θ)を入力変数として制御角度(αPAVG、αPAVD、αPArG、αPArD)を決定する操舵制御装置(4)とを有する、操舵車輪(1AvG、1AvD、1ArG、1ArD)を有する地上走行車両用操縦制御システム。
【解決手段】操舵車輪のアクチュエータのロックを検出し、警報信号を出す検出手段(5)を有し、操舵制御装置(4)は通常モードと劣化モードとを有し、劣化モードではロックしていない車輪の操舵制御角度(αpi)を計算し、各瞬間の車両の回転(CIR)中心がドライバーが要求した操縦角度(θ)を関数とする位置でロックされた車輪の面に対して垂直で且つ車輪と地面との接地面積の中心を通る直線上にほぼ来る劣化モードの第1の戦略を取らせる。  (もっと読む)
(もっと読む)
制御装置
【課題】 車輪の制動力又は駆動力の向上を図ることができる制御装置を提供すること。
【解決手段】 車輪2を初期位置P0から第1の操舵方向に第1の角度θ1だけ操舵する第1の操舵動作と、その第1の操舵動作の後、車輪2を第1の操舵方向とは反対方向となる第2の操舵方向に第2の角度θ2だけ操舵する第2の操舵動作とを行う。これにより、路面と車輪2の接地面との間の接地状態が改善され、車輪2の制動力又は駆動力の向上を図ることができる。例えば、雪道を走行する場合には、車輪2を左右に操舵することで、路面と車輪2の接地面との間に発生する水膜を外部に押しのけることができるので、路面と車輪2の接地面との間の密着度を高め、その分、制動力又は駆動力の向上を図ることができる。
(もっと読む)
ホイール式作業機械のステアリング装置
【課題】高速走行時に堅牢で信頼性の高い機構で2輪操舵を行い、低速走行時にハンドル操作のみで軽快に4輪操舵を行い、操作性及び信頼性に優れかつ使い勝手の良いホイール式作業機械のステアリング装置を提供する。
【解決手段】ステアリング装置20は、キャブ6内に配置されるハンドル21と前輪2L,2Rの向きを変更するタイロッド16とを操舵力伝達可能に連結し、ハンドルの回転操作に応じて前輪を操舵する機械式ステアリング手段22と、前輪及び後輪3L,3Rの向きをそれぞれ変更する複数のステアリングシリンダ23,24を有し、ハンドルの回転操作及び選択モードに応じて作動油を所定のステアリングシリンダに導いて前輪及び後輪の少なくとも一方を操舵する全油圧式ステアリング手段25と、機械式ステアリング手段及び全油圧式ステアリング手段のいずれか一方を選択的に機能させるように切り替える切替手段26とを備える。
(もっと読む)
車両用操舵装置
【課題】 旋回限界を高めることができる車両用操舵装置を提供する。
【解決手段】 車両には、ステアリングホイール10に接続されたステアリングギヤボックス7と、ステアリングギヤボックス7の左右に接続されたアクチュエータ6,8と、が搭載される。アクチュエータ6,8は、車両旋回時に、コントロールユニット16の実舵角の調節指令に従って伸縮することで、旋回内輪の実舵角よりも、旋回外輪の実舵角を大きくする。これにより、荷重移動に伴って輪荷重が増大する旋回外輪に、より大きな横力を発生させることができるので、両輪の横力平均を高めることができ、より高横加速度領域でもコーナリングパワーが得られ、車両の操舵性に優れる。
(もっと読む)
走行車両の操向装置
【課題】4WS、FWS、RWSの3つの操向モードのステアリングシステムの選択が可能な操向装置を提供する。
【解決手段】ステアリングシャフト25のモード切替ギヤ38との係合/非係合により、4WS、FWS、RWSの3つの操向モードのいずれかを選択可能な前輪側ギヤ37aと後輪側ギヤ37bをそれぞれ複数枚備えたギヤ機構Aと、前記3つのモードの選択をするための3つの操向モード選択スイッチ47~49と、該スイッチ47~49の中の選択された操向モードに対応したギヤ位置に前輪側ギヤ37aと後輪側ギヤ37bとステアリングシャフト25に設けられたモード切替ギヤ38とを係合させる制御装置と前記3つの操向モードの中の選択された操向モードに対応させて前記ギヤ機構Aの前輪側ギヤ37aと後輪側ギヤ37bを介してそれぞれ前輪11及び後輪12に油圧ポンプ2からの圧油を供給する前輪側油圧式操舵ユニット30aと後輪側油圧式操舵ユニット30bとを備えている。
(もっと読む)
多目的農作業車
【課題】女性でも農作業車の操作が容易にでき、同時に農作業車への種子の積込量の増大化にも対応できる多目的農作業車を提供する。
【解決手段】メインフレーム1と、エンジンフレーム3と、後部のリアホイール支持フレーム4とで枠体を構成する。前輪支持軸2は、ステアリングモータ7により減速機構を介して回転可能に取付けられ、又前輪支持軸2の下部にはエンジンフレーム3上に搭載されたエンジン19からHST変速モータ22に連結された減速機構を介して駆動されるエンドレスの駆動用ゴムローラ10が装着される。エンジンフレーム3上にはエンジン19と動力伝達機構が搭載され、リアホイール支持フレーム4はメインフレーム1の後部にこれと直交して水平に装着され、リアホイール支持フレーム4内にはステアリング電動シリンダ29とステアリングタイロッドを介し方向変換可能な一対のリアホイール27が装着される。
(もっと読む)
操舵制御装置
【課題】 運転者の感じるリヤグリップ感を向上させて良好な操舵特性が得られる操舵制御装置を提供する。
【解決手段】 操舵角δ(図3(a)参照)をもとに、操舵角速度ωを検出し(図3(b)参照)、所定のしきい値ωthを超えた時点(t1)の操舵角速度の時間変化量(操舵角加速度ζ)から旋回開始時点(t1からtb遡った時点)を推定し、その時点からΔtth1〜Δtth2経過した時点における後輪転舵角θRの修正角ΔθRとして前輪と同位相方向の転舵量を設定し、設定した修正角ΔθRを付加した後輪転舵角θRとなるよう後輪の転舵量を制御する。
(もっと読む)
1 - 20 / 21
[ Back to top ]