
Fターム[3D041AE01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172)
Fターム[3D041AE01]の下位に属するFターム
Fターム[3D041AE01]に分類される特許
101 - 110 / 110
車両の制御装置および制御方法

【課題】 モータ走行可能な車両における騒音を低減する。
【解決手段】 ECUは、低ノイズモードスイッチがオン状態であると(S100にてYES)、車速Vを検知するステップ(S110)と、車速Vがしきい値以上の高速運転であるか否かを判断するステップ(S120)と、高速運転中であると(S120にてYES)、変速ギヤを高速段Hiに選択するステップ(S130)と、高速運転中でないと(S120にてNO)、変速ギヤを低速段Loに選択するステップ(S140)とを含むプログラムを実行する。変速ギヤが低速側Loであると、変速ギヤが高速側Hiである場合に比べて、モータの要求トルクが低く抑えられ、モータの起振力が小さくなり、モータに起因する振動を抑制することができる。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに駆動装置,動力出力装置の制御方法

【課題】 バッテリに過大な電力が入力されるのを抑制する。
【解決手段】 遊星歯車機構にエンジンとモータMG1と車軸に接続された駆動軸とを接続すると共に駆動軸に変速機を介してモータMG2を接続し、モータMG1,MG2と電力のやりとりが可能なバッテリを備える自動車において、アップシフトが要求されたときには(S120)、小さくなる方向に要求パワーPe*を補正し(S130)、補正した要求パワーPe*を用いてエンジンとモータMG1,MG2とを制御する(S160〜S230)。これにより、エンジンから駆動軸に直達伝達されるトルクが小さくなると共にモータMG2から出力されるトルクが大きくなるから、アップシフトの際にイナーシャトルクをキャンセルするためにモータMG2から出力されるトルクを一旦減少させたときでも、バッテリに過大な電力が入力されるのを抑制することができる。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御装置,動力出力装置の制御方法
【課題】遊星歯車機構の潤滑をより適正に行なう。
【解決手段】遊星歯車機構にエンジンとモータMG1と駆動軸とを接続し、駆動軸に変速機を介してモータMG2を接続した自動車において、変速機のブレーキB1,B2を作動する油圧回路100の異常によりブレーキB1,B2の作動に用いられた後のオイルを潤滑剤としてオイル用流路116を介して遊星歯車機構30に供給することができないときには、エンジンを継続して運転する。これにより、ブレーキB1,B2を作動するのに十分な圧送性能を有する機械式ポンプ102からのオイルとブレーキB1,B2を作動するのに必要最低限の圧送性能を有する電動ポンプ104からのオイルとのうちブレーキB1,B2の作動に用いられなかったオイルをオイル用流路116を介して遊星歯車機構30に供給することができ、遊星歯車機構30の潤滑を行なうことができる。
(もっと読む)
車両駆動系制御システム
【課題】ロック機能付ディファレンシャル・トランスファーケースを備えた車両で車両安定化制御を行う。
【解決手段】車両安定化制御システム10はトラクションコントロール用クラッチ16,18の作動を停止し、前記トラクションコントロール用クラッチに逆トルクを加え、車両安定化制御プログラムに基づいてブレーキトルクを加えるようになっているコントローラ17を備えている。エンジントルクの出力を低下させたり、ブレーキパルスを発生させたりする等の方法によってトラクションコントロール用クラッチに逆トルクを作用させることができる。
(もっと読む)
車両の旋回挙動制御装置
【課題】 車両の操縦安定性の向上を図る車両の旋回挙動制御装置を提供すること。
【解決手段】 後輪2c,2dの駆動力に差を付ける左右輪駆動力調整機構6と、各車輪2a〜2dに制動力差を付ける制動力調整機構9と、前輪2a,2bの舵角を調整する前輪補助操舵機構3と、車両1の挙動を検出する車速センサ13,ハンドル角センサ14及びヨーレイトセンサ15と、各センサ13,14,15により検出された車速V、操舵角θ及びヨーレイトψに基づいて前輪補助操舵機構3,左右輪駆動力調整機構6及び制動力調整機構9を統合的に制御する制御装置12とを有し、制御装置12は左右輪駆動力調整機構6または制動力調整機構9の少なくとも一方を作動させる前に前輪補助操舵機構3を作動させるようにした。
(もっと読む)
車両の減速度制御装置
【課題】 減速度制御モードを簡単操作で解除できるとともに、その解除時のブレーキ力変動を抑制する。
【解決手段】 シフトレバーを「D」ポジションに保持したままでも、ステアリングコラムの減速度設定手段の操作で減速度制御モードへ移行することが可能で、シフトレバーのD→E→Dシフトでその減速度制御モードを解除できるだけでなく、ステアリングコラムの減速度設定手段の操作で目標減速度がDレンジ相当まで復帰した場合にも、減速度制御モードが解除される。目標減速度がDレンジ相当まで復帰して減速度制御モードが解除される場合は、ステップS6で減速度制御が直ちに終了させられるが、シフトレバーのD→E→Dシフト、或いはE→Dシフトで減速度制御モードが解除される場合は、ステップS3で目標減速度が徐々に低下させられる。
(もっと読む)
車両運動制御装置および車両運動制御方法
【課題】走行環境に拘わらず、車両の運動状態を安定させることにより、車両の操安性の向上を図る。
【解決手段】算出部10aは、車両の運動状態を表す状態方程式のシステム行列に基づいて、システム行列を構成する複数の要素a11〜a22のうちの少なくとも一つの要素を表す多項式に含まる、前輪のすべり角βfと後輪のすべり角βrとを変数とする非線形項を算出する。設定部10bは、算出された非線形項に基づいて、それぞれの車輪に対する駆動力配分比rまたは荷重配分比r'の目標値r*を設定する。
(もっと読む)
運転者への通知方法および通知装置
手動切替トランスミッションを有する車両の運転者に通知する通知方法と通知装置が提案される。その通知は運転者に、クラッチペダルを操作すべきことを指示し、エンジン回転数がしきい値を下回った場合に出力される。 (もっと読む)
車両の長手方向の移動を制御する方法
本発明は、特に長手方向移動制御システムを用いて、車両(3)の長手方向の移動を制御する方法に関する。閾値速度を超える車速については、前方走行車両(8)が検出されない場合は、車速はより高い選択された設定速度に調整され、前方走行車両(8)が検出された場合は、この前方走行車両(8)からの距離が調整される。車両が閾値速度未満の速度で走行している場合は、前方走行車両(8)が検出された場合にのみ、車両(3)の長手方向の移動が制御される。この結果、車間距離制御システムが、比較的大きい速度範囲に渡って実施され得る。 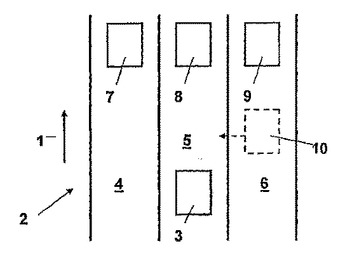 (もっと読む)
(もっと読む)
自動車の1つまたは数個の機能に関する改善した自動制御の方法並びにシステム。
本発明は、陸上自動車の機能に関する改善した自動制御の方法であって、自動車の機能の自動制御と、地上の自動車位置(x,y)の計測と、予め記憶された1つまたは数個の位置に対するその自動車位置の比較とを含む当該方法に関する。前記予め記憶された各位置は、制御自動操作が以前に所定の許容範囲を超える制御を行ったと判定された位置であり、自動車の計測位置が予め記憶された位置のうちの1つと整合する場合には、予め記憶された特殊制御情報が使用され、その制御が前記所定の許容範囲を更にもう一度超えてしまう危険性を低下させる。また本発明は、自動車の1つまたは数個の機能に関する自動制御の評価と、自動制御が前記所定の許容範囲を超える処置を実行したとその評価が示した地上の位置(x,y)の記憶とを更に含む。 (もっと読む)
101 - 110 / 110
[ Back to top ]