
Fターム[3D041AA75]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 安全性、フェイルセイフ (931) | 後進時の安全対策 (23)
Fターム[3D041AA75]に分類される特許
1 - 20 / 23
走行支援装置
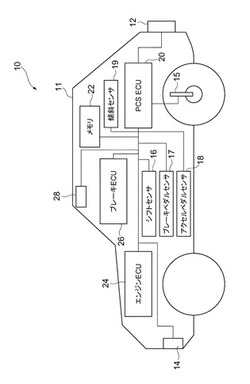
【課題】車両の後退時において、障害物と車両との距離が至近距離となった場合でも、より精緻に車両の走行を制御することが可能な走行支援装置を提供する。
【解決手段】走行支援装置10は、車両11後方の障害物Oaを検知するソナー12を有し、後退時に障害物Oaとの接触を防止するように車両11の走行を制御するPCS ECU20を備える。PCS ECU20は、障害物Oaがソナー12により検知不可能な範囲に接近したときは、ソナー12により障害物Oaを検知可能であった位置からの車両11の走行距離に基づいて推定される障害物Oaとの距離に基づいて車両11の走行を制御する。障害物Oaが接近し過ぎてソナー12により検知不可能な範囲に入ってしまい、障害物Oaをロストしてしまった状況でも、障害物Oaとの距離を推定し、推定された距離に基づいて障害物Oaとの接触を防止することができる。
(もっと読む)
走行制御装置および走行制御方法

【課題】車両を自律走行させる場合に車両の搭乗者に与える不快感を軽減できる走行制御装置および走行制御方法を提供すること。
【解決手段】車両1を自律走行させると、運転者を含む搭乗者に前触れもなく、突然切り返しが行われる場合があり、予測の困難な前後Gが車両1の搭乗者に加わることがある。本実施形態の走行制御装置100は、車両1の前進および後退を切り換える切り返し地点に車両1が到着する場合に、車両1の車両速度Vに基づいてクッションタイムを設定する。クッションタイムが設定されると、切り返し地点において車両1が所定時間停車させられるので、車両1が停車している間に、車両1の搭乗者に加わっている前後Gを緩和させることができる。よって、車両1の搭乗者に与える不快感を軽減できる。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】駐車支援の途中で駐車支援が継続できなくなることを未然に抑制することができる車両制御システムを提供すること。
【解決手段】バッテリと、バッテリからの電力により動力を出力し、出力された動力で駆動輪を回転させて車両を走行させることが可能なモータと、モータに動力を出力させて、目標駐車位置へ向けて車両を走行させる運転者の運転操作を支援する車両制御装置とを備える車両制御システムであって、車両制御装置は、支援を開始する前に、支援においてモータに要求される動力と、モータが出力可能な動力とのそれぞれの予測結果に基づいて、車両が目標駐車位置に駐車されるまでモータが要求される動力を出力可能であれば(S160−N)支援を実行し、要求される動力は、車両の周辺環境に基づいて予測され(S120)、出力可能な動力は、支援を開始する前のバッテリの蓄電量(S140)に基づいて予測される。
(もっと読む)
車両の制御装置
【課題】エンジンを搭載した車両において、低コスト化の要求を満たしながら、運転者の誤操作による事故を防止又は軽減できるようにして、安全性を向上させる。
【解決手段】車両停止後の発進時に変速機12の進行方向切換状態が車両停止直前と同一状態でアクセル開度が増大したときにエンジン11の出力トルクを制限するトルク制限制御を実行する。これにより、車両が前進(又は後進ギア)で駐車スペースに進入して停止した後、運転者が誤って変速機12を前進ギヤ(又は後進ギア)にした状態でアクセルペダルを踏み込んだ場合に、車両の急発進を防止する。更に、車両停止直前の減速中にアクセル開度が増大したときにもトルク制限制御を実行する。これにより、車両が駐車スペースに進入して停止する直前の減速中や道路が渋滞中で停止直前の減速中に運転者がブレーキペダルと間違えてアクセルペダルを踏み込んだ場合に、車両の急発進を防止する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】切り替え機構の故障時における好適なフェールセーフを実現する。
【解決手段】
内燃機関(200)と、動力伝達機構(400)と、第1電動発電機(MG1)と、駆動軸(600)との間で動力の入出力が可能に構成された第2電動発電機(MG2)と、蓄電手段(12)と、動力伝達機構に備わる一の回転要素(S2)の状態をロック状態と非ロック状態との間で選択的に切り替え可能なロック機構(500)とを備えたハイブリッド車両は、ロック機構が固定変速モードから無段変速モードへ変速モードを切り替え可能な正常状態にあるか否かを判別する判別手段(100)と、ロック機構が正常状態にないと判別され且つ変速モードとして固定変速モードが選択されるフェールセーフ要求期間において、第2電動発電機の電力回生量をロック機構が正常状態にある場合と較べて増加側へ補正する補正手段(100)とを具備する。
(もっと読む)
自動車の制御方法及び装置
【課題】
本発明の課題は、電動パーキングブレーキを備える自動MT車両において、運転者のスイッチ操作にしたがって電動パーキングブレーキを解除する場合であっても、車両の意図しない方向への移動を防止する制御方法を提案することにある。
【解決手段】
運転者のスイッチ操作にしたがって電動パーキングブレーキを解除する場合であっても、クラッチの係合を開始したのち、電動パーキングブレーキの制動状態を解除することにより、上記課題を解決する。
(もっと読む)
車両制御装置
【課題】検知された障害物の特性に合わせた適切な車両制御を行う。
【解決手段】制御部4が、障害物が移動物であるのか停止物であるのか、及び車両や壁であるのか人や軽車両であるのかに基づいて目標停止距離を変更する。すなわち制御部4は、障害物が人や軽車両である(車両や壁でない)場合には車両や壁である場合と比較して、目標停止距離Dを大きくすることにより制動力を発生させる時点での障害物からの距離を大きく(即ち制動力の発生タイミングを早く)する。これにより、検知された障害物の特性に合わせた適切な車両制御を行うことができる。
(もっと読む)
制御装置
【課題】車両が進行を妨げられる方向へ走行することを確実に防止することができる制御装置を提供すること。
【解決手段】運転者によって操作されたシフトレバー4のポジションを電気的に検知する位置検知手段5と、位置検知手段5の検知結果に基づいて、変速機3の作動状態を切り替え制御する作動制御手段2と、車両の進行方向における周辺状況を検知する状況検知手段6とを有し、該状況検知手段6が進行方向に車両の進行が妨げられる状況を検知したとき、作動制御手段2は、シフトレバー4による変速機3の切り替え制御を無効にするシフトバイワイヤ式変速機の制御装置1であって、車両の走行を制御する走行制御手段7と、走行制御手段7による車両の走行制御を規制する規制手段2とを備え、規制手段2は、状況検知手段6の検知結果に基づいて、車両の走行速度を所定速度以下に抑制するか、又は車両の走行を停止するように、走行制御手段7による車両の走行制御を規制するようにした。
(もっと読む)
車両の走行制御装置
【課題】運転者のシフトレバーの操作間違いやペダルの踏み間違いにより車両の安全走行状態が損なわれないように車両を制御すると共に、運転操作の誤りを違和感なく確実に運転者に理解させる。
【解決手段】車両の走行制御装置10は、車両の速度を検出する速度検出部2と、車両の加速度を検出する加速度検出部3と、車両の速度に応じて設定された上限加速度以内に、車両の加速度を制限する加速度制限部1と、を備える。
(もっと読む)
駐車支援装置、駐車支援方法及びコンピュータプログラム
【課題】駐車の困難な駐車スペースに対して駐車を行う場合であっても容易且つ安全に駐車を行わせることを可能とした駐車支援装置、駐車支援方法及びコンピュータプログラムを提供する。
【解決手段】障害物センサ5A,5Bにより自車周囲にある駐車スペースを検出し(S1)、検出された駐車スペースに対して所定旋回舵角で駐車を行う第1走行経路を算出し(S11〜S15)、更に車両を駐車スペースに対して進入させることが可能な範囲で第1走行経路の舵角を緩和した第2走行経路を算出し(S22〜S27)し、算出した第2走行経路に従って駐車の支援を行う(S5)ように構成する。
(もっと読む)
車両用制御装置及び制御システム
【課題】路面の状態にかかわらず、車両を停止状態から走行状態へと移行させる際に、車輪がスリップするおそれがあること。
【解決手段】登坂路において、車輪がスリップすることなく停止状態から走行状態へと移行可能な加速度の限界値(登坂限界)は、路面の勾配が大きいほど小さくなり、また、路面と車輪との摩擦係数μが小さくなるほど小さくなる。このため、車両を停止状態から走行状態へと移行させるに際し、路面の勾配が大きいほど、また摩擦係数μが小さいほど、加速度の目標値を小さく設定しつつ、加速度フィードバック制御にて車両を走行状態へと移行させる。
(もっと読む)
車両用制御装置及び制御システム
【課題】路面の状態にかかわらず、車両を停止状態から走行状態へと適切に移行させることが困難なこと。
【解決手段】路面の勾配に応じてパワートレインを操作することで、車両を停止状態から走行状態へと自動的に移行させる。この際、ユーザによってブレーキが軽く踏まれることがあっても(時刻t3)、自動的な移行にかかる制御のためのパワートレインの操作を継続する(図18(c1))。これにより、ユーザのブレーキ操作によって車両がわずかに減速されるものの、車両は走行状態を維持する。これに対し、図18(c2)に示すように、ブレーキ操作を自動的な移行にかかる制御の終了条件とする場合には、ブレーキ操作によってパワートレインのトルクが急減することから、車両を走行状態へと移行させることができなくなる。
(もっと読む)
車両の制御装置
【課題】運転者の意図に応じた微速後退を行うことが可能な車両の制御装置を提供する。
【解決手段】車両の制御装置は、アクセル開度検出手段と、傾斜角度検出手段と、速度検出手段と、要求駆動力算出手段と、走行抵抗算出手段と、制御手段と、を備える。要求駆動力算出手段は、アクセル開度から、運転者の要求駆動力を算出する。走行抵抗算出手段は、路面の傾斜角度から、走行抵抗を算出する。制御手段は、車両の速度が所定範囲以内であり、要求駆動力が、走行抵抗算出手段より得られた走行抵抗以下となる場合に、要求駆動力と走行抵抗とに基づいて、ブレーキによる制動力と電動機による駆動力とを車両に発生させる。このようにすることで、インバータの特定のスイッチング素子が熱破壊するのを防ぐことができると共に、運転者の意図に応じた微速後退をスムーズに行うことができる。
(もっと読む)
駐車支援装置
【課題】精度良く、且つ短時間で駐車の目標位置及び駐車のための経路を設定して、駐車の際の乗員の運転負荷を軽減できる駐車支援装置を提供する。
【解決手段】駐車支援装置は、後退開始位置P1まで前進し、後退開始位置P1から後進して、所定の駐車位置Eへ車両30を駐車させる運転操作を、以下のように支援する。駐車目標設定部は、車両30の周辺の情景が撮影された画像データに基づいて検出された駐車基準W1、W2に基づいて、所定の駐車位置Eに対応する駐車目標位置P4を設定する。駐車経路演算部は、前進経路KFを前進中に、車両30の現在位置から駐車目標位置P4への駐車経路KBを逐次演算する。駐車経路判定部は、駐車経路演算部の演算結果に基づいて、駐車経路KBが成立したか否かを判定する。
(もっと読む)
駐車支援方法及び駐車支援装置
【課題】車両をユーザの所望の位置に自動的に駐車させることができる駐車支援方法及び駐車支援装置を提供する。
【解決手段】車両に搭載された駐車支援システム1の制御装置2において、車両に設けられ、車外にいるユーザを撮影する前方カメラ30及び後方カメラ31から画像データG1,G2を取得する画像データ入力部19と、取得した画像データG1,G2に基づき、ユーザが指示する車両の移動量又は方向を判断し、ユーザにより指示された移動量又は方向に基づき、車両を自動制御する駐車制御処理部15とを備えた。
(もっと読む)
運転制御装置
【課題】自動駐車支援システムによる運転中の出力クリープトルクを適切に制御する運転制御装置を提供する。
【解決手段】自動駐車支援システムによる運転では、車両をクリープ走行させることで、予め設定された位置へ自動的に車両を移動させるように制御される。運転制御装置は、自動駐車支援システムによる運転中の出力クリープトルクを車両の重量に応じて決定する(ステップS2)。自動駐車支援システムによる運転中の出力クリープトルクは、自動駐車支援システムによる運転中の車速が、自動駐車支援システムを解除するか否かを決定する(ステップS4)車速の閾値を越えないように制御される。
(もっと読む)
車両駆動力制御装置
【課題】車両が、前方または後方の障害物と衝突することを確実に回避する。
【解決手段】車両の前部に備えた前方センサの検出結果により、前方に障害物があると、判定されたとき、または、車両の後部に備えた前方センサの検出結果により、後方に障害物があると判定された場合は、急激なアクセルペダルの踏み込みが行われたかを判定し、急激なアクセルペダルの踏み込みがあったと判定されたときは、車両の駆動力制限制御を実行し、表示装置にその旨を表示する。
(もっと読む)
走行車輌
【課題】 本発明の課題は、ブレーキペダルの踏込み操作により、前後進とも変速レバーを高速側から低速中立側へ復帰できるようにし、簡潔な構成でもって前後進共に減速精度並びに安全性の向上を図ることにある。
【解決手段】 本発明は、前後方向の操作で前後進の変速が可能な変速レバー(31)と踏込回動操作でブレーキ装置を作動させるブレーキペダル(21)を備え、ブレーキペダル(21)と一体回動する作動部分が変速レバー(31)と一体回動する被作動部分に接当して変速レバーを低速側へ復帰させるべく連動構成し、作動部分及び被作動部分は前進側用(24f),(33f)と後進側用(24b),(33b)とを備えた構成とする。
(もっと読む)
車両および駆動装置並びに車両の制御方法
【課題】エンジンからの前進走行用の動力とモータから変速機を介して出力される動力とを用いて走行する車両において、変速機をダウンシフトしている最中にシフトポジションがドライブポジションからリバースポジションに変更されたときに、より確実に後進走行する。
【解決手段】ダウンシフトが行なわれている最中にシフトポジションがリバースポジションに変更されたときには(S170,S180)、ダウンシフトが完了するまでエンジンを自立運転すると共に要求トルクTr*に基づくトルク指令Tm2*でモータを制御する(S190,S240)。これにより、ダウンシフトの最中にリバースポジションに変更されたときに、エンジンから車軸に出力される前進走行用のトルクがモータから変速機を介して車軸に出力される後進走行用のトルクよりも大きくなるのを抑制することができ、より確実に後進走行することができる。
(もっと読む)
運転装置の制御装置
【課題】運転者の能力等に合わせて操作装置の操作性を調整でき、車両の運転を容易化することが可能な運転装置の制御装置を提供する。
【解決手段】操作レバー20を含み操作レバー20の操作位置を出力する操作装置10と、車両のブレーキ及びアクセルを動作させる駆動系60,70とを備える運転装置において、操作位置に応じて駆動系60,70の制御量を決定し制御する制御装置50であって、操作位置と駆動系60,70の制御量との関係を変更可能に形成されている。この構成によれば、ユーザの能力、好みや車両の状況に合わせて操作装置10の操作性を調整できる。
(もっと読む)
1 - 20 / 23
[ Back to top ]