
Fターム[3D041AD46]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 車両外部状況 (949)
Fターム[3D041AD46]の下位に属するFターム
Fターム[3D041AD46]に分類される特許
341 - 356 / 356
車両の障害物接触時挙動制御装置

【課題】 障害物への接触回避不可能であり、かつ、助手席の乗員が不在であると判定された場合、運転者の安全性をより高レベルで確保することができる車両の障害物接触時挙動制御装置を提供すること。
【解決手段】 自車と障害物との相対関係により自車が障害物への接触回避可能であるか否かを判定する接触回避判定手段と、自車が障害物への接触回避不可能であると判定された場合、自車の障害物に対する接触時挙動を制御する接触時挙動制御手段と、を備えた車両において、自車の助手席に乗員が存在しているか否かを判定する助手席乗員判定手段を設け、前記接触時挙動制御手段は、自車が障害物への接触回避不可能であり、かつ、助手席の乗員が不在であると判定された場合、助手席側から障害物に接触するように車両にヨーモーメントを発生させる手段とした。
(もっと読む)
車両用走行制御装置

【課題】 交差点手前で、自車両が、自車両と同一方向に走行する他車線の車両の陰となって、対向車線の右折車両から認識されるタイミングが遅れることを回避する。
【解決手段】 自車両と同一方向の右側車線に隣接車両が存在し且つ自車両が交差点手前の制御対象領域に位置するとき、隣接車両が基準ラインに達するまでの到達所要時間を算出し、この到達所要時間の間に自車両が基準ラインに到達するために必要な目標加速度Agを算出する(ステップS2〜S5)。この目標加速度Ag及び基準ラインに到達したときの予測される到達車体速度Vhが共にそのしきい値よりも小さく、且つ自車両が目標加速度Agで加速可能な状態にあるとき、目標加速度Ag相当の加速を行う(ステップS6〜ステップS9)。自車両と隣接車両とはほぼ同時に基準ラインに達することになりほぼ並走するから、対向車線の右折車両から見て自車両が隣接車両の陰となることが回避される。
(もっと読む)
運転支援装置
【課題】道路情報に基づいて、新しい道路環境に適応するように自車両を走行させ、安全性を向上させること。
【解決手段】車輪の回転速度に対応した信号を検出する車速センサ10、ナビゲーション装置20、及びスロットルバルブの開度を調節するスロットル駆動器40が設けられている。事前登録地点(例えば、制限速度が変更される地点)に自車両が接近した場合、事前登録地点を起点とする道路の制限速度を取得し、自動的に、スロットル駆動器40を用いて、自車両の駆動力を制御することによって、自車両の車速を制限速度まで変更させるようにした。
(もっと読む)
雨量検知式制御装置
【課題】雨量に応じて車間距離制御や車間距離警報などの制御を実行する場合に、トンネル等により一時的に雨が遮断されることがあってもドライバに違和感を与えることのない制御を行うことができる雨量検知式制御装置を提供すること。
【解決手段】雨量に応じて車両の制御を行う装置において、雨量が所定雨量を超えているか否かを判断する雨量判断手段と、雨量が所定雨量を超えているときには雨量に応じた車両の制御を解除する制御解除手段と、トンネル等により雨が遮断される距離を取得する雨滴遮断距離取得手段と、この距離が所定距離より短いときには、雨量が所定雨量を超えていなくても、解除した車両の制御が復帰するのを禁止する制御復帰禁止手段とを備えている。
(もっと読む)
衝撃制限を有する適応的な間隔及び速度制御装置
車両の前方に存在する目標対象の間隔と相対速度を測定するためのセンサ装置(4)と,目標対象に対する所定の間隔に制御するための間隔制御機能を有し,かつ時間的に可変の操作量(am,ab)を車両の駆動システム及び/又はブレーキシステムの操作部材(30,32)へ出力する,制御装置(10)と,操作量及び/又はその時間的変化を制限するための衝撃制限装置(26)と,を有する,車両の適応的な間隔及び速度制御装置は,センサ装置(14)によって検出された交通状況の突然の変化を認識して,状況に従って,間隔及び速度制御が続行されている場合に,衝撃制限装置(26)の機能を制限する,ダイナミック装置(34)を特徴としている。  (もっと読む)
(もっと読む)
制駆動力制御装置
【課題】 対象物体との衝突を回避するための制動の立ち上がり、および回避後の駆動の立ち上がりを早くする制駆動力制御装置を提供することを課題とする。
【解決手段】 対象物体との離間距離が縮まっている時であって、離間距離が所定の第1の距離(I)以下且つ所定の第2の距離(II)以上であるときに、第一予備制動力およびこの第一予備制動力を打ち消す第一予備駆動力を、前後輪又は前輪と後輪のいずれかに及ぼす制御をする危険回避準備制御手段を備えることを特徴とする。一方、離間距離が拡がっている時であって、離間距離が所定の第3の距離(III)以上且つ所定の第4の距離(IV)以下であるときに、第二予備駆動力および第二予備駆動力を打ち消す第二予備制動力を、前後輪又は前輪と後輪のいずれかに及ぼす制御をする危険回避終了制御手段を備えることを特徴とする。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
自車両のリスクポテンシャルの変化を運転者にわかりやすく伝える車両用運転操作補助装置を提供する。
【解決手段】
先行車に対する自車両のリスクポテンシャルを算出し、複数の領域から、算出したリスクポテンシャルの領域を判定する。そして、リスクポテンシャルの領域に対応して設定した制御反発力にしたがって、自車両に発生する制駆動力を制御する。リスクポテンシャルが大きな領域ほど制御反発力を大きくする。リスクポテンシャルが領域間を遷移するときは、制御反発力を徐々に変化させ、リスクポテンシャルの大きな領域へ遷移するほど遷移状態における制御反発力の変化量を大きくする。
(もっと読む)
車両の減速制御装置
【課題】前方車両との位置関係を適正にするために変速機と制動装置を協調して制御することで減速度を発生させる場合に、前方車両のロスト時に生じる違和感を抑制することが可能な車両の減速制御装置を提供する。
【解決手段】車両X1と前記車両の前方の前方車両X2との位置関係を適正にするために変速機10と制動装置200を協調して制御することで減速度を発生させる車両の減速制御装置であって、前記前方車両を見失う可能性が有ると判定されたときには、前記変速機により発生させる減速度の割合を増やす。前記前方車両を見失う可能性の有無は、前記車両と前記前方車両との距離Lb’と、前記車両の前方のカーブの曲率又は半径Rに基づいて、判定されることができる。また、前記前方車両を見失う可能性の有無は、道路勾配に基づいて、判定されることができる。
(もっと読む)
車両の減速方法および減速装置
車両の減速方法および減速装置が提案される。本方法は、対象物センサシステムを用いて車両の周囲にある対象物を検出し、識別された対象物のいずれかとの回避不能な衝突を認識した場合には、衝突を防止しまたは衝突の強度を緩和するために非常ブレーキを作動させる。このために、非常ブレーキの開始時に、ドライブトレインが著しい減速作用を伴うシフト位置に、トランスミッションが切替えられる。このために、本装置は、対象物センサシステムを備え、対象物センサシステムを用いて車両の周囲にある対象物を検出可能であり、識別された対象物のいずれかとの回避不能な衝突を認識した場合には、衝突を防止しまたは衝突の強度を緩和するために非常ブレーキを作動可能である。 (もっと読む)
車両用支援システム
本発明は、車両用支援システム、特にエレクトロニックラリーコパイロットシステム、追い越し支援システムまたは右折優先通行支援システムに関する。本発明によれば、支援システムは少なくとも1つの制御ユニットを有し、この制御ユニットが認識したドライバー設定に基づいていわゆるグローバルデータ、ローカルデータおよび内部データの3つのグループから少なくとも1つのデータを選択し、これに依存して車両の走行ダイナミクスに関する出力信号が形成されるようにこれらを相互に結合する。本発明はさらに、3つ(ドライバー設定を入れれば4つ)のグループによって形成されたデータを有利には同時に処理する支援システムに関する。これにより、特に有利には、安全性に関するアプリケーションにとって特に重要なリダンダンシーが達成される。したがって本発明はこんにちの車両のラリーコパイロットシステム、追い越し支援システムおよび/または右折優先通行支援システムに適している。 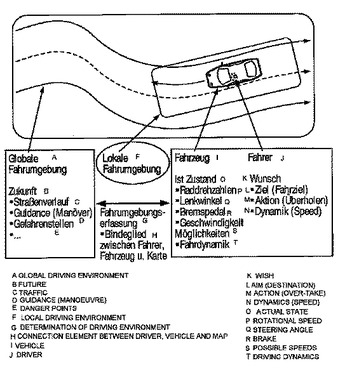 (もっと読む)
(もっと読む)
連結車両の制御システム
本発明は、牽引車両及びトレーラーから構成される連結車両の制御システム(7)に関する。このトレーラーは、台枠を積み込み輸送しかつ積み降ろすようになっており、この台枠は支持具の上に載せることができ、この台枠の上にペイロードが搭載される。この制御システムにおいて、径路を計算する径路コンピュータ(8)が設けられ、この径路コンピュータは、台枠(4)を積み込むためにトレーラーを後ろ向きに台枠の下に導く径路を計算する。
第1の入力装置(10)が設けられ、それによって、台枠の実際の位置及び実際の方位が径路コンピュータ(8)に入力されることが可能であれば、そしてまた、第2の入力装置(11)が設けられ、それによって、トレーラーの実際の位置及び実際の方位が径路コンピュータ(8)に入力されことが可能であれば、特に信頼性の高いシステムが得られる。この場合、径路コンピュータ(8)は、台枠の実際の位置及び実際の方位から、トレーラーに対する参照位置及び参照方位、すなわちトレーラーが台枠を積み込むために台枠の下に位置する位置及び方位を計算するように構成され、かつ、径路コンピュータ(8)は、トレーラーの位置及び方位の実際値と参照値とから、トレーラーを後ろ向きに台枠の下に導く径路を計算するように構成される。
(もっと読む)
自動車のための距離制御付き速度制限方法及び速度制限装置
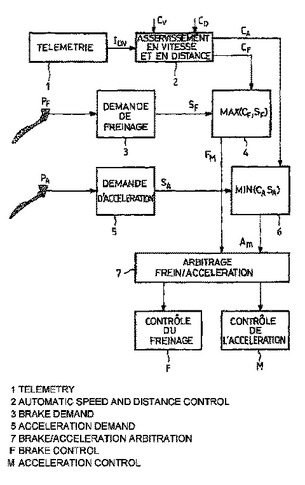
本発明は、測距手段と、距離と速度を制御するためのエンジン動作制御手段とが装備された自動車のための距離制御付き速度制限方法及び速度制限装置に関する。本発明の方法は、速度制限方法の起動後に、設定速度を選定し、同じ走行車線に、より低速な自動車が存在しない場合には、自動車の速度が設定速度以下である限りは、アクセルペダルに対する運転者の操作によって、また、設定速度に達するか超過するときには、速度制限方法の非活性化の可能性付きの、自動制御によってエンジントルクを制限することからなる。装備された自動車の前方に、より低速な目標自動車の存在する場合には、本方法は、速度の自動減速と、運転者によって調整可能な、2つの上記自動車の間の一定追随時間の維持と、速度制限方法の非活性化を伴わないで、運転者に本方法によって決定された速度の減速を許容することからなる。
 (もっと読む)
(もっと読む)
車両の長手方向の移動を制御する方法
本発明は、特に長手方向移動制御システムを用いて、車両(3)の長手方向の移動を制御する方法に関する。閾値速度を超える車速については、前方走行車両(8)が検出されない場合は、車速はより高い選択された設定速度に調整され、前方走行車両(8)が検出された場合は、この前方走行車両(8)からの距離が調整される。車両が閾値速度未満の速度で走行している場合は、前方走行車両(8)が検出された場合にのみ、車両(3)の長手方向の移動が制御される。この結果、車間距離制御システムが、比較的大きい速度範囲に渡って実施され得る。 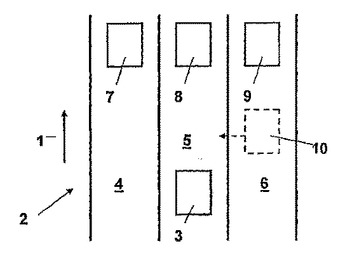 (もっと読む)
(もっと読む)
事故による損傷を低減する方法及び装置
この発明は、車両の運転者が、事故を起こした車両を安全な場所に移動させることができない場合に、事故による損傷を低減するための方法及び装置に関する。その場合に、この発明では、システムが、好適な手法で車両の動き挙動に介入して、運転者の助け無しに(自律的に)、車両を安全な場所に移動させる形で、車両を制御するものである。 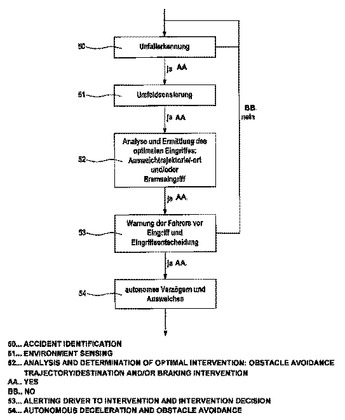 (もっと読む)
(もっと読む)
間隔警告システムを有する自動車内の疲労警告装置
運転者の疲労状態を検出するための運転者センサ技術(20)と間隔警告システムとを有しており,その間隔警告システムは環境センサ技術を有し,かつ,前を走行する車両に対する警告間隔を下回った場合に警告信号を出力し,および/または車両の駆動システムおよび/またはブレーキシステム(14,16)へ制御介入を行うように形成されている,自動車内の疲労警告装置は,間隔警告システムが調節装置(22)を有しており,その調節装置は,検出された疲労状態(E)に従って警告間隔を変化させるように形成されていることを特徴としている。 (もっと読む)
車間距離制御装置
【課題】 車間時間または車間距離をステップ状に切り換えた時の車速変化を緩やかにする。
【解決手段】 車間時間がステップ状に切り換えられた時に、車間時間を所定の変化速度で変化させて目標車間時間T*を生成し、目標車間時間T*と車速検出値とに応じた目標車間距離を設定し、車間距離検出値が目標車間距離に一致するように車両の駆動力と制動力を制御する。これにより、車間時間をステップ状に切り換えた時の車速変化が緩やかになり、乗り心地をよくすることができる。
(もっと読む)
341 - 356 / 356
[ Back to top ]