
Fターム[3D041AA48]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | スリップ防止 (310) | トラクション制御 (159)
Fターム[3D041AA48]に分類される特許
1 - 20 / 159
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
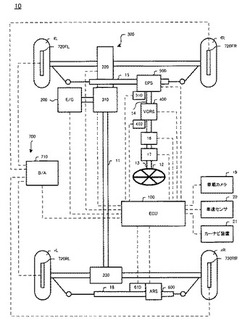
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
ハイブリッド車両の制御装置

【課題】 車両負荷が大きいときに第2クラッチの過剰な発熱を抑制可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータの間に第1クラッチを有し、モータと駆動輪の間に第2クラッチを有するハイブリッド車両において、車両負荷が所定値以上のときは、エンジンを作動させた状態で第1クラッチを解放し、モータをエンジン回転数よりも低い回転数として第2クラッチをスリップ締結することとした。
(もっと読む)
車両制御システム及び車両制御装置
【課題】タイヤの状態を適正に制御することができる車両制御システム及び車両制御装置を提供することを目的とする。
【解決手段】車両2の車輪3に生じる制動力を調節可能な制動力調節手段7と、車輪3に装着されるタイヤ13の温度を検出する検出手段14と、タイヤ13の温度に基づいて、制動力の増減の周期を可変とする制御装置8とを備えることを特徴とする。したがって、タイヤ13の状態を適正に制御することができる、という効果を奏する。
(もっと読む)
車両の統合制御装置
【課題】スプリットμ路を素早く検出し、適切なタイミングで車両の制御を実行する。
【解決手段】メイン制御部1で、左右のCCDカメラ1aにより得られた撮像画像を基に前方走行路がスプリットμ路であるいか否か判定し、前方走行路がスプリットμ路と判定された場合、衝突防止制御部2で設定するブレーキ介入距離を補正するブレーキ介入距離補正ゲインGBRを増加補正して、衝突防止制御部2は、このブレーキ介入距離補正ゲインGBRで補正したブレーキ介入距離を用いて通常より早いブレーキタイミングで衝突防止制御を行う。一方、前方走行路がスプリットμ路と判定された場合、エンジン制御部3で設定する目標トルクTtを補正する目標トルク補正ゲインGTを減少補正して発生する駆動力により、左右で異なった路面μによって車両にヨーモーメントが発生して車両が不安定になることを防止する。
(もっと読む)
車両
【課題】車両の進路上の路面変化に対応した適切な駆動力配分を前以て実現することができる車両を提供する。
【解決手段】車両のメインECU3は、第1情報取得部4Aにより取得された第1情報から導出される第1位置の路面摩擦係数である第1摩擦係数μ1と、第2情報取得部4Bにより取得された第2情報から導出される第2位置の路面摩擦係数である第2摩擦係数μ2とから、車両の総駆動力の目標値を決定する。そして、総駆動力の目標値を満たし且つ第1摩擦係数μ1に対応したスリップ限界を超えないように、第1駆動力および第2駆動力の目標値を決定する。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
車両の協調制御装置
【課題】 横滑り防止装置およびトラクションコントロール装置を協調制御する際に、車両の加速性能および旋回挙動性能の両立を図る。
【解決手段】 横滑り防止装置VSAおよびトラクションコントロール装置TCSを協調制御する協調制御手段が、駆動輪WRL,WRRの車輪速と車体速とを比較して該駆動輪WRL,WRRのスリップ量を算出し、スリップ量が閾値以上の場合にはトラクションコントロール装置TCSを横滑り防止装置VSAに優先して作動させるので、先ずトラクションコントロール装置TCSでスリップ量が過大な状態を解消して旋回挙動制御の制御性を高めることができ、またスリップ量が閾値以上の場合には横滑り防止装置VSAをトラクションコントロール装置TCSに優先して作動させるので、車両の加速性能を最大限に確保しながら横滑り防止装置で旋回挙動を安定させることができる。
(もっと読む)
車両の協調制御装置
【課題】横滑り防止装置およびトラクションコントロール装置の作動が抑制されたときに協調制御が的確に行う。
【解決手段】スイッチSWが横滑り防止装置VSAおよびトラクションコントロール装置TCSの作動を抑制する位置にあるとき、リヤディファレンシャルギヤDrのヨーモーメント付加要求量および横滑り防止装置VSAのヨーモーメント付加要求量の符号が同一の場合には、絶対値が大きい方からリヤディファレンシャルギヤDrのヨーモーメント制御量を算出し、両ヨーモーメント付加要求量の符号が異なる場合には、横滑り防止装置VSAのヨーモーメント付加要求量からリヤディファレンシャルギヤDrのヨーモーメント制御量を算出する。横滑り防止装置VSAおよびトラクションコントロール装置TCSの作動が抑制された状態でも協調制御による高い精度でヨーモーメント制御量を算出し、単独制御する場合に比べて良好な車両挙動を維持できる。
(もっと読む)
車両の運動制御装置
【課題】過渡操舵(レーンチェンジ挙動)が行われる場合において、運転者へ違和感を与えることなくステア特性制御を確実に実行して車両の安定性を確保すること。
【解決手段】直進状態から、一旋回方向側において急激なステアリングホイールの切り込み・切り戻し操作(第1操舵)が行われ、その後に連続して他旋回方向側においてステアリングホイールの切り込み・切り戻し操作(第2操舵)が行われる場合を想定する。第1操舵中は第1演算特性MP1に基づいてステア特性が調整され、第2操舵中は第2演算特性MP2に基づいてステア特性が調整される。第1操舵中において旋回変化量dJr(操舵角速度)が所定値を超えたとき、第2演算特性MP2がよりアンダステア側の特性に直ちに修正される。即ち、第1操舵に連続する第2操舵が開始される前にて、第2操舵に対応するステア特性制御の目標特性がよりアンダステア側の特性に予め修正される。
(もっと読む)
車両制御装置
【課題】 スムーズな発進を行うことができる車両制御装置を提供する。
【解決手段】 ドライバのブレーキペダル操作無しでもホイルシリンダ液圧を保持し所定の条件が成立したときに液圧を減圧するブレーキCUと、エンジン32の駆動力を前輪FL,FRと後輪RL,RRとに対して任意の割合で配分可能な4WDカップリング39と、所定の条件が成立したとき、後輪RL,RRへの駆動力配分量を増加させる駆動力配分変更部33cと、を備えた。
(もっと読む)
車両挙動制御装置
【課題】 スラローム走行時等における円滑な制御を実現した車両挙動制御装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS24でベース係数Kbに遅延フィルタ処理を行ってフィルタ係数Kfを算出/設定した後、ステップS25でベース係数Kbとフィルタ係数Kfとを和すことで係数合算値Ksを求める。次に、ATTS−ECU16は、ステップS26で係数合算値Ksが判定閾値Kthより大きいか否かを判定し、この判定がYesであればステップS27で不感帯係数Knを1とする。これにより、駆動力配分制御において制御指示ベース値Dbがそのまま目標駆動力配分制御値Dtgtとなる。なお、判定閾値Kthは、十分に小さな値に設定されている。
(もっと読む)
車両制御装置
【課題】 坂路における車速制御の応答性を高めることができる車両制御装置を提供する。
【解決手段】 各車輪FL,FR,RL,RRに制動力を発生させるホイルシリンダW/Cと、路面の勾配を検出するコンバインセンサ33と、路面勾配に応じた駆動力を演算し、設定された制御目標速度になるように前輪FL,FRに対して駆動力を作用させる速度制御中であって、路面勾配とは別の路面状態(路面μ)に応じて演算された制動力を発生させ、車輪の回転速度を制御する液圧ユニット31と、液圧ユニット31をコントロールするブレーキCU32と、を備えた。
(もっと読む)
車両の制振制御装置
【課題】 車両の制振制御等に於いて、参照される車輪トルクを推定する際にその推定が良好に実行できない事情を考慮して制御を実行すること。
【解決手段】 本発明の車両の駆動力を制御することにより車両のピッチ又はバウンス振動を抑制する制振制御装置は、車輪と路面との接地個所に於いて発生する車輪に作用する車輪トルク推定値を取得する車輪トルク推定値取得部と、車輪トルク推定値に基づいてピッチ又はバウンス振動振幅を抑制するよう車両の駆動力を制御する駆動力制御部とを含み、更に、車輪のスリップ状態を示す車輪スリップ状態量を取得するスリップ状態量取得部が設けられ、車輪スリップ状態量が表すスリップの程度が大きいほど駆動力の制御量を小さく補正することを特徴とする。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】高μ路側に接地している車輪の低μ路側への移動を抑制し、車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】ヨーモーメント演算部18が、車両がスプリットμ路を走行しているときに、車輪に制動力が発生した場合、左右の車輪間の当該制動力の差によって車両に発生するヨーモーメントを算出する。また、制動時前後輪舵角演算部21が、ヨーモーメントが第1設定値以上である場合には、前記目標ヨーレイトを低減する。さらに、当該ヨーモーメントが第2設定値未満である場合と比較して、目標横減速度を低減する。
(もっと読む)
車両運動制御装置
【課題】車両挙動を制御する複数のデバイスが共有するセンサの故障時における車両挙動の安定化を実現する。
【解決手段】CANを介して車両制御を行うデバイス1・デバイス2・デバイス3と、ヨーレートセンサ4とが接続され、各デバイスはそれぞれの運動制御にヨーレート検出値を用いる。ヨーレートセンサの故障を例えばデバイス3が検知した場合には、他のデバイス2・3がその故障を検知していない場合でも、ゲインを低減する。1つのデバイスの制御停止により残りのデバイスがそれを補うために制御量を大きくして車両挙動に悪影響を及ぼしてしまう場合でも、ゲインの低下により、その影響を小さくすることができ、車両運動の安定化を保持できる。また、残りのデバイスにおいてもセンサ故障が確定して制御停止に移行する場合にも、小さなゲインにより制御量を下げておいた状態から機能停止することができるため、車両挙動の急変を抑制することができる。
(もっと読む)
車両の駆動力制御装置
【課題】 路面の状態を精度良く判定して車両の駆動力を制御することで、車輪のスリップを確実に抑制する。
【解決手段】 第1低摩擦係数路面判定手段で全車輪の車輪速のうちの最高車輪速および最低車輪速から低摩擦係数路面を判定し、第2低摩擦係数路面判定手段で前輪の車輪速および後輪の車輪速から低摩擦係数路面を判定し、第3低摩擦係数路面判定手段で左駆動輪の車輪速および右駆動輪の車輪速から低摩擦係数路面を判定し、第4低摩擦係数路面判定手段でエンジンの駆動力から算出した規範車体加速度をディファレンシャルギヤの回転数から算出した実車体加速度と比較して低摩擦係数路面を判定し、かつ統合低摩擦係数路面判定手段で第1〜第4低摩擦係数路面判定手段の判定結果に基づいて低摩擦係数路面を統合判定するので、第1〜第4低摩擦係数路面判定手段の各々の長所を活かして短所を補いながら低摩擦係数路面を精度良く判定することができる。
(もっと読む)
車両の運動制御装置
【課題】日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】車両の横滑り情報から算出したヨーモーメント制御指令に基づいて、四輪のうちの左右輪に異なる制駆動力を発生するモードで実現される車両前後加速度が、横運動に連係した加減速制御指令との差が近くなるように四輪のうちの左右輪に略等しい制駆動力を加えるように補正制御する。
(もっと読む)
駆動力制御装置
【課題】運転者の操作遅れ等も加味して各輪に駆動力を配分することができる駆動力制御装置を提供することを課題とする。
【解決手段】本装置は、地図情報から、現在と先方のコーナー曲率を得て各々で規範ヨーレートを演算し、運転者のハンドル操作から運転者が望むヨーレートを演算し、現在車両で発生しているヨーレートを求め、これら3つのヨーレートの各々の差分から必要ヨーモーメントを求め、当該必要ヨーモーメントに現在の車両状態を引数として決定した重み係数を掛けたものの和を駆動力差による要求ヨーモーメントとし、当該要求ヨーモーメントより各輪の駆動力を求める。
(もっと読む)
車両のバネ上制振制御装置
【課題】適切な条件下でバネ上制振制御を介入させること。
【解決手段】路面からの入力又は運転者要求トルクに伴い車体に発生するバネ上振動を抑制させる為のバネ上制振制御量の設定を行うバネ上制振制御手段(バネ上制振制御部3)と、そのバネ上制振制御量を実現させるように車両駆動装置(エンジン20や変速機30)の出力を制御してバネ上制振制御を実行する駆動制御手段(駆動制御部2)と、を備えた車両のバネ上制振制御装置において、車両10の運転状態、車両10の状態又は運転者要求の内の少なくとも何れか1つに応じて、バネ上制振制御の実行を許可又は禁止すること。
(もっと読む)
車両の駆動力制御装置及びその方法
【課題】主駆動輪のスリップ時に従駆動輪を最適に制御することである。
【解決手段】車両の駆動力制御装置は、主駆動輪がスリップしたらモータの駆動によって従駆動輪を駆動するものであり、主駆動輪の駆動力とモータ4の駆動によって駆動される従駆動輪の駆動力との加算値として車両総駆動力を算出し(ステップS690)、車両総駆動力の増加方向に主駆動輪のスリップ状態を制御する(ステップS700、ステップS710、ステップS720)。
(もっと読む)
1 - 20 / 159
[ Back to top ]