
Fターム[3D041AE01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172)
Fターム[3D041AE01]の下位に属するFターム
Fターム[3D041AE01]に分類される特許
81 - 100 / 110
車線逸脱防止装置
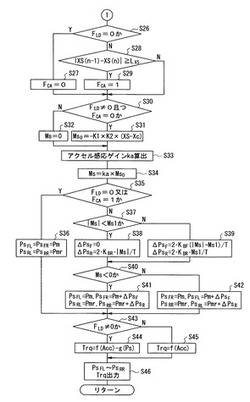
【課題】自車両が走行車線から逸脱する可能性があると判断されたとき、これが運転者による意図的なものであるか否かを正確に判断して、逸脱回避方向への進路修正を的確に行う。
【解決手段】運転者が方向指示器を操作することなく、自車両が走行車線から逸脱する可能性があると判断されるときに、逸脱回避方向の目標ヨーモーメントMs0を算出し(ステップS31)、次に、アクセル操作に連動したスロットル開度Aに応じたアクセル感応ゲインkaを算出し(ステップS53)、このアクセル感応ゲインkaに応じて目標ヨーモーメントMs0を補正する(ステップS54)。
(もっと読む)
速度制御装置、及び、このような速度制御装置を備える車両

本発明は、制御装置(12)とユーザーインタフェース(26)とを備える、車両のための速度制御装置に関する。制御装置(12)において、制御戦略が異なり、かつ少なくとも1つのエコモード(E)を含む複数の駆動モード(N、E)、が実現されている。エコモード(E)の制御戦略は、燃料節約型の走行形態に最適化されている。ユーザーインタフェース(26)は、駆動モードを選択するための入力装置(32)を有する。有利に、ハイブリット車両において使用される。制御戦略は、ハイブリッド車両の異なるパラメータ(充電状態、電動機の出力、回生ブレーキの範囲)に対して調整されることが可能である。 (もっと読む)
車両制御装置
【課題】乗員が期待する加速感を実現することが可能な車両制御装置を提供する。
【解決手段】乗員の加速に対する期待感を反映するアクセル開度又は開度速度に基づいて、加速期待値としてのシートバックジャーク目標値jb0を演算する加速期待値推定部11と、シートバックジャーク目標値jb0を実現するために必要な車両の前後ジャーク目標値jx0を演算する前後ジャーク目標値演算部12と、前後ジャーク目標値jb0が実現されるように車両のエンジン16が発生するトルクを制御するエンジン制御部13とを、車両制御装置10に設ける。
(もっと読む)
車両用パワートレーンの制御装置
【課題】再加速の要求がある運転モードにある間の車両減速後の再加速時の応答遅れを、エンジンの出力特性を変更することにより防止する。
【解決手段】 運転モードが再加速対応モードである間、アクセル開度APOをt1に低下させ、t2より再び増大させる場合、車両の減速後の再加速時に駆動力を増加させるようt1からt2までのアクセル開度低下状態のもとで、エンジン出力特性を変更し、再加速時t2の応答性を高める。
(もっと読む)
運転者状態判定装置および車両の走行安全装置
【課題】運転者の状態を適切かつ高精度に判定すると共に、接触回避動作の実行以後において車両を適切に走行させる。
【解決手段】走行制御部26は、接触判定部25の判定結果に応じて、物体と自車両との接触発生を回避あるいは接触発生時の被害を軽減するようにして自車両の走行状態を制御する走行制御の実行タイミングおよび制御内容の少なくとも何れかを設定し、接触回避動作として自車両の加速制御または減速制御または操向制御を実行する。運転者状態判定部28は、接触回避動作の作動以後の所定時間内に運転者による所定操作量以上の運転操作が入力されたか否かの判定結果に応じて運転者の状態(例えば、運転に適さない状態等)を検知する。
(もっと読む)
自動運転制御装置
【課題】自動運転からマニュアル操作による運転に切換えられた後、ドライバの運転操作が適正であるかどうかチェックされた上で自動運転が完全に解除される自動運転制御装置を提供する。
【解決手段】本発明の自動運転制御装置には、ドライバが自動運転解除要求を行った後、実運転をドライバが引き継ぐまでの間に、ドライバが適正な運転操作を行い得るかどうかを判定する自動運転解除可否判定手段が設けられている。この自動運転制御装置は、S163〜S168に示されるように、ドライバによる運転操作と自動運転制御装置が最適と判断する運転操作とを比較して、この比較結果が一定時間、一定値以内であれば、ドライバは適正な運転をすることができると判定する。
(もっと読む)
ハイブリッド車両の通信異常対応制御装置
【課題】 統合コントローラから各コントローラへの情報伝達が不能となる通信異常時、電力供給とクリープトルクの発生により、エンジン燃料が無くなるまで走行を確保することができるハイブリッド車両の通信異常対応制御装置を提供すること。
【解決手段】前記統合コントローラ10から各コントローラ1,2への情報伝達が不能となる通信異常検出時、前記統合コントローラ10からの指令に代え、各コントローラ1,2からの独立した指令により、HEVモードを選択し、前記モータジェネレータMGによりシステム動作を維持できる発電トルクを発生しつつ、前記エンジンEの制御により走行に必要なクリープトルクを発生する手段とした。
(もっと読む)
車両安定化制御装置
【課題】車輪速度を利用して求めるヨーレートを車両安定化制御の開始条件として用いる車両安定化制御装置において、適切に車両安定化制御中の制御量を決定できるようにする。
【解決手段】車両安定化制御の開始条件の判定には、駆動輪の車輪速度の差に基づいて求めた第2のヨーレート(駆動輪ヨーレート)と操舵角および車速に基づいて求めた目標ヨーレートを用い、車両安定化制御における制御量の決定には、ヨーレートセンサ7bの検出信号から求めた第1のヨーレートと操舵角および車速に基づいて求めた目標ヨーレートを用いる。つまり、車両安定化制御の開始条件の判定のときには車輪速度を利用して求められるパラメータを用い、車両安定化制御における制御量の決定のときには車輪速度を利用しないで求められるパラメータを用いる。
(もっと読む)
運転装置の制御装置
【課題】モードの設定が初期化された場合であっても、操作性の問題の発生を防止できる運転装置の制御装置を提供する。
【解決手段】障害者が運転するための障害者モードと健常者が運転するための健常者モードとが選択的に設定される運転装置を制御するためのECU50において、ECU50にリセットが発生したことによりモードの設定が初期化された場合に、初期化前に設定されていたモードに再設定する。これにより、モードの設定が初期化された場合であっても、操作性の問題の発生を防止できる。
(もっと読む)
動力出力装置およびこれを搭載する車両並びに動力出力装置の制御方法
【課題】二次電池などの蓄電装置の状態に応じて要求される駆動力の急変に対処する。
【解決手段】バッテリの入出力制限Win,Woutに基づく制御用上下限回転数Necmin,Necmaxをエンジン22の上下限回転数Nemin,Nemaxとして設定し(S120)、その範囲内で制限すると共にバッテリの入出力制限Win,Woutの範囲内でエンジンを含む回転系とのエネルギの入出力を伴って要求トルクTr*を出力する制御(S130〜S200)が可能なときにはその制御を実行し、制御が可能でないときには、より広い範囲の性能用上下限回転数Nmin,Nmaxをエンジン22の上下限回転数Nemin,Nemaxとして設定して同様に処理し(S230,S130〜S200)、バッテリ50の入出力制限Win,Woutの範囲内で要求トルクTr*を出力する(S240〜S300)。
(もっと読む)
車両および駆動装置並びにこれらの制御方法
【課題】走行に要求される要求駆動力(要求制動力)を出力すると共に変速時の変速ショックを抑制する。
【解決手段】アクセルオフの状態でモータMG2の出力を変速して駆動軸に出力する変速機の変速要求があるときには(S130)、モータMG2から下限制限Tset以上の制動トルクが出力されるようエンジンの回転数を押さえ込むモータMG1から出力するトルクをトルク制限Tlimにより制限すると共に(S160,S170)、モータMG2から出力するトルクを下限制限Tsetにより制限する(S190,S200)。これにより、駆動軸に目標制動トルクTr*を出力すると共に変速機の変速の際に生じ得るトルクショックを抑制することができる。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに駆動装置,動力出力装置の制御方法
【課題】遊星歯車のサンギヤ,キャリア,リングギヤに第1モータ,内燃機関,駆動軸をそれぞれ接続すると共に変速機を介して駆動軸に第2モータを接続した自動車において、内燃機関の出力にバラツキが生じても、変速比の変更をスムーズに行なうと共に変速比を変更する際に予期しない駆動力が出力されるなどの不都合を抑制する。
【解決手段】第1モータが力行運転され第2モータが回生運転により負のトルクが出力されているときに変速機の変速要求がなされたとき、エンジンの吸気温taと要求トルクTr*とに基づいて補正トルクTαを設定し(S230)、エンジンから駆動軸に直接伝達される直達トルクが要求トルクTr*よりも補正トルクTαだけ小さいトルクに一致すると共に補正トルクTαに見合う正のトルクが第2モータから出力されるようエンジンと二つのモータとを制御し(S240〜S260)、この状態で変速機の変速を行なう(S280)。
(もっと読む)
車両および動力出力装置並びに車両の制御方法、動力出力装置の制御方法
【課題】最高車速近傍の車速Vで走行しているときの車速Vを安定させると共にそのときの運転者の操作フィーリングの悪化を抑制する。
【解決手段】車速Vが閾値Vref以上のときには、車速Vに対してヒステリシスをもって制御用車速Vhisを設定し(S160〜S180)、制御用車速Vhisに基づいてトルク補正値kを設定し(S190)、トルク補正値kを用いて要求トルクTr*を補正して実行トルクT*を設定し(S200)、エンジンと2つのモータを制御して実行トルクT*を車軸に出力する。これにより、最高車速近傍の車速Vのときに、車速Vの若干増減に伴って実行トルクT*が頻繁に変動するのを抑制することができ、車速Vを安定させることができる。この結果、最高車速近傍の車速Vにおける運転者の操作フィーリングの悪化を抑制することができる。
(もっと読む)
車両の減速制御装置
【課題】 減速運転時に車両の積載重量に左右されない安定した減速特性を実現できるようにする。
【解決手段】 減速時燃料カット期間中に、要求減速度を実現するために、発電機の目標発電量GEを操作して減速度を制御する第1の減速制御と、目標スロットル開度THを操作して減速度を制御する第2の減速制御と、目標ブレーキ作動量BKを操作して減速度を制御する第3の減速制御とを組み合わせて実行する。その際、積載重量センサで検出した車両の積載重量に応じて減速制御パラメータ(目標発電量GE、目標スロットル開度TH、目標ブレーキ作動量BK)を補正することで、車両の乗車人数、積載荷物量、燃料量等の変化によって車両の積載重量が変化しても、それに応じて減速制御パラメータを補正して積載重量の変化による減速特性の変動を抑制する。
(もっと読む)
車両のロール特性推定装置、及び該装置を用いた車両のローリング運動安定化制御装置
【課題】 車両のロール増大傾向の現われ易さを示す指標として、ロール指標を精度よく推定する。また、ローリング運動の安定化制御を適切に行なう。
【解決手段】 ローリング運動検出手段M1が検出する実ローリング運動と、横加速度検出手段M2が検出する横加速度に基づきローリング運動推定手段M3にて演算する推定ローリング運動との比較結果に応じて、ロール指標推定手段M4にて、車両のロール増大傾向の現われ易さを示すロール指標を推定する。このロール指標に応じて設定するロール増大傾向判定基準に基づき、制動力制御及び駆動力制御のうち少なくとも一方の制御を行なう。
(もっと読む)
車両の走行制御装置
【課題】四輪操舵装置とACCシステムとの協調を図り、運転者に違和感を与えてしまうのを防止する。
【解決手段】車両の走行制御装置は、ACCの設定車間距離を設定したときの運転者の意思に合致するように、車輪の操舵制御特性を設定する。具体的には、設定車間距離が「短」の場合、後輪操舵制御ゲインを大きい値にすることで、運転者がステアリング操作したときの自車両100の挙動を機敏して(ヨーレイトや横移動速度を大にして)、設定車間距離が「長」の場合、後輪操舵制御ゲインを小さい値にすることで、運転者がステアリング操作したときの自車両100の挙動を緩慢にする(ヨーレイトや横移動速度を小にする)。
(もっと読む)
車両の走行制御装置
【課題】複数の装置において情報を共有することを可能とし、制御性の向上した車両の制御装置を提供することにある。
【解決手段】OS切替手段(OS-CH)は、複数個のオペレーティングシステム(OS1,OS2)を切り替える。共有オブジェクト(CO)は、複数個のオペレーティングシステムから参照可能なメモリ資源を有している。共有オブジェクト(CO)は、少なくとも道路情報を共有し、一方のオペレーティングシステムのアプリケーションが登録した道路情報を、他方のオペレーティングシステムのアプリケーションから参照可能である。
(もっと読む)
ハイブリッド車両のモード遷移制御装置
【課題】 モータ回生減速からエンジンブレーキへのスムーズな移行を達成し運転フィーリングの悪化を抑えることができるハイブリッド車両のモード遷移制御装置を提供する。
【解決手段】 ハイブリッド車両で、エンジンEとモータジェネレータMGとの間に第1クラッチCL1を介装すると共に前記モータジェネレータMGと駆動輪との間に第2クラッチCL2を介装し、前記モータジェネレータMGによるモータ回生減速時にエンジンブレーキ要求があるか否かを判断するエンジンブレーキ要求判断手段(ステップS3)を設け、前記モード遷移制御手段は、エンジンブレーキ要求判断に基づき、モータ回生減速からエンジンブレーキへの移行指令が出た場合(ステップS5)、締結されている前記第2クラッチCL2を開放側にした後、開放されている前記第1クラッチCL1を締結してエンジンブレーキへ移行する(ステップS6〜ステップS11)手段とした。
(もっと読む)
車両用走行制御装置
【課題】 先行車両を追従しながら走行制御する際、先行車の加減速の状態に関わらず、自車両が安全にカーブを走行することができる車両用走行制御装置を提供する。
【解決手段】 カーブ走行用目標加速度演算部40は、カーブ走行用目標加速度atcを算出する。第一カーブ走行用目標加速度演算部42は、緩カーブに対応する第一目標加速度at1を算出し、第二カーブ走行用目標加速度演算部43は、急カーブに対応する第二目標加速度at2を算出する。カーブ走行用目標加速度atcは、第一目標加速度at1および第二目標加速度at2の小さい値とされる。追従用目標加速度演算部20は、追従用目標加速度atfを算出し、定速用目標加速度演算部30は、定速用目標加速度atuを算出する。調停部4は、カーブ走行用目標加速度atc、定速用目標加速度atu、および追従用目標加速度atfのうち最小値を目標加速度として選択する。
(もっと読む)
車輌の制駆動力制御装置
【課題】できるだけ車輌に要求される制駆動力及びヨーモーメントに近く運転者の運転操作の状況に適した制駆動力及びヨーモーメントを達成する。
【解決手段】車輌に要求される目標制駆動力Fvn及び車輌の目標ヨーモーメントMvnが演算され(S20)、各車輪の制駆動力によっては何れかの目標を達成できないときには(S40)、運転者の加減速操作を示す値の大きさが大きいほど小さく、運転者の操舵操作を示す値の大きさが大きいほど大きくなるよう配分比率Kが演算され(S60)、各車輪の制駆動力により達成可能な制駆動力及びヨーモーメントの範囲を示す四辺形100の外形線のうち目標制駆動力Fvn及び目標ヨーモーメントMvnの点Pに最も近い直線Lが特定され(S80)、配分比率Kに基づく直線Lの内分点である目標点Rの座標の値が補正後の目標制駆動力Fvt及び目標ヨーモーメントMvtとされる(S90、100)。
(もっと読む)
81 - 100 / 110
[ Back to top ]