
Fターム[3D041AA65]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | ブレーキ性能向上 (160)
Fターム[3D041AA65]に分類される特許
1 - 20 / 160
自動車
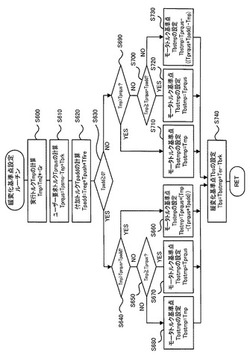
【課題】要求トルクの変化を制限する緩変化処理で用いるトルクの基準点を適正に設定する。
【解決手段】付加トルクTpaddが値0以上の場合、緩変化基準点Tbsとして、実行トルクTmpがシステム要件トルク(Tprqus+Tpadd)よりも大きいときには実行トルクTmpから付加トルクTpaddを減じたトルクを設定し、実行トルクTmpがシステム要件トルク以下でユーザー要求トルクTprqus以上のときにはユーザー要求トルクTprqusを設定し、実行トルクTmpがユーザー要求トルクTprqus未満のときには実行トルクTmpを設定する。これにより、緩変化基準点Tbsに付加トルクTpaddが反映されないようにすることができるから、運転者の意図しないトルクが出力されるのを防止することができ、ドライバビリティの向上を図ることができる。
(もっと読む)
車両の補助制動装置

【課題】補助制動装置が作動中でもアクセルペダルの踏み込み量に応じた制動力が得られ、頻繁な加速・減速の繰り返しを防止して、省燃費運転を実現する車両の補助制動装置の提供。
【解決手段】車両電子制御ユニット(10)及びその他の電子制御ユニット(20、30)を有し、車両電子制御ユニット(10)とその他の電子制御ユニットは車両内通信システム(L123)により接続されており、補助制動スィッチ(5)のスイッチ位置を検出する補助制動スイッチ位置検出装置(5S)と、アクセルペダル(4)の踏み込み量を計測するアクセルペダル踏み込み量計測装置(4S)を有している。
(もっと読む)
車両制御装置
【課題】ブレーキ温度の上昇をより効率良く抑制することが可能な車両制御装置を提供する。
【解決手段】本実施形態の車両制御装置1において、車両の駆動力を制限するECU20及びアクセルアクチュエータ32は、車速センサ14が検出した車両が制動を開始する時の車速である制動開始車速Vに基づいて、車両の駆動力を制限する制限率を変更する。このため、車両が加速、制動、加速、制動を繰り返して走行する際に、制動開始の車速が変動したとしても、制動開始の車速に応じて駆動力が制限され、ブレーキ温度の上昇を効率良く抑制することができる。
(もっと読む)
車両用制御装置
【課題】自動変速機により、アップシフトが行われている際に、ドライバからの制動要求があった場合に、制動要求に応じた制動力を適切に発生させることのできる車両用制御装置を提供すること。
【解決手段】モータジェネレータ20と、前記モータジェネレータと駆動輪54との間に介装され、締結要素の締結解放により複数の変速段を達成する自動変速機40と、摩擦力により制動力を発生する摩擦ブレーキと、を備える車両に対して制御信号を出力する車両用制御装置であって、ドライバからの制動要求に応じて、前記モータジェネレータによる回生制動および前記摩擦ブレーキによる摩擦制動を制御することで、回生協調制御を行う回生協調制御手段と、前記自動変速機により、アップシフトが行われている場合に、前記モータジェネレータによる回生制動を禁止する禁止手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
火花点火内燃機関
【課題】ハイブリッド車両の火花点火内燃機関において、車両減速時にモータ・ジェネレータを発電機として作動させることができないときに、火花点火内燃機関の振動及び騒音の増大を抑制して比較的大きなエンジンブレーキを発生させる。
【解決手段】モータ・ジェネレータと共にハイブリッド車両に組み込まれる火花点火内燃機関において、機械圧縮比可変機構を具備し、車両減速時に前記モータ・ジェネレータを発電機として作動させることができないときには(ステップ102)、自動変速器により機関回転数を高める(ステップ109)と共に機械圧縮比可変機構により実圧縮比を低下させる(ステップ108)。
(もっと読む)
車両の制御装置
【課題】走行抵抗が急低下したとき、加速度の急変を抑えつつ、ドライバの意図に合致した駆動力制御を行うことができる車両の制御装置を提供すること。
【解決手段】電気自動車1は、アクセル開度センサ7と、走行抵抗演算部12と、走行抵抗急低下判断部14aと、単調増加変数演算部13cと、電子コントロールユニット5と、を備えた。走行抵抗演算部12は、車両走行中、外乱による走行抵抗推定値FDを検出する。走行抵抗急低下判断部14aは、車両走行中、走行抵抗の急低下を検出する。単調増加変数演算部13cは、走行抵抗の急低下を検出したとき、アクセル開度に基づいて車両駆動力の単調増加変数を設定する。電子コントロールユニット5は、単調増加変数と走行抵抗推定値FDに基づいて目標車両駆動力を設定し、タイヤへ加える駆動力抑制により、実車両駆動力を前記目標車両駆動力に収束させる制御を行う。
(もっと読む)
車両制駆動制御装置
【課題】上り坂の道路で車両のずり下がりを抑制する技術において、推定路面勾配の誤差によって車両のずり下がりが発生してしまう可能性を低減する。
【解決手段】ずり下がり防止処理実行部46は、上り勾配路において車両の後方へのずり下がりが発生する可能性があると判定するまでは、FF演算部41を制御することで、目標車軸トルクのFF演算分を、走行抵抗に対抗して車両が目標加速度を実現するために必要な車軸トルクの推定値に到達するように算出して出力させ、また、ずり下がりが発生する可能性があると判定した後は、FF演算部41を制御することで、目標車軸トルクのFF演算分を、上記必要な車軸トルクの推定値よりも所定量αTだけ減少させた車軸トルクに到達するように算出して出力させると共に、所定量αTの減少の効果の相殺を防ぐために、FB演算部42における目標車軸トルクのフィードバック演算分の上昇を制限する。
(もっと読む)
制動制御装置
【課題】車両が停止する直前に車両の減速度を低下して車両の揺り戻しを抑える制御において、上り坂で車両がずり下がってしまう可能性を低減することを目的とする。
【解決手段】車両が上り勾配道路において減速した場合t2〜t3に、車両の減速に伴いゼロに近づくブレーキ要求車軸トルク65を算出して揺り戻しを低減する。またその後の開始タイミングt3において、ブレーキ要求車軸トルク65の初期値B0、最終値B1、および補正期間tdを決定し、当該開始タイミングt3から補正期間tdの間、ブレーキ要求車軸トルクを初期値B0から最終値B1まで低下させる。また、車輪速センサ7の検出信号に基づいて検出した車両の検出車速が最後に検出限界最小車速Vc以上だった限界時刻t3以前における検出車速の変化に基づいて、車両の実車速がゼロになる停止時刻t4を推定し、上記開始タイミングt3から当該停止時刻t4までの期間を補正期間tdとする。
(もっと読む)
車両の協調制御装置
【課題】横滑り防止装置およびトラクションコントロール装置の作動が抑制されたときに協調制御が的確に行う。
【解決手段】スイッチSWが横滑り防止装置VSAおよびトラクションコントロール装置TCSの作動を抑制する位置にあるとき、リヤディファレンシャルギヤDrのヨーモーメント付加要求量および横滑り防止装置VSAのヨーモーメント付加要求量の符号が同一の場合には、絶対値が大きい方からリヤディファレンシャルギヤDrのヨーモーメント制御量を算出し、両ヨーモーメント付加要求量の符号が異なる場合には、横滑り防止装置VSAのヨーモーメント付加要求量からリヤディファレンシャルギヤDrのヨーモーメント制御量を算出する。横滑り防止装置VSAおよびトラクションコントロール装置TCSの作動が抑制された状態でも協調制御による高い精度でヨーモーメント制御量を算出し、単独制御する場合に比べて良好な車両挙動を維持できる。
(もっと読む)
油圧制御装置
【課題】エンジンにより駆動されるオイルポンプの油圧をアキュムレータに蓄圧する油圧制御装置を提供する。
【解決手段】動力伝達装置の動力伝達状態を制御する油圧室と、エンジンにより駆動される第1オイルポンプと、電動モータにより駆動され、かつ、第1オイルポンプよりも容量が大きい第2オイルポンプと、第1オイルポンプまたは第2オイルポンプから吐出された油圧を蓄圧するアキュムレータとを有し、第1オイルポンプまたは第2オイルポンプのいずれか一方から吐出された油圧をアキュムレータに蓄圧する油圧制御装置において、油圧室のオイルの消費量が変化するかしないかを判断する判断手段(ステップS1,S2,S3)と、動力伝達装置の油圧室におけるオイルの消費量が変化しないときに、第1オイルポンプの油圧をアキュムレータに蓄圧する蓄圧手段(ステップS4,S5)とを備えている。
(もっと読む)
車両の走行安全制御装置
【課題】アクセル全開時において、適切に自動ブレーキ制御の開始を運転者に知らせるとともに、アクセル操作による自動ブレーキ制御解除を可能とすることで、より走行安全性を向上させることのできる車両の走行安全制御装置を提供すること。
【解決手段】衝突予測時間が所定時間以内という条件が成立したとき、まず警告を発し(S1)、このときアクセル全開状態であるときにはアクセル反力を発生させ(S3)、当該アクセル反力に抗してアクセルペダルが踏み込まれた場合には(S4,S6)、自動ブレーキ制御及び警告を解除する(S8)。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のカーブ路入口走行時の誤動作を抑制する。
【解決手段】レーダーで検出した車両前方の停止物ターゲットが自車線内に所定時間以上存在することを、該停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識する条件としたものにおいて、自車のヨーレート(車両の旋回方向への回転角の変化する速度)の単位時間当たりの変動量が所定閾値以上であるときは、カーブ路入口を走行していると判断し、前記所定時間を計測するためのタイマをリセットすることにより、停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識することを禁止する。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
車両用接触回避支援装置
【課題】自車と自車前方の障害物との位置関係に基づく接触余裕値を得、前記接触余裕値が閾値より小さく、かつ操向ハンドルの操作が検出されなかったとき、前記障害物に対する自車の接触回避支援を行う車両用接触回避支援装置において、バンク路の走行中に、接触回避支援処理が過剰に作動することを防止する。
【解決手段】自車10がバンクを有するカーブ路300を走行していると判断した場合には、接触回避ECUが、前方の障害物であるガードレール5との接触の可能性があると判断する接触余裕値の閾値を、より小さい値に設定するか、接触回避支援行わないようにする。
(もっと読む)
路面摩擦係数演算装置
【課題】路面摩擦係数演算装置に関し、車両の走行状態に関わらず、路面状況に対応する路面摩擦係数を算出する。
【解決手段】車両に作用する前後加速度を検出する前後加速度検出手段1と、該車両に該前後加速度が検出されない状態での定常走行継続時間を計測する計時手段2と、計時手段2で計測された該定常走行継続時間が第一所定時間以上となったときに、該車両に微少制動力又は微少駆動力を第二所定時間だけ付与する制動駆動力付与手段3と、該微少制動力又は該微少駆動力が付与された後に、該車両が走行する路面の摩擦係数を算出する路面摩擦係数算出手段4とを備える。
計時手段2は、路面摩擦係数算出手段4で該摩擦係数が算出されたときに該走行経過時間をリセットして再び該定常走行継続時間の計測を開始する。これにより、所定時間毎に周期的に路面の摩擦係数が算出される。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に違和感のない制御感を与えつつ、支援制御を適切に行うことができる車両運転支援装置及び車両運転支援方法を提供する。
【解決手段】設定時間後の自車両の将来位置を予測する。予測した自車両の将来位置が、予め設定した車線幅方向横位置である制御開始位置よりも自車走行車線の中央からみ外側にあるほど、自車走行車線の中央に向かうヨーモーメントを大きく自車両に付与して自車両を制御する。その際、自車両に付与する前記ヨーモーメントが小さいほど、自車両に大きな減速加速度を付与する。
(もっと読む)
車両制御装置
【課題】 減速制御の減速度をドライバが調整できる車両制御装置を提供する。
【解決手段】 車輪に制動力を発生させるブレーキアクチュエータ70と、自車両の前方の環境を検出するカメラ10と、ドライバによるアクセルペダル20の操作状態が加速方向でないとき、環境に応じてブレーキアクチュエータ70を作動させ、あらかじめ設定された基準減速度Accbに応じて車両を減速制御する速度制御コントローラ60と、を備え、速度制御コントローラ60は、速度制御コントローラ60による減速中にアクセルペダル20の操作状態とブレーキペダル30の操作状態とに応じて基準減速度Accbに乗算する減速度補正ゲインKaadjを補正する。
(もっと読む)
車両の挙動制御装置
【課題】車輪に前後振動を与えることによる車輪の摩擦係数の増大効果を利用して、車両の制動停止距離を好適に短縮化する。
【解決手段】車輪の接地荷重を可変とし得るアクティブサスペンション機構400を備えた車両10において、ECU100は、アンチロック制御を実行する。当該制御においては、車両10が急制動状態にある場合に、アクティブサスペンション機構400により車両10に上下方向の振動が与えられる。一方、ECU100は、スリップ率SLが基準値を超えたタイミングと、車両振動が開始されたタイミングとに基づいて、タイヤμを最大とし得るピークスリップ率SLpkを推定するピークスリップ率SLpkが推定されると、ABS閾値がこのピークスリップ率SLpkに基づいて書き換えられる。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】高μ路側に接地している車輪の低μ路側への移動を抑制し、車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】ヨーモーメント演算部18が、車両がスプリットμ路を走行しているときに、車輪に制動力が発生した場合、左右の車輪間の当該制動力の差によって車両に発生するヨーモーメントを算出する。また、制動時前後輪舵角演算部21が、ヨーモーメントが第1設定値以上である場合には、前記目標ヨーレイトを低減する。さらに、当該ヨーモーメントが第2設定値未満である場合と比較して、目標横減速度を低減する。
(もっと読む)
車両運転支援装置
【課題】道路インフラ側の整備や交信機能の普及向上を要することなく、逆光によって運転者に見え難くなった交通信号機や道路標識などの交通情報を認識可能にして、その交通情報に従った対応を行なうことで、運転者が交通情報を見落として重大な事故を引き起こすことを未然に且つ確実に防止する。
【解決手段】車両前方画像から交通情報の存在する領域が分割され、その領域の明度分散が算出され、明度分散が所定値を超える領域が候補領域として認識される。候補領域が認識されると、その候補領域における交通情報の認識が可能になる絞り値が、その候補領域の明度分散に基づいて算出され、その絞り値で車両前方画像が再撮像される。
(もっと読む)
1 - 20 / 160
[ Back to top ]