
Fターム[3D041AD46]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 車両外部状況 (949)
Fターム[3D041AD46]の下位に属するFターム
Fターム[3D041AD46]に分類される特許
141 - 160 / 356
車両用運転操作補助装置
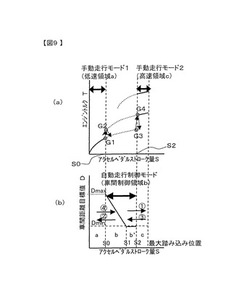
【課題】車両制御モードの切換を運転者が容易に覚知することができる車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、車両制御モードが切り換わる際に切り換わりの重要度に応じて車両特性を一時的に変更し、運転者に車両制御モードの切り換わりを知らせる。自動制御モードから手動制御モードの高速領域に切り換えられる場合は、その他の切り換わりよりも車両特性の変更を強調して行う。
(もっと読む)
車両特に商用車両の衝突を回避するか又は衝突による衝突の重大さを減少する装置及び方法

本発明は、車両特に商用車両の衝突を回避するか又は衝突による衝突の重大さを減少する装置であって、交通状況に関係する基準を入力しかつ交通状況に関係する閾値を求める入力装置、車両の周辺にある物体を検出する検出装置、自己の車両の運動状態を測定する測定装置、入力装置、検出装置及び測定装置から得られる情報を処理し、かつ車両の運動状態に関係する構成要素を制御する制御信号を発生する制御装置、及び発生される制御信号を出力する出力装置を含んでいる。本発明は更に対応する方法及びコンピュータプログラムに関する。 (もっと読む)
車両監査装置およびそれを用いた車両制御システム
【課題】制御対象に対する機能ドメイン制御手段による挙動制御の正当性を正しく判定し、機能ドメイン制御手段の冗長系の複雑化を防止する車両監査装置およびそれを用いた車両制御システムを提供する。
【解決手段】イントラボックス100は、タイヤ70の挙動を制御するステアリング制御装置30およびブレーキ制御装置40とは独立して設置されている。イントラボックス100の挙動情報取得手段210は、各種センサの検出信号等から車両の実際の挙動情報を取得する。監査手段240は、車両の実挙動情報に基づいて、ステアリング制御装置30およびブレーキ制御装置40のタイヤ70に対する挙動制御の正当性を判定する。ステアリング制御装置30およびブレーキ制御装置40による挙動制御が異常の場合、監査手段240は、車両の挙動異常を解消するように、ステアリング制御装置30およびブレーキ制御装置40に対して挙動制御の指令値を出す。
(もっと読む)
オートクルーズ装置
【課題】 先行車との車間距離を保持しながら走行可能なオートクルーズ装置に関し、常に適切なタイミングで補助ブレーキを作動させることを目的とする。
【解決手段】 先行車に対する目標車間距離doを算出する目標車間距離算出手段26と、先行車との実際の車間距離dを求める実車間距離検出手段18と、目標車間距離doと実車間距離dとの偏差Δdを求める車間距離偏差算出手段28と、目標車間距離doと該車間距離偏差Δdとの比としての車間距離偏差率drを求める車間距離偏差率算出手段30と、少なくとも該車間距離偏差率drに基づいて該車両の制動装置を制御する制動装置制御手段22とを有するように構成する。
(もっと読む)
車両用運転制御装置
【課題】 運転者の意図する操作を妨げることなく、かつ高価な装置を用いずに車両の急発進や暴走を防止する車両用運転制御装置を提供する。
【解決手段】 本発明の車両用運転制御装置1は、車両の位置情報を取得する位置情報取得手段2と、地図データを格納するデータ記憶手段3と、位置情報及び地図データ3を用い、車両のマッチング位置をマップマッチングするマップマッチング手段4と、車両の急発進を防止する急発進防止手段5と、車両のマッチング位置が地図データ3における道路上にあるか否かを判定し、道路上にないと判定された場合に急発進防止手段5を実行する状況判定手段6と、を有することを特徴とする。
(もっと読む)
追尾システム及びその方法並びに車両
【課題】GPSが利用できない環境下であっても安定した追尾走行を実現すること。
【解決手段】先導車両1は、車輪の回転数と操舵角とをパラメータとし、所定の演算式に基づいてある原点からの位置と姿勢とを推定し、推定した位置及び姿勢と自己の周辺の環境情報とに基づいて環境マップを作成し、環境マップを後続車両に送信し、後続車両2は、車輪の回転数と操舵角とをパラメータとして所定の演算式に基づいてある原点からの位置と姿勢とを推定するとともに、周辺の環境情報と先導車両からの環境マップとを照合することにより自己の位置と姿勢とを推定し、車輪の回転数と操舵角とに基づいて推定した自己の位置と姿勢及び環境マップに基づいて推定した自己の位置及び姿勢とに基づいて、最終的な自己の位置及び姿勢を決定する。
(もっと読む)
車両用制御装置
【課題】車両環境に応じて特定の走行制御システムの操作を抑制することが可能な車両用制御装置の提供。
【解決手段】本発明に係る車両用制御装置は、操作回数、操作時間又は操作角度に応じて車両に搭載される複数のシステムのそれぞれを選択可能な操作スイッチであって、選択したシステムの制御状態を変更させるために操作される操作スイッチと、所定の車両環境を検出又は予測するように構成された車両環境検出手段とを備え、前記複数のシステムのうちの少なくとも1つは、車両の走行状態又は車両のヘッドライトの光軸を制御する走行制御システムからなり、前記車両環境検出手段により所定の車両環境が検出又は予測された場合に、前記走行制御システムの制御状態を変更するための前記操作スイッチの操作を抑制する操作抑制手段を更に備えることを特徴とする。
(もっと読む)
車両制御装置、車両制御方法及びコンピュータプログラム
【課題】制動制御の開始タイミングを早くすることによって障害物との接触の際の衝撃を小さくすることを可能とした車両制御装置、車両制御方法及びコンピュータプログラムを提供する。
【解決手段】自車両と前方車両とが衝突する虞があると判定された状況下で衝突防止制御を行う際に、自車情報、前方車両情報及び周辺道路状況を考慮することにより、ステアリング操作によって前方車両との衝突が回避できるか否かを判定し(S21〜S25)、回避できると判定された場合にはAT5をシフトホールド制御するとともに、回避できないと判定された場合にはAT5をシフトダウン制御するように構成する。
(もっと読む)
車両の走行制御装置
【課題】追従走行制御中に、先行車を見失った場合であっても、運転者に不快感及び違和感を与えることなく、運転者のフィーリングに合った報知を行うことができるようにする。
【解決手段】先行車を捕捉する前方認識装置3と、前方認識装置3で先行車を捕捉した場合に、この先行車に対する追従走行制御を行う制御ユニット2と、前方認識装置3が先行車を捕捉したとき或いは捕捉した先行車が離脱したときに報知するブザー6cとを備え、制御ユニット2は、前方認識装置3が先行車をロストしたときはブザー6cによる報知を禁止する。
(もっと読む)
車両用制御装置
【課題】制限速度を認識して車両制御を行なう車両用制御装置において、適度な制御を行なうこと。
【解決手段】車両が走行中の区間における制限速度を認識する複数の制限速度認識手段と、車両の走行に係る駆動力及び制動力を出力する制駆動力出力手段と、車両制御を行なう制御手段と、を備える車両用制御装置であって、前記制御手段は、前記複数の制限速度認識手段のうち二以上の制限速度認識手段により制限速度が認識されており、且つ二以上の制限速度認識手段により認識された制限速度が一致する場合には、該一致した制限速度以下の速度で車両が走行するように前記制駆動力出力手段を制御する認識一致時の制御を行なうことを特徴とする。
(もっと読む)
車両衝突回避支援装置
【課題】障害物との接触回避する際に、衝突回避性能を確保すると同時に、ドライバへの違和感低減、ドライバビリティ向上を実現した車両衝突回避支援装置を提供することにある。
【解決手段】衝突回避演算手段3は、自車両情報検出手段1により検出された自車両の情報と、障害物情報検出手段2により検出された障害物の情報に基づいて、検出された自車両進行方向の障害物と自車両との衝突危険判定を行い、衝突危険判定結果に応じて、ブレーキアクチュエータ5に出力する障害物回避のための制御情報を算出する。衝突回避演算手段3は、障害物との衝突を回避可能な物理限界に基づいて決定される衝突回避限界距離Δxctl2と、障害物の回避運動により自車両に発生する加速度、および加速度変化率に基づいて決定される加速度変化率限定回避距離Δxctl1とを用いて、ブレーキアクチュエータ5により自車両に発生する制動力を制御する。
(もっと読む)
駐車支援装置、駐車支援方法及びコンピュータプログラム
【課題】駐車の困難な駐車スペースに対して駐車を行う場合であっても容易且つ安全に駐車を行わせることを可能とした駐車支援装置、駐車支援方法及びコンピュータプログラムを提供する。
【解決手段】障害物センサ5A,5Bにより自車周囲にある駐車スペースを検出し(S1)、検出された駐車スペースに対して所定旋回舵角で駐車を行う第1走行経路を算出し(S11〜S15)、更に車両を駐車スペースに対して進入させることが可能な範囲で第1走行経路の舵角を緩和した第2走行経路を算出し(S22〜S27)し、算出した第2走行経路に従って駐車の支援を行う(S5)ように構成する。
(もっと読む)
走行軌跡生成方法及び走行軌跡生成装置
【課題】燃費特性を考慮した走行軌跡を生成する走行軌跡生成方法及び走行軌跡生成装置を提供することを課題とする。
【解決手段】車両の将来の走行軌跡を生成する走行軌跡生成装置1であって、少なくとも道路境界線の条件を含む拘束条件を収束演算する拘束条件演算手段30と、拘束条件演算手段での拘束条件を満たしている状態で、少なくとも速度の分散の評価を含む評価関数によって収束演算して走行軌跡を導出する評価関数演算手段30とを備えることを特徴とする。
(もっと読む)
車両の制振制御装置
【課題】 先行車の車輪速等の情報を用いて車輪トルク制御により車体の振動を抑制する車両の制振制御に於いて、先行車の車速又はタイヤ径が自車両のものと異なる場合にも、先行車の情報から適切な車輪トルク補償成分を算定できる装置を提供すること。
【解決手段】 本発明の制振制御装置は、先行車からの情報を受信する情報受信部と、その情報を用いて自車の車体振動の振幅を抑制するよう算定された車輪トルク補償成分を用いて車輪トルクを制御する制振制御部と、制振制御部が車両の車速又は車輪径と先行車の車速又は車輪径に基づいて車輪トルク補償成分を補正する補償成分補正部を含むことを特徴とする。
(もっと読む)
車両用運転支援装置
【課題】本発明は、アダプティブ・クルーズ・コントロール運転において燃料消費率の悪化を抑制できる車両用運転支援装置を提供する。
【解決手段】 車両用運転支援装置40は、先行車両30との車間距離を検出するスキャン式レーザレーダ41とECU50となどを備えている。ECU50は、先行車両認識部51と目標車速演算部53となどを備えている。先行車両認識部51は、スキャン式レーザレーダ41の検出結果に基づいて先行車両30の車速を検出する。目標車速演算部53は、通常追従モードであるかもしくはエコ追従モードであるかを判定する。目標車速演算部53は、自動車10が通常追従モードであると、通常追従モードに対応する加速で先行車両30を追従すべく目標車速を設定するとともに、自動車10がエコ追従モードであると、通常追従モードよりも小さい加速で先行車両30を追従すべく目標車速を設定する。
(もっと読む)
車両用警報装置
【課題】 警報制動前の車両の加速度によって警報開始前後の加速度の変化量に差異があるために引き起こされる、警報によって運転者が違和感を覚えてしまう問題や、警報効果が小さくなってしまう問題を回避する車両用警報装置を提供すること。
【解決手段】 この車両用警報装置は衝突予測時間tが警報制動時間T1に達したときの自車両の加速度aに基づいて、警報制動中の目標加速度bを決定する。その上で、装置はエンジンのスロットルバルブを全閉にすることにより駆動力を0にする。更に、装置は目標加速度bが達成されないと考えられる場合には目標加速度bを達成するような制動力を付与する。衝突予測時間tが警報制動時間T1に達したときの加速度aに基づいて目標加速度bが適切な値に設定され得るから、警報開始前後の加速度の変化量を適切な量にすることができる。
(もっと読む)
車両制御システム、車載装置及び車両
【課題】 発進波遅れによる飽和交通流率の低下を抑制することができ、かつ、車両の発進後は車間距離を適正に保つことができる車両制御システムを提供する。
【解決手段】 路上装置1は、交通信号機4から現在及び将来の信号灯色及びその継続時間に関する信号情報を受信し、当該信号情報を車載装置2に送信する。車両3に搭載された車載装置2は、車両3が停止しているか否かを判定し、かつ、上記信号情報を受信して、現在の信号灯色が赤であるか否かを判定する。車載装置2は、停止しており、かつ、赤であると判定した場合には、信号灯色が赤から青に切り替わると同時に車両3が前進を開始するように、車両3を制御する。また、車載装置2は、先行する車両3よりも小さい加速度で車両3が走行するように速度を制御する。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法
【課題】車線変更の走行制御又は情報提供を行うことにより、自車両が安全に交差点を通過することができる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】運転支援装置は、自車両の位置、前方車両又は後方車両との車間距離などを測位しつつ、通信装置20から受信した車両情報を探索して車両情報で示される車両の中から自車両、前方車両及び後方車両を特定する。運転支援装置は、自車両及び前方車両それぞれの交差点までの距離及び速度並びに信号情報に基づいて、自車両及び前方車両が交差点の手前に停止する停止条件及び交差点に進入する進入条件により決定される特定の状態にあるか否かを判定し、判定結果に基づいて、自車両の車線を変更するか否かを判定する。
(もっと読む)
衝突被害軽減制動制御装置
【課題】前方障害物検知精度を向上させ、衝突被害軽減制動制御装置の作動状況を今より広範囲にすることを目的とする。
【解決手段】本発明の衝突被害軽減制動制御装置は、レーダにより前方障害物が検知された場合(S1)、カーブ推定手段(車線逸脱警報装置)が有効動作していれば(S2)、車間距離をしきい値と比較して(S3)、しきい値を越えていなければ、障害物が、カーブ推定手段にて推定された車線内に基準時間以上存在するか否か判断し(S5,S6)、存在する場合には制動制御を実行する(S7)。カーブ推定手段は、自車が走っている場所ではなく、先行車が走っている自車前方の車線カーブ状態について推定するので、レーダの捉えた障害物が自車の今いる車線の前方に存在するものか否かを精度良く判断することができる。したがって、障害物存在判断にかかる基準時間を、従来に比べて短く設定することが可能である。
(もっと読む)
走行制御装置及び車両
【課題】ドライバによる手動操作でも目標加減速度を容易に達成することができる走行制御装置を提供することを課題とする。
【解決手段】少なくとも車両の加減速を制御する走行制御装置であって、誘導目標加減速度に対応するアクセル操作量又はブレーキ操作量のレンジを誘導目標加減速度外に対応するアクセル操作量又はブレーキ操作量のレンジより広く設定する加減速度特性設定手段を備えることを特徴とし、加減速度特性設定手段では、アクセル操作量と当該アクセル操作量に対応する加減速度との関係及びブレーキ操作量と当該ブレーキ操作量に対応する加減速度との関係を規定する基本マップBM1に対して、誘導目標加減速度を達成するための加減速度に対応するアクセル操作量又はブレーキ操作量のレンジを広く設定したマップGM1を生成する。
(もっと読む)
141 - 160 / 356
[ Back to top ]