
Fターム[3D037FA13]の内容
補機駆動、推進制御及び安全装置 (4,671) | 推進制御装置・安全装置の入力信号 (984) | 車外の状態によるもの (92)
Fターム[3D037FA13]の下位に属するFターム
Fターム[3D037FA13]に分類される特許
1 - 18 / 18
坂道発進補助制御装置
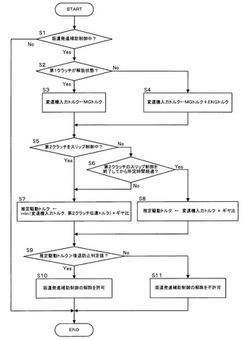
【課題】坂道発進補助制御が無用に解除されることを防止できる坂道発進補助制御装置を提供する。
【解決手段】車両が登坂路で停止状態であるときにドライバーがブレーキペダルから足を放しても車両が後退しないように制御する後退防止制御部(S1)と、駆動輪に伝達される駆動トルクを、モータージェネレーターと駆動輪との間に配置される駆動輪側クラッチが解放され始めてから再び締結されて所定時間が経過するまでは駆動輪側クラッチの伝達トルクと変速機への入力トルクとのいずれか小さいトルクに基づいて推定し、所定時間が経過した後は変速機への入力トルクに基づいて推定するトルク推定部(S7,S8)と、推定された駆動トルクが後退防止判定値よりも大きいか否かを判定する判定部(S9)と、推定された駆動トルクが後退防止判定値よりも大きいときには後退防止制御部による制御の中止を許可する後退防止制御中止部(S10)と、を備える。
(もっと読む)
緊急退避装置

【課題】道路の形状に対応して自車両を停止させることが可能な緊急退避装置を提供する。
【解決手段】緊急退避制御ユニット30は、ナビゲーションシステム22、インフラ情報取得センサ24、ミリ波センサ26及び前方認識カメラ28が取得した自車両1が走行する道路の形状に関する道路形状情報に応じて自車両1を停止させる停止位置を決定し、車室内カメラ12等が検出した運転者の意識レベルが設定された閾値以下であるときに、スロットル制御ユニット32、ブレーキ制御ユニット34及びステアリング制御ユニット36が決定した停止位置に自車両1を停止させる。これにより、道路の形状に対応して自車両1を停止させることが可能となる。
(もっと読む)
産業車両のための非常停止レバー配置構造
【課題】 産業車両において非常停止レバーの操作性を向上させる。
【解決手段】 非常停止レバー7をフォークリフト前後方向に配設し、グリップ70を運転席2に配置する。バッテリーとコントローラの間を接断するリセプタクル8Bに係止部15を設け、レバー中間部7Cを係止部15に係止させる。レバー前端部7Aを、車両前部の側面の回転自在な支軸部16に連結する。操作者がグリップ70を下方に押し込むと、レバー前端部7Aが支軸部16の回りを回動して、非常停止レバー7が下方に揺動し、レバー中間部7Cが係止部15を介してリセプタクル8Bを下方に移動させる。逆に、グリップ70を上方に引き上げると、レバー前端部7Aが支軸部16の回りを回動して、非常停止レバー7が上方に揺動し、レバー中間部7Cが係止部15を介してリセプタクル8Bを上方に移動させる。これにより、バッテリーおよびコントローラ間が接断される。
(もっと読む)
車載装置
【課題】駐車場などの施設内において、自車両の急発進を抑止する車載装置を提供する。
【解決手段】自車位置検出部11で検出した自車位置と、地図データ記憶部12から、自車両が施設に進入したと判定されると、ナビゲーション装置1はエンジン制御装置3に対して、燃料噴射量の上限を、自車両が急発進しない程度の量である所定の量に制限するよう指示する。指示を受けたエンジン制御装置3は、燃料噴射量の上限を所定の量に設定する。自車両から道路までの距離が所定の距離以下になり、方向指示器4の点滅が行われたことを示す信号が車体制御装置2からナビゲーション装置1へ送信されると、ナビゲーション装置1は、燃料噴射量の制限を解除する。
(もっと読む)
脇見運転検出警報システム
【課題】
脇見運転によって危険が予測され、警報発令が必要な時にのみ脇見運転の警報を発令する脇見運転検出警報システムを提供する。
【解決手段】
車両に搭載したカメラと、前記カメラによって運転者を撮影し、撮影された画像データを処理して前記運転者が注視している視野を判定する視線検出部と、車両に搭載したレーダーと、前記視線検出部とのデータに基づき、前記運転者が注視していない方向にレーダー探索方向を設定して前記運転者が注視していない方向の障害物を探索する障害物探索部と、前記障害物探索部が障害物を検出した場合に、脇見運転警報を発するかどうかを判定し警報を発令する警報設定部と、を含んで構成されることを特徴とする脇見運転検出警報システム。
(もっと読む)
飲酒運転防止システム
【課題】 利便性の良好な飲酒運転防止システムを提供する。
【解決手段】 車両が始動時に車両利用者の飲酒状態を判定し、この判定結果に基づいて車両の走行を許可または禁止するように制御する飲酒運転防止システムであって、前記車両に搭載され車両位置を計測する位置検出手段1と、位置検出手段1によって計測された車両位置と地図情報とを照合し、前記車両が予め定められた飲酒に関与するエリア内であるか否かを判定するエリア判定手段2と、エリア判定手段2の判定結果に応じて、異なる判定方法にて前記車両利用者の飲酒状態を判定する飲酒状態判定手段3と、を備えてなる。
(もっと読む)
飲酒検出装置
【課題】飲酒検出の煩わしさを低減することができると共に、飲酒の可能性がある場合には、飲酒検出を行なって飲酒運転を防止することができるようにする。
【解決手段】車両位置情報取得部22によって自車両の停止位置を示す車両位置情報を取得する。再検出間隔設定部28によって、車両位置情報と、検出履歴データベース26の自車両のドライバの飲酒状態の検出結果の履歴に基づいて再検出間隔時間を設定する。そして、検出実行判定部32によって、設定した検出間隔時間が、停止時間計測部30によって計測された停止時間以下である場合、ドライバの飲酒状態の検出を行なうと判定する。飲酒状態の検出を行なうと判定された場合、飲酒検出部34によって、ドライバの飲酒状態を検出する。
(もっと読む)
運転者支援装置
【課題】個々のドライバに応じて適切な支援を行う運転者支援装置を提供する。
【解決手段】車両周辺に存在する予め定められた対象物の位置を含む対象物情報を検出する対象物情報検出手段と、前記車両を運転する運転者の視線の方向、及び当該方向を前記運転者が目視していた時間を含む視線関連情報を検出する視線関連情報検出手段と、前記運転者の記憶保持時間を示す記憶保持時間情報が予め記録された記録手段と、前記対象物検出手段により検出された前記対象物情報、前記視線関連情報検出手段により検出された前記視線関連情報、及び前記記録手段により記録された前記記憶保持時間情報に基づき危険度を算出する算出手段と、前記算出手段により算出された危険度が予め定められた閾値を超えた場合に、前記運転者に対して警告を発生する警告発生手段と、を有する。
(もっと読む)
飲酒運転防止装置
【課題】車両の走行を抑止する制御の解除が適切なタイミングで可能となるようにした上で飲酒運転を確実に防止する飲酒運転防止装置を提供する。
【解決手段】ドライバーの飲酒状態が飲酒状態判断部12により検知された場合に車両の走行を抑止する制御を行う車両制御部13を備えて当該ドライバーによる当該車両の飲酒運転を防止する飲酒運転防止装置1であって、緊急事態の発生を検出する緊急信号受信機14と、ドライバーの飲酒状態が検知され、且つ、緊急信号受信機14により緊急事態の発生が検出された場合に、車両制御部13による制御を解除させることを可能にする車両制御解除機構部16と、を備える。
(もっと読む)
ドライバ状態判別装置、および運転支援装置
【課題】ドライバの状態を詳細に判定したりまたはその判定結果を用いてドライバの運転支援を行うことが可能な装置を提供する。
【解決手段】ドライバ状態判別装置10は、ドライバの車両操作の反応遅れを検出する操作遅れ検出手段22と、ドライバの車両操作の速度を検出する操作速度検出部23と、操作遅れ検出部22の検出結果および操作速度検出部23の検出結果の組合せに基づいてドライバの異常状態を判別する判別手段24と、を備える。
(もっと読む)
連結式車両用電子防止機構
【課題】連結車両におけるジャックナイフ現象などの兆候を検出し様々な防止処置が取れるシステムを提供する。
【解決手段】連結式車両用電子防止システムは、第1のヨーイング軸周りの牽引部分のヨーイング回転速度を検出するように構成された牽引部センサ108と、第2のヨーイング軸周りの被牽引部分のヨーイング回転速度を検出するように構成された被牽引部センサ106と、牽引部センサ108および被牽引部センサ106に接続された処理装置110とを備え、処理装置110が、牽引部センサ108および被牽引部センサ106から受信したデータに少なくとも部分的に基づいて、いつ修正制御を開始するかを決定する。
(もっと読む)
追従制御装置
【課題】 周辺環境に適した車間距離を確保して走行することを可能にする追従制御装置を提供する。
【解決手段】 追従制御装置1は、車両に搭載されたECU2を備えている。ECU2は、メモリ部13に記憶されたドライバ好み車間距離マップから、ドライバの好みに応じた車間距離を設定する車間距離設定部15と、前方レーダ9及び後方レーダ10の検出信号に基づいて、自車両と周辺車両との車間距離等を求める周辺車両検出部16と、自車両と周辺車両との車間距離等に基づいて、周辺車両の走行状態に応じた車間距離を求める車間距離設定部17と、ドライバの好みに応じた車間距離と周辺車両の走行状態に応じた車間距離とを用いて、自車両と先行車両との目標車間距離を求める目標車間距離設定部18と、目標車間距離に応じて速度を制御する速度制御部20とを有している。
(もっと読む)
監視装置および方法、記録媒体、並びに、プログラム
【課題】ドライバにとって眩しい状態を正確に検出する。
【解決手段】基準高さ検出部722は、室内監視カメラ111により撮像された画像のドライバの目の周辺の領域の輝度値が所定の閾値より低い場合にトラッキング部121により検出されたドライバの目の高さに基づいて、基準高さを検出する。状態検出部723は、ドライバの目の周辺の領域の輝度値が、所定の閾値以上高い方向に変化した場合、ドライバの目の高さが基準高さの所定の範囲内である状態が所定の時間継続したとき、ドライバの目に強い光が照射されている状態に遷移したと判定する。本発明は、運転支援装置に適用できる。
(もっと読む)
内燃機関の燃料噴射制御方法
【課題】トラクションコントロールのために燃料カットにより内燃機関の出力を下げる燃料噴射制御において、触媒を保護するために燃料を増量している場合には燃料カットをすることにより燃料カットを行った気筒からの空気と増量に起因する未燃焼燃料とにより触媒の温度が上昇する場合があった。
【解決手段】排気系に触媒を備える多気筒の内燃機関の一部の気筒への燃料供給を中止してトラクションコントロールを実行するものにおいて、トラクションコントロールの実行中にトラクションコントロールとは無関係に内燃機関の運転状況に応じて燃料を増量している場合で、かつ内燃機関の負荷及び/又は機関回転数が低い場合に燃料の増量を中止し、トラクションコントロールの実行中にトラクションコントロールとは無関係に内燃機関の運転状況に応じて燃料を増量している場合で、かつ燃料の増量を中止しても触媒の温度が上昇する運転領域で運転している場合は燃料の供給を中止する気筒の数を増加させる。
(もっと読む)
車両およびその制御方法
【課題】駆動輪に動力を出力可能なモータと、モータと電力をやりとりするバッテリとを備える車両において、運転者にショックを与えるのを抑制すると共にバッテリに過大な電力が入出力されるのを抑制する。
【解決手段】TRCスイッチがオフのときには(S140)、車速が大きいほど滑らかに小さくなる傾向に目標スリップ速度Vslip*を設定すると共に(S160)、スリップ速度Vslipと目標スリップ速度Vslip*との偏差に基づくトルク制限係数αを用いて要求トルクTd*を制限したトルクをモータ22から駆動輪に出力する(S170〜S200)。これにより、車速の変化に伴って駆動輪に出力されるトルクが急変するのを抑制することができる。この結果、運転者に違和感を与えるのを抑制することができる。また、モータの駆動状態が急変することによってバッテリに過大な電力が入出力されるのを抑制することができる。
(もっと読む)
センサに基づく車両の始動制御方法及び運転者支援システム
本発明は、車両の前方領域がセンサ装置(12、14)を用いて検出され、車両の停止後に、交通状況が許す場合に自動的に始動許可信号(F)が出力される、車両を始動制御する方法において、センサ装置(12、14)のデータから、車両の前方領域における車道の特徴が抽出されており、前記車道の特徴に基づいて、車道が空いていることを積極的に表す少なくとも1つの(始動)許可基準が検査されることを特徴とする、車両の始動制御方法に関する。 (もっと読む)
車載警報装置
【課題】 カメラの撮像画像に基づく運転者の脇見検出が不可能な状況になった場合においても適切に警報制御を実行することにある。
【解決手段】 運転者の顔を撮影するためのカメラの撮像画像に基づいて運転者の視線方向を検出させ、その視線方向が正面方向にあるときは前方障害物との衝突可能性が基準しきい値レベルに達してから、一方、その視線方向が正面方向にないときは前方障害物との衝突可能性が上記の基準しきい値レベルよりも低いしきい値レベルに達してから、車両運転者に向けて警報表示ディスプレイによる警報表示及び警報ブザーによるブザー吹鳴の一次警報を行わせる。また、カメラ故障時や運転者の視線方向自体が検出されない場合(ステップ100の肯定判定時)は、衝突可能性が基準しきい値レベルに達してから上記の一次警報を行わせる(ステップ104)。
(もっと読む)
前方道路情報送出システム
【課題】 システムが実際に走行制御や警報動作を行わせる実働領域を広げる。
【解決手段】 前方道路情報送出システム1は、自車両の進行方向に分岐点や交差点が存在し、それら分岐点や交差点から先の複数の進行候補道路に対応して複数の前方道路情報を作成した場合であっても、それら作成された複数の前方道路情報が類似しているか否かを判定し、類似している旨を検出すると、複数の前方道路情報のいずれかを走行制御装置8〜11や警報装置12へ送出して走行制御動作や警報動作を行わせる。分岐点や交差点の付近から先の道路に対する走行制御動作や警報動作を行わせることができ、システムが実際に走行制御動作や警報動作を行わせる実働領域を広げることができる。
(もっと読む)
1 - 18 / 18
[ Back to top ]