
Fターム[3D041AD48]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 車両外部状況 (949) | 自然条件 (45)
Fターム[3D041AD48]に分類される特許
1 - 20 / 45
車両の制御装置
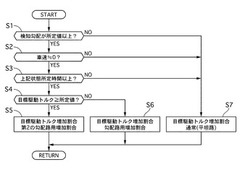
【課題】勾配路における発進時の応答性を向上可能な車両の制御装置を提供する。
【解決手段】車両停止状態からの発進時、所定増加割合により動力源の駆動トルクを増加させるにあたり、検知された路面勾配が所定以上、かつ、車速が略0の状態が所定時間以上継続し目標駆動トルクが勾配負荷トルク相当値以上のときは、目標駆動トルクの増加割合を平坦路における所定増加割合よりも大きな勾配路用増加割合に変更する。尚、この勾配路用増加割合は、運転者のアクセルペダル開度が大きい程、大きな増加割合となるように設定する。
(もっと読む)
車両運動制御装置

【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】アベイラビリティ演算部5にて、アプリ情報に含まれるアプリケーションの要求に応じたアベイラビリティ変更や車両情報に応じたアベイラビリティ変更が行われるようにする。これにより、アプリケーションの要求や車両情報を反映して各制御対象のアベイラビリティを変更することが可能となり、より適切な制御対象を選択してアプリケーションの要求や車両情報に忠実な車両横方向運動制御を実行することが可能となる。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映させて走行特性および人間の間隔に刺激を与える演出装置を制御する。
【解決手段】車両の走行状態に基づく指標を求め(ステップS2)、該指標に応じて前記車両の走行特性を変化させる車両の制御装置において、前記指標は、前記車両の挙動が機敏になるように前記走行特性を変化させる方向には前記走行状態の変化に応じて迅速に変化し、かつ前記車両の挙動の機敏さが低下するように前記走行特性を変化させる方向には前記走行状態の変化に対して遅れて変化する指標を含み、前記車両の運転者の五感の少なくとも一部に刺激を与える演出装置の出力内容を前記指標に基づいて変化させる(ステップS8,S9)ように構成されている。
(もっと読む)
車両制御装置
【課題】追従走行時における車間制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御を行う車両制御装置2であって、追従走行制御時には、先行車100の加減速制御の開始時点から、先行車100の加減速制御の開始を走行情報に基づいて自車1が検出するまでの検出遅れ時間と、自車1が加減速制御信号を送信した時点から自車1が加減速制御を開始するまでの制御応答遅れ時間と、の和以上で先行車100と自車1との車間時間を設定し、且つ、自車1の走行時の環境または走行状況の少なくともいずれか一方に応じて検出遅れ時間または制御応答遅れ時間の少なくともいずれか一方を変更する。
(もっと読む)
運転支援制御装置
【課題】運転支援制御装置により、走行条件に応じた運転者の嗜好や技量に適応した円滑な車両走行を実現する。
【解決手段】運転支援制御装置において、ユーザ入力により、予め運転支援制御設定が入力される。車速設定入力画面においては、リンク400における設定車速として、たとえば「40km/h」が設定される。条件設定入力画面においては、このリンク400に対する車速設定および条件設定の組合せの有効期間、該組合せの適用対象の時間帯、および該組合せが適用される天候条件および路面状態の条件が各々設定される。運転支援制御設定に従って、車両走行時に車両制御処理が行われる。運転支援制御装置は、設定した条件に基づき設定車速の超過を検出したとき、運転者に減速を促す警告を報知すると共に、ECUに速度超過を通知してスロットル開度の低減等が行われるようにする。
(もっと読む)
車両の駆動状態制御装置
【課題】オンデマンド式装置において、4輪駆動状態から2輪駆動状態への切り換えの際、クラッチ駆動電流が無駄に消費されること、並びに、車輪に大きなスリップが発生することを抑制すること。
【解決手段】2輪駆動状態において駆動輪(後輪)に加速スリップが発生したとき、駆動システムが2輪駆動状態から4輪駆動状態へと切り換えられる。即ち、多板クラッチ機構の伝達可能最大トルクTが「0」から所定値T1に増加する。4輪駆動状態では、車輪の何れにも加速スリップが発生しない状態で車両が所定距離Daだけ走行する毎に、伝達可能最大トルクTが現在値から所定値Aだけステップ的に減少していく。即ち、多板クラッチ機構C/Tに供給されるクラッチ駆動電流Iが徐々に(ステップ的に複数回)減少していくとともに、前輪(後輪)への駆動トルク配分が徐々に減少(増加)していく。
(もっと読む)
運転者支援システムのための実世界の交通場面からの視覚特性の行動ベース学習
【課題】運転者支援システムをセットアップおよび運用するための、コンピュータに実装される方法を提供する。
【解決手段】車両の環境を視覚感知するステップと、車両のマン・マシン・インタフェースを操作している運転者の影響を受ける可能性がある、車両の状態を表すパラメータの少なくとも1つの変化率を感知するステップと、感知された変化率の特定のカテゴリに関連付けられ、したがって、運転者の特定行動に関連付けられた視覚的特徴を見つけるために、視覚感知によって収集された情報を、少なくとも1つの感知された変化率をその様々なカテゴリに分類することによって構造化するステップと、を含む。
(もっと読む)
路面摩擦係数演算装置
【課題】路面摩擦係数演算装置に関し、車両の走行状態に関わらず、路面状況に対応する路面摩擦係数を算出する。
【解決手段】車両に作用する前後加速度を検出する前後加速度検出手段1と、該車両に該前後加速度が検出されない状態での定常走行継続時間を計測する計時手段2と、計時手段2で計測された該定常走行継続時間が第一所定時間以上となったときに、該車両に微少制動力又は微少駆動力を第二所定時間だけ付与する制動駆動力付与手段3と、該微少制動力又は該微少駆動力が付与された後に、該車両が走行する路面の摩擦係数を算出する路面摩擦係数算出手段4とを備える。
計時手段2は、路面摩擦係数算出手段4で該摩擦係数が算出されたときに該走行経過時間をリセットして再び該定常走行継続時間の計測を開始する。これにより、所定時間毎に周期的に路面の摩擦係数が算出される。
(もっと読む)
車両用運転支援装置
【課題】自動的に急な横移動回避が行われることによるオートメーションサプライズを抑えることができる車両用運転支援装置を提供する。
【解決手段】自車100の運動状態を検出する自車状態検出手段と、前方の障害物を検出する前方障害物検出手段としてのカメラ1と、ミリ波レーダ2と、前方障害物と接触しない自車100の第1制駆動力範囲を演算する第1制駆動力演算手段13と、後方障害物と接触しない自車100の第2制駆動力範囲を演算する第2制駆動力演算手段12と、第1及び第2制駆動力範囲を満たす自車制駆動力が存在する場合は、自車100はその制駆動力を実現して前方障害物、後方障害物との接触を回避し、存在しない場合は操舵も使用して前方障害物、後方障害物、側方障害物との接触を回避する車両操作量決定手段14と、を備える。
(もっと読む)
車両の制御装置
【課題】エンジントルクに影響を与える機器の異常に応じて制御を行なうとともに、エンジン以外の制御システムを共通化する。
【解決手段】エンジンコントロールシステム700は、エンジントルクの実現もしくは推定に影響を与える複数の機器の異常を示す情報を集約する。さらにエンジンコントロールシステム700は、複数の機器のうちの少なくともいずれか一つの機器の異常が検出された場合には、エンジントルクの実現精度もしくは推定精度が低下することを示す情報を出力する。トランスミッションコントロールシステム800は、エンジントルクの実現精度もしくは推定精度が低下することを示す情報に応じて、オートマチックトランスミッションを制御する。クルーズコントロールシステム900は、エンジントルクの実現精度もしくは推定精度が低下することを示す情報に応じてクルーズコントロールを実行する。
(もっと読む)
ビークルを運転する方法及び関連システム
【課題】電気駆動装置を持つビークルを運転する方法を提供する。
【解決手段】本方法は、第1の区域及び第2の区域を規定する段階を含む。第1の区域は関連した第1の特性を持ち、また第2の区域は第1の特性とは異なる関連した第2の特性を持つ。本方法は更に、ビークルが第1の区域から第2の区域へ移動することに応答してビークルの運転モードを第1の区域内での第1の運転モードから第2の区域内での第2の運転モードへ切り換える段階を含む。本発明では、関連したビークル及びシステムも提供する。
(もっと読む)
車線逸脱防止制御装置
【課題】車両の走行状況に応じて適切な支援レベルの操舵力を得られる車線逸脱防止制御装置を提供する。
【解決手段】車線逸脱防止制御装置を、走行状況検出手段140と、車線認識手段110と、目標横位置設定手段120と、自車両の横位置を認識する自車横位置認識手段130と、操舵機構の実ステア角を検出する実ステア角検出手段23と、自車両が目標横位置に近づく目標ステア角を算出する目標ステア角算出手段151と、第1の操舵力をステア角のフィードバック制御により設定する第1の操舵力設定手段152と、第2の操舵力を目標ステア角と車両状態量に基づいた操舵力のフィードフォワード制御により設定する第2の操舵力設定手段153と、走行状況に応じて第1の操舵力と第2の操舵力との比率を変化させて目標操舵力を設定する目標操舵力設定手段150と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段160とを備える構成とする。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】自車両の前方の道路区間において運転支援制御を実施するか否かを、ユーザが選択することができなかった。
【解決手段】自車両の周辺の道路の特徴を示す特徴情報を取得し、運転支援制御を実施する候補とする道路の特徴を示す候補特徴情報を取得し、前記候補特徴情報に示される特徴と合致する特徴が前記特徴情報に含まれる場合、前記運転支援制御の実施可否を、ユーザに選択させるための案内を行い、前記ユーザの選択を示す情報を取得し、前記ユーザが前記運転支援制御の実施を許可すると選択した場合、前記運転支援制御を行う。
(もっと読む)
車両の制御装置
【課題】 触媒暖機制御を解除或いは制限することと、エアコンの作動を停止することによってブースタ負圧を確保するにあたって、ブースタ負圧を好適に確保できるとともに、エアコンの性能が損なわれることを防止すること。
【解決手段】 インテークマニホールド14から負圧を取り出すブレーキブースタ22と、内燃機関50の動力を動力源とするエアコンとを備える車両で、触媒暖機制御を解除或いは制限するための制御である負圧保持制御を行うとともに、エアコンの作動を停止するための制御である負圧回復制御を行う車両の制御装置であって、負圧保持制御を触媒暖機制御の実行時にブレーキ操作に備えて予め行う負圧保持制御手段と、負圧回復制御を負圧保持制御に付随して行う負圧回復制御手段と、負圧回復制御の実行後、負圧保持制御または負圧回復制御の実行条件が成立した場合であっても、所定期間の間、制御の実行を禁止する禁止制御手段とを備える。
(もっと読む)
加減速予測装置、電子制御ユニット、加減速予測方法
【課題】車両が実際に加速又は減速する前に加速又は減速を予測する加減速予測装置、電子制御ユニット及び加減速予測方法を提供すること。
【解決手段】運転者の操作による加速又は減速を予測する加減速予測装置100であって、走行状況を検出する検出手段11〜15と、運転者の操作による加減速よりも所定時間手前に、検出手段11〜15が検出した走行状況の過去データを加減速情報に対応づけて蓄積するデータ蓄積手段31、32と、検出手段11〜15が検出した走行状況の現在データに類似した過去データがデータ蓄積手段に蓄積されている場合、該過去データに対応づけられた加減速情報と同じ態様で加減速すると予測する予測手段34と、
を有することを特徴とする。
(もっと読む)
車両制御装置およびそれを用いた車両制御システム
【課題】制御対象に対する機能ドメイン制御手段による挙動制御を車両環境に応じて適宜調整し、機能ドメイン制御手段の構成の変更に適応する作業量を低減する車両制御装置およびそれを用いた車両制御システムを提供する。
【解決手段】車両制御装置は、車両が置かれた車両環境に基づいて車両モードを設定し、車両モード毎に、分配する資源と、資源を分配する機能ドメイン制御手段とを決定する(S300)。車両環境は、走行速度、運転者により設定される運転モードである省エネモードおよびスポーツモード等の車両自体に基づいた車両の走行状態と、車両の周囲の天候、走行道路の種別、走行地域、駐車中、車両移送中、盗難等の車両の周辺状況とを表す。車両制御装置は、S300で設定した車両モードを判定し(S302)、車両モードに応じて適切な量の資源を機能ドメイン制御手段に分配する(S304、S306、S308)。
(もっと読む)
安全運転支援方法、車載端末装置、及び運転支援プログラム
【課題】
ドライバの運転操作性を損なうことなくドライバが危険な運転を行おうとした場合には安全運転支援を行う。
【解決手段】
予防安全装置120、130が作動した時、或いは予防安全装置120、130を作動させる車輪速センサ121、ヨーレートセンサ122、ブレーキ圧センサ123のセンサ値が予め設定した閾値を越えた場合に、坂道、非舗装道路、カーブ、駐車場、交差点などの走行場所と、絶対時間、降雪情報、降雨情報、外気温などの走行環境と、車両速度などの車両状態とを車両端末110内の記憶部に記憶しておき、車両が記憶された走行場所を記憶された走行環境下と車両状態で走行しようとした場合に、車載端末110はドライバへの警告通知または車両減速制御によって安全運転支援を行う。
(もっと読む)
車両制御装置及び車両制御方法
【課題】車両に内外に関する情報に対し適切な制駆動制御を行うこと。
【解決手段】本発明は、車両内外に関する情報に基づき、車両内外に関する情報とは別の車両外に関する情報を取得する複数の取得手段20のうち1つの取得手段を選択する選択手段14と、取得手段20が取得した車両外に関する情報に基づき、車両を制動または駆動する制駆動手段30を制御する制駆動制御手段16と、を具備する車両制御装置及び車両制御方法である。
(もっと読む)
駆動力制御装置
【課題】運転指向に基づいて車両の駆動力を制御する駆動力制御装置において、車両の走行に要する注意度と乖離した駆動力制御が行われることを抑制することが可能な駆動力制御装置を提供する。
【解決手段】人工知能システムを用いて運転指向を推定し、前記推定された運転指向に基づいて車両の駆動力を補正する駆動力制御装置であって、前記車両の走行に要する注意度を推定する手段(S002)と、前記車両の走行に要する注意度に基づいて、前記駆動力の補正の応答性を変更する手段(S007〜S010)とを備えたことを特徴としている。
(もっと読む)
周辺監視装置及び周辺監視方法
【課題】後続車両の影響を考慮し、歩行者との接触事故を確実に回避すること。
【解決手段】歩行者認識部11によって自車両前方の歩行者を認識し、危険度判定部21が自車両の走行速度と歩行者の位置に基づいて危険度を算出する。さらに、後続車両検知部15によって自車両に追突する可能性のある後続車両を検知し、後続車両が存在する場合には後続車両の自車両に対する相対速度と距離に基づいて危険度補正部22が危険度を補正する。得られた危険度から、運転者通知部23、歩行者通知部24、後続車両通知部25、動作介入部26による歩行者保護制御を実行する。
(もっと読む)
1 - 20 / 45
[ Back to top ]