
Fターム[3D041AD46]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 車両外部状況 (949)
Fターム[3D041AD46]の下位に属するFターム
Fターム[3D041AD46]に分類される特許
81 - 100 / 356
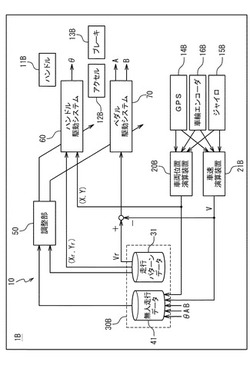
自動運転システム及び自動運転方法
【課題】本発明の目的は、車両に所望の走行パターンを精度良く再現させるための自動運転システム及び自動運転方法を提供することである。
【解決手段】記憶部30Bは、位置目標値時系列データ及び車速目標値時系列データを記憶する。ハンドル駆動システム60は、位置目標値時系列データが記述する位置目標値と第2車両の位置とに基づいて第2車両のハンドル11Bの操舵角を制御する。ペダル駆動システム70は、車速目標値時系列データが記述する車速目標値と第2車両の車速とに基づいて第2車両のアクセルペダル12B又はブレーキペダル13Bの踏み込み量を制御する。ペダル駆動システムは、ペダルオフセットを用いて踏み込み量を制御する。調整部は、位置の変化を表す位置時系列データ、車速の変化を表す車速時系列データ、位置目標値時系列データ、及び車速目標値時系列データに基づいて、ペダルオフセットを調整するためのペダルオフセット調整値を出力する。
(もっと読む)
車速制御装置

【課題】運転者の感覚に合った走行が可能な適切な目標車速に変更できる車速制御装置を提供することを課題とする。
【解決手段】目標車速に基づいて車両の車速を制御する車速制御装置であって、運転者の特性を推定する運転者特性推定手段と、走行中の道路形状を取得する道路形状取得手段と、運転者特性推定手段で推定した運転者の特性と道路形状取得手段で取得した道路形状に基づいて目標車速を変更する目標車速変更手段とを備えることを特徴とする。
(もっと読む)
車間距離制御装置
【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速を検出する車速検出手段2aと、先行車両を検出するとともに自車両と先行車両との車間距離を検出する車間距離検出手段2bと、車間距離を車速で除して算出された車間時間を設定車間時間に制御する車間距離制御を行う車両制御手段2cと、車線変更の開始及び終了を検出する車線変更検出手段2dと、運転者の顔向きを検出する顔向き検出手段2eとを備えるとともに、車線変更検出手段2dにより車線変更の終了が検出されて、車間距離検出手段2bにより先行車両が検出されずに、顔向き検出手段2eにより検出された顔向きが前方以外である場合に、車両制御手段2cが車間距離制御による加速を禁止することを特徴とする。
(もっと読む)
車両
【課題】横追従走行において障害物を有効に回避して追従走行を継続する。
【解決手段】横追従時に、走行を継続した場合の衝突を検知するとブレーキを発動して一旦停止する。その後た障害物との距離と比較し、横追従の車間距離分を移動するのに必要な障害物間の距離を確保するまで進行方向と180°反対の方向へバックさせる。横移動に必要な障害物間の距離を確保した後、処理を縦追従に切り替え、縦追従の車間距離に追従車両の最小旋回半径と追従車両のベクトルで先行車中心から引いた直線の交点を目標点として設定する。縦追従処理開始後は、車間距離を定義された縦車間距離になるまで徐々に車間距離を縮め縦追従に移行する。
(もっと読む)
運転支援装置
【課題】運転者のシステムへの過信や依存を防止することが可能な運転支援装置を提供する。
【解決手段】レーダセンサ12が取得した他車両に関する指標及び車速センサ56が取得した車速に基づいて自車両の最終要求加減速度を取得し、最終要求加減速度に基づいて自車両の減速度を制御するブレーキ制御ECU42を備えるため、自車両周辺の他車両との相対関係や自車両の車速に基づいて自車両の減速度を制御することができる。また、ブレーキ制御ECU42は、取得した危険度である必要加減速度の大きさがKLMTよりも大きい場合に、自車両の運転者に違和感を与えるように自車両の減速度を制御するため、減速時に危険度が大きいときは、運転者は減速度の制御によって違和感を覚えることになり、当該違和感によって運転者のシステムへの過信や依存を防止することが可能となる。
(もっと読む)
運転支援装置
【課題】ドライバの運転意思低下時に適切な運転支援制御を行う運転支援装置を提供する。
【解決手段】自車両前方の環境を認識して操舵機構に操舵力を付与する操舵制御、及び、自車両を減速させる減速制御を行う運転支援装置を、自車両の走行車線を認識する車線認識手段110と、走行車線内に設定された目標走行位置に沿って自車両が走行するように目標操舵力を設定する目標操舵力設定手段140と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵制御手段160と、自車両を減速させる減速制御手段190と、ドライバの運転意思低下を判定する運転意思判定手段180とを備え、操舵制御手段は、運転意思低下の判定に応じて操舵力の付与を中止し、減速制御手段は、運転意思低下の判定に応じて自車両を減速させる構成とする。
(もっと読む)
車両制御装置
【課題】
従来技術によれば、自車左に障害物がある場合、当該障害物を回避するよう制御閾値が設定され、自車は当該制御閾値を超えると逸脱量に従って制御閾値を超えない位置まで戻るよう制御されるが、自車右にリスクを持った対向車が接近している場合でも、対向車の方へ自車を制御するため、運転者にとって恐怖感や違和感を与える、という課題がある。
【解決手段】
車両制御装置は、自車の左に存在する第1の危険度、及び、自車の右に存在する第2の危険度を算出する算出部と、第1の危険度に基づいて第1の制御閾値を自車の左に設定し、第2の危険度に基づいて第2の制御閾値を自車の右に設定する設定部と、第1及び第2の危険度に基づいて、第1又は第2の制御閾値のうち、少なくとも何れか一方を変更する変更部を備える。
(もっと読む)
車間距離制御装置
【課題】運転者の意図しない目標車間距離の変更を防止する車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置1であって、運転者の加速操作を検出する加速操作検出手段13と運転者の減速操作を検出する減速操作検出手段12の少なくとも1つの操作検出手段と、操作検出手段12,13で検出した運転者の加速操作又は減速操作に基づいて目標車間距離を変更する目標車間距離変更手段35とを備え、目標車間距離変更手段35は、操作検出手段12,13で検出した運転者の操作が先行車への追従走行よりも優先する状況に対応するための操作の場合、操作検出手段12,13で検出した操作に基づく目標車間距離の変更を行わないことを特徴とする。
(もっと読む)
操向支援装置
【課題】ドライバの運転意識に応じて操舵制御と制駆動力制御との制御分担比を適切に設定する操向支援装置を提供する。
【解決手段】操向支援装置を、自車両前方の環境情報を認識する環境認識手段110と、自車両の車両状態を検出する車両状態検出手段130と、操舵機構に操舵力を付与する操舵制御手段190と、左右輪の制駆動力差によりヨーモーメントを発生させる制駆動力制御手段200と、環境認識手段及び車両状態検出手段を用いて目標操向量を設定する目標操向量設定手段140と、目標操向量に基づいて操舵制御手段の目標操舵量及び制駆動力制御手段の目標制駆動力差を設定する操向制御手段180と、ドライバの覚醒度Aを検出する覚醒度検出手段160とを備え、操向制御手段は、覚醒度の低下に応じて、操舵制御手段の制駆動力制御手段に対する制御分担比RSTRを増加させる構成とする。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に違和感を与える制御を低減しつつ、側方障害物に対する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】自車両の側方に存在する障害物を検出すると、所定時間後の自車両の将来位置を予測する。また、その予測した自車両の将来位置に基づき障害物に対するリスク度合いを算出する。そして、その算出した障害物に対するリスク度合いに応じて、障害物への接近を防止するように自車両を制御する。ただし、運転者の前記障害物と反対側の隣接車線への車線変更の意思を検出した場合には、障害物への接近を防止する制御を抑制する。
(もっと読む)
車両の前後力制御装置
【課題】障害物等を緊急回避するために車輪の制動力を制御する車両の前後力制御装置において、制御が不必要に継続して車両の安定性を損なうことがないものを提供すること。
【解決手段】障害物回避補助制御として、第1制御、第2制御、第3制御がこの順で続けて実行される。第1制御では、左右輪の前後力差に基づく旋回方向のヨーモーメントを発生させるため旋回内輪の制動力の和が旋回外輪の制動力の和よりも大きくなるよう各車輪の制動力がパルス的に調整される。第2制御では、タイヤの横力を増加させるため車両の全車輪の制動力の総和が第1制御実行中よりも小さくなるよう各車輪の制動力がパルス的に調整される。第3制御では、車体スリップ角の過度の増大を抑制するため旋回内輪の制動力の和が旋回外輪の制動力の和よりも小さくなるよう各車輪の制動力がパルス的に調整される。第1〜第3制御での各パルス調整パターンが第1制御開始前に予め決定される。
(もっと読む)
車両運転支援装置
【課題】運転者による車両の運転操作度合のみならず、車両の安全走行の観点から、車両の運転を適当に支援することができる装置を提供する。
【解決手段】車両運転支援装置10によれば、運転者による車両1の運転操舵度合Ddが低いほど支援閾値THが低く設定される。そして、車両の安全走行のために必要な車両1の運転支援量Spが支援閾値TH_Sp以下であることを要件として、操舵装置11および制動装置12のうち一方または両方の動作が制御される。これにより、車両1の運転操作度合Ddが低くても、車両1の運転支援の必要性が低い場合には操舵装置11等の動作が制御される確率が低くなる。その一方、運転操舵度合Ddが高くても、車両1の運転支援の必要性が高い場合には操舵装置11等の動作が制御される確率が高くなる。
(もっと読む)
車両退避装置
【課題】運転者がハンドルに倒れかかってしまうような状況などであっても適切に車両を誘導することができる車両退避装置を提供すること。
【解決手段】車両の運転者の状態の異常を検知する検知し(S10)、運転者の状態が異常である場合に操舵入力を無効とし(S20)、操舵入力を無効とした状態で操舵制御によって車両の進行方向を調整し車両を退避位置まで誘導する(S22)。これにより、運転者がハンドルに倒れかかっていたりハンドルを握っており操舵系を作動させにくい状態であっても、適切な車両の退避が行える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】駆動系に有する応答性の高いモータを制御することにより、クラッチ断接によるショックの発生を抑えた駆動力制御を行うハイブリッド車両の制御装置を提供する。
【解決手段】エンジン304とモータジェネレータ303の間にクラッチ306を介装し、モータジェネレータ303と駆動輪の間にトランスミッション305を設置した駆動系を備えたハイブリッド車両において、実トランスミッション入力回転数NTを検出するモータ回転数センサ407を設ける。駆動力制御手段は、走行中、クラッチ306の締結状態とトランスミッション305の変速比状態を考慮し、入力回転数の変化を先読みする入力回転数を目標トランスミッション入力回転数NT*とし、実トランスミッション入力回転数NTと目標トランスミッション入力回転数NT*の差分値ΔNTを制御目標とし、これを補填するようモータジェネレータ303の出力トルクを制御する。
(もっと読む)
車両の運転支援装置
【課題】交差点における対向車両の発進を適切に判断し、不要な警報や制御介入を防止する。
【解決手段】交差点で対向車両がいない場合、自車両が交差点を直進或いは左折する場合、対向車両の位置が右折専用レーン或いは左折専用レーンである場合、対向車両のウィンカ或いはハザードランプが点滅している場合、駐車灯が点灯している場合、自車両側の信号機が右折可である場合、対向車両側の信号機が赤である場合、対向車両側の交差点の先の道路が渋滞している場合には、対向車両の発進予測処理を中止し(S16)、それ以外は、対向車両の発進予測処理を実行する(S15)。そして、障害物の衝突リスクを演算して衝突の可能性があるか否かを調べ(S18)、衝突の可能性がある場合、警報出力や自動ブレーキ・操舵等の運転支援制御を実行し(S19)、安全を確保する。
(もっと読む)
車両の運転支援装置
【課題】自車両のドライバが視認可能な障害物と視認困難な障害物との双方に対して適切なタイミングで運転支援を行う。
【解決手段】障害物を検出した場合、自車両のドライバが視認可能な第1の障害物か視認困難な第2の障害物かを判断し(S2)、各障害物の衝突リスク(ベース値)を修正し、第2の障害物の衝突リスクが第1の障害物の衝突リスクよりも大きくなるように調整する(S3)。そして、第2の障害物の衝突リスクR2を閾値Rcと比較し、R2≧Rcのときに第2の障害物に対する警報を出力する(S5)。また、R2<Rcのときには、第1の障害物の衝突リスクR1を閾値Rccと比較し、R1≧Rccの場合、衝突の危険性があると判断して自動ブレーキや回避操舵を行う(S7)ことで、自車両のドライバが視認可能な障害物と視認困難な障害物との双方に対して適切なタイミングで運転支援を行い、安全を確保する。
(もっと読む)
側方障害物回避装置及び側方障害物回避方法
【課題】側方障害物回避の制御による車両挙動の変動を抑制して、運転者への違和感を低減する。
【解決手段】所定時間後の自車両の将来位置に基づき、自車両側方に位置する障害物に対するリスクが高い場合には障害物への接近を防止する方向に自車両を制御する。このとき、運転者による修正操舵が増加する状況と推定する場合には、制御の開始を遅らせたり制御量を小さくしたりして、上記制御を抑制する。
(もっと読む)
走行支援装置
【課題】交通流の円滑化を図ることができる走行支援装置を提供する。
【解決手段】走行支援装置1は、設定車速受信部2、ミリ波レーダ3、クルーズレバー4、車速センサ5、ECU6、エンジン制御部7、ブレーキ制御部8、表示部9、設定車速送信部10を備えている。走行支援装置1では、ECU6によって自車両と先行車両との車間距離が所定の距離以上であり、自車両の設定車速よりも後続車両の設定車速が高い場合に、表示部9によって運転者に後続車両の設定車速が自車両の設定車速よりも高いことが報知される。更に、報知を行ってから所定時間が経過した後に、エンジン制御部7、ブレーキ制御部8によって自車両の設定車速が後続車両の設定車速に変更される。
(もっと読む)
操作支援装置および操作支援方法
【課題】作動機構制御(車両運動制御を含む)において、操作者(車両運転者を含む)の認定や操作者の操作を正確にモニタして推定を行い、この推定結果に基づいて作動機構の動作(車両運動を含む)をより安全かつ快適にすることができる操作支援装置および操作支援方法を提供する。
【解決手段】筋骨格状態検知部を制御して操作者の筋骨格状態情報を取得し、取得された筋骨格状態情報に基づいて、操作者により操作部材の操作が行われるか否かを予測し、操作部材の操作が行われると予測された場合、当該操作部材が操作される前に、作動機構の実動作の前処理動作を実行するか、または、実動作を開始する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、自動変速と手動変速とを設定するための変速設定部における設定内容を示す情報を取得し、前記変速設定部にて手動変速が設定されている場合には、前記所定区間の開始地点に到達する前に、当該加速変速比を示す案内を行う。
(もっと読む)
81 - 100 / 356
[ Back to top ]