
Fターム[3D041AE01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172)
Fターム[3D041AE01]の下位に属するFターム
Fターム[3D041AE01]に分類される特許
21 - 40 / 110
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
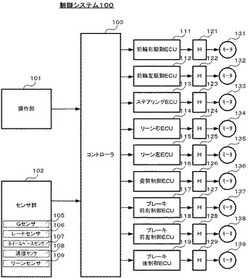
【課題】姿勢制御機能を有する車両の、悪路での乗り心地を改善する。
【解決手段】姿勢制御用のコントローラ103は、センサ群102から供給される路面状況に基づいて、車両の運動及び姿勢を制御するアクチュエータ131〜139の制御量を制御し、路面が悪路になると、姿勢制御のゲインを下げ、トルクを増加させることにより、サスペンションによらず、乗り心地を改善する。悪路の判定は、単位時間あたりの加速度の変動回数の検出、車輪の乗り上げの検出などにより行う。
(もっと読む)
連結車両、連結車両における連結圧力制御方法ならびにプログラム

【課題】連結車両において、連結部の高い信頼性を確保すること。
【解決手段】牽引車2は、動力源としてエンジン10を備え、ドーリ5、5aは、動力源として電動機11、11aを備えると共に当該電動機11、11aの電源としての電池12、12aを備え、エンジン10、電動機11、11aを連携動作させる連携制御部13、13a、13bを備え、この連携制御部13、13a、13bは、牽引車2、第1の被牽引車4、第1のドーリ5、第2の被牽引車4aの連結部に加わる圧力が所定値以下または所定値未満になるようにエンジン10、電動機11、11aを連携動作させる。
(もっと読む)
駆動力制御装置
【課題】運転者の操作遅れ等も加味して各輪に駆動力を配分することができる駆動力制御装置を提供することを課題とする。
【解決手段】本装置は、地図情報から、現在と先方のコーナー曲率を得て各々で規範ヨーレートを演算し、運転者のハンドル操作から運転者が望むヨーレートを演算し、現在車両で発生しているヨーレートを求め、これら3つのヨーレートの各々の差分から必要ヨーモーメントを求め、当該必要ヨーモーメントに現在の車両状態を引数として決定した重み係数を掛けたものの和を駆動力差による要求ヨーモーメントとし、当該要求ヨーモーメントより各輪の駆動力を求める。
(もっと読む)
姿勢安定化制御装置及び車両
【課題】車両の運動状態を動的にモニタし、安定した制御を可能とすることである。
【解決手段】コントローラ103は、車両の運動の目標値を設定する目標値演算部212,213と、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算部216,217と、車両の運転状態を検出する運転状態検出部と、目標値に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する目標安定余裕度演算部218と、車両の運転状態に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する実安定余裕度演算部219と、生成された制御量を、補正量を用いて補正する調停処理部222と、補正された制御量を用いて、アクチュエータを制御する駆動部と、を備える。
(もっと読む)
車両の乗客監視装置
【課題】車室内における座席に着座していない乗員の状態を識別し、乗客の年齢等の識別信号によって、座席に着座していない乗員の年代に対応した状態を検知し、かかる識別信号に対応した運転制御ができる車両の乗客監視装置を提供する。
【解決手段】車両の車室内における乗員の動きを検知して、車両内の乗員の状況を監視する車両の乗客監視装置において、前記車室内における乗員の状況を検知する乗員状態検知装置と、該乗員状態検知装置からの乗員状況検知信号を受信して該乗員状況検知信号から座席に着座していない乗員を識別すると、該乗員識別信号を表示警報装置を介して運転者に検知させるとともに、前記車内の不安定状態を識別するとエンジン制御装置及びブレーキ制御装置をそれぞれ制御して前記車両の走行状態を加減する制御装置とを備える。
(もっと読む)
制御システムおよびそれを備えた鞍乗り型車両
【課題】低コスト化が実現された制御システムおよびそれを備えた鞍乗り型車両を提供する。
【解決手段】シフトペダル210に荷重が加えられると、その荷重は第1のリンク機構220およびシフト軸250等を通して変速機5に伝達される。第1のリンク機構220には、シフトペダル210に荷重が加えられることによりバネの付勢力に抗して移動する可動部材と第1のスイッチSW1とが設けられる。第1のスイッチSW1は可動部材が所定距離移動することによりオンする。このとき、ECU50はエンジンの出力調整を行う。シフト軸250の回転角度に応じてオン/オフが切り替えられる第3のスイッチSW3が設けられる。第3のスイッチSW3は、シフト軸250が回転している状態から基準角度に戻ることによりオフからオンに切り替えられる。このとき、ECU50はエンジンの出力調整を禁止する。
(もっと読む)
車間距離制御装置
【課題】自車両が被牽引車両を牽引する場合に安全な制動距離を確保することができると共に、走行安定性を高めることができる車間距離制御装置を提供すること。
【解決手段】自車両と先行車両との車間距離を制御する車間距離制御装置10において、自車両が被牽引車両を牽引しているか否かを判定する判定手段12と、自車両と先行車両との目標車間距離を判定手段12の判定結果に応じて決定する車間距離決定手段14と、自車両の目標加減速度を判定手段12の判定結果に応じて決定する加減速度決定手段16と、目標車間距離及び目標加減速度に基づいて自車両を制御する制御手段18とを備える。
(もっと読む)
加速度制御装置及び加速度制御プログラム
【課題】車両の走行状態に応じて生じ得る加速度制御の遅れを抑制する。
【解決手段】減速操作を終えた直後にドライバ要求加速度を上回るACC要求加速度で加速度制御(ACC)が開始された場合、従来の制御(a)では、ACC開始時点での実加速度をジャーク制限後要求加速度の初期値としてジャーク制限が行われるため、ACC要求加速度は加速を要求しているにもかかわらす、時刻t1から時刻t2まで不要な減速を行ってしまう。これに対し、本発明の制御(b)では、加速度制御が開始された時点での実加速度及びドライバ要求加速度のうち、ACC要求加速度との差が小さい方をジャーク制限後要求加速度の初期値として設定する。このため、ドライバ要求加速度が初期値として設定されることとなり、実加速度がドライバ要求加速度まで迅速に上昇することの妨げにならない。
(もっと読む)
車両運動制御システム
【課題】駆動力配分制御装置と制動力制御装置とを協働させる構成において、動荷重に対する駆動力配分制御装置の耐久性を維持できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、左右の駆動輪11RR、11RLに駆動力を付与すると共に左右の駆動輪11RR、11RLへの駆動力配分を制御できる駆動力配分制御装置2と、各駆動輪11RR、11RLの制動力を独立して制御できる制動力制御装置3とを備える。この車両運動制御システム1では、駆動力配分制御装置2と制動力制御装置3とが協働して車両運動制御を行う。また、車両10がカウンターステア状態にあるときに、駆動力配分制御装置2が駆動力配分制御を停止すると共に制動力制御装置3が制動力制御を行う。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】運転者の心理的状態に対応した適切な車速の制御を行うことはできなかった。
【解決手段】自車両の前方の下り勾配の道路を走行する際に前記自車両の運転者に心理的影響を与える要因を示す要因情報を取得し、前記要因情報に基づいて前記下り勾配の道路を走行する際に前記運転者に与えられる総合的な心理的影響を取得し、前記総合的な心理的影響に応じて前記自車両に搭載された車速制御部に車速を制御させる。
(もっと読む)
車両挙動安定化装置
【課題】高摩擦係数路面走行中の減速制御中に低摩擦係数路面に入った場合やフェール制御により駆動輪スリップ率が激増した場合でも即座に駆動輪スリップ率を低下させ車両挙動の安定を確保する車両挙動安定化装置を提供する。
【解決手段】車両挙動不安定検出手段、原動機の状態に応じて原動機出力を制御する原動機制御手段、原動機制御手段の原動機出力の車輪への伝達を制御する原動機出力伝達制御手段、車両の駆動輪のロック傾向を検出する駆動輪ロック傾向検出手段を備え、原動機出力伝達制御手段が、減速制御実行中に駆動輪ロック傾向検出手段の出力が第1所定範囲にあるときに駆動輪ロック傾向検出手段の出力に基づいて伝達比を制御し駆動輪ロック傾向検出手段の出力が第1の所定範囲よりも強いロック傾向を示す第2の所定範囲にあるときに原動機出力の車輪への伝達を途絶する。
(もっと読む)
車間距離制御装置
【課題】交通事故を未然に防ぐことができる車間距離制御装置を提供すること。
【解決手段】車間距離制御装置は、自車の位置を示す自車位置情報を衛星通信により取得する。自車の周囲に他車が存在する場合、他車に搭載された車間距離制御装置に対して無線通信を行い、他車の位置を示す他車位置情報を全て取得する。地図を表す地図データベースを参照して、全ての他車位置情報の中から、自車の前後に存在する特定他車の位置を示す特定他車位置情報を特定する。自車位置情報が示す位置と特定他車位置情報が示す位置とに基づいて、自車と特定他車との距離を表す車間距離を算出する。自車の速度を計測し、速度と適切な車間距離とを対応付ける距離データベースを参照して、自車の速度に対応する適切な車間距離として検索適切車間距離を検索する。車間距離が検索適切車間距離よりも短い場合、その旨を表す注意情報を自車の運転手に通知する。
(もっと読む)
車両統合制御システムおよび車両統合制御プログラム
【課題】開発および保守が容易な車両統合制御システムを提供する。
【解決手段】1つまたは複数の車両サブシステム10を制御することで、予め定められた機能を実行する複数のサービス(サービス実行プログラム)を備える。そして、統合サービスを実行するサービスシナリオSSは、それらのサービスを組み合わせたものとする。これによって、サービスシナリオSSは、車両サブシステム10を直接制御するプログラムとする必要がなくなる。そのため、サービスシナリオSSを開発する際には、サービスを組み合わせることに関する制御部分を開発すればよいことになる。従って、サービスシナリオSSの開発が容易になる。また、サービスシナリオSSの制御対象はサービスとなっているので、車両サブシステム10の構成が変更になった場合であっても、その変更がサービスシナリオSSに及ぼす影響の程度は小さくなる。そのため保守が容易になる。
(もっと読む)
車両用走行制御装置
【課題】追従走行時のユーザ利便性を向上させた車両用走行制御装置を提供すること。
【解決手段】車両に搭載され、自車両の車速を目標車速に制御する車両用走行制御装置が、先行車に対する追従走行中、運転者によりブレーキペダルが踏み込まれ、次いで、運手者によりブレーキペダルが離されたとき、上記目標車速をブレーキOFF時の自車両車速に変更する目標車速変更手段と、ブレーキOFF時の先行車との車間距離D2がブレーキON時の先行車との車間距離D1より短いとき(D2<D1)、上記目標車速変更手段による上記目標車速の変更を禁止する目標車速変更禁止手段と、を有する。
(もっと読む)
車間距離制御装置
【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速Vを検出する車速検出手段2aと、自車両と先行車両との車間距離Lを検出する車間距離検出手段2bと、車速Vを設定車速VSに制御する及び車間距離Lを車速Vで除して算出された車間時間Tを設定車間時間TSに制御する車両制御手段2cと、自車両の後側方の他車両を検出する後側方検出手段2dと、車間距離Lが車線変更を行うために必要な所定車間距離LC以下となった場合で、後側方検出手段2dが自車両の後側方の他車両を検出しない場合に、車線変更時期を報知する報知手段2eを備えることを特徴とする。
(もっと読む)
自動車およびその制御方法
【課題】先行車両に追従する定速走行中の制御時における車両のエネルギ効率の向上を図る。
【解決手段】レーダクルーズコントロール制御によって車両に比較的大きな制動力が要求されているときには、運転者によってブレーキペダルが踏み込まれたときより小さな速度V2を置き換え車速Vchに設定し(S230)、車速Vが置き換え車速Vch以上のときには、要求制動トルクTr*の範囲内でモータを回生制御し(S150〜S170)、車速Vが置き換え車速Vch未満のときには、モータによる制動トルク(回生トルク)を油圧ブレーキによる制動力にスムーズに置き換える(S180,S190)。これにより、レーダクルーズコントロール制御中の車両のエネルギ効率を向上させることができる。
(もっと読む)
車両の挙動制御装置
【課題】旋回状態指標値が所定の条件を満たしたときに車両の駆動出力制限を実行する車両の挙動制御装置に於いて、従前の挙動制御とは異なる条件に応じて挙動制御に於ける駆動出力制限の解除又は駆動出力制限の程度の軽減ができ、早期に車両が運転者の意図通りに速やかに加速できるようにすること。
【解決手段】本発明の車両の挙動制御装置は、アンダーステア、オーバーステア、スピン、ドリフトアウト等の挙動の悪化を回避するために、車両の駆動出力制限を実行する駆動出力制限手段を含み、制御旋回状態指標値が所定の条件を満たしていても、操舵角の大きさが所定角度を下回ったときに、駆動出力制限手段が駆動出力の制限の少なくとも一部を解除する。
(もっと読む)
車両の制御装置
【課題】車体の多様な上下振動(バウンシング)を適切に抑制することができる車両の制御装置を提供する。
【解決手段】前後輪を独立して車体に支持するサスペンション機構と、前後輪の制・駆動力を独立して制御可能な制駆動力制御手段(ステップS4)と、走行もしくは制動のために前後輪に作用させる制・駆動力とは別に振動抑制駆動力および振動抑制制動力を前後輪に作用させることにより車体の上下振動を抑制する上下振動抑制手段(ステップS4)とを備えた車両の制御装置において、車体のばね上変位量とばね上速度とばね上加速度とから車体の上下振動を検出する上下振動検出手段(ステップS1,S2)と、車体のばね上変位量およびばね上速度およびばね上加速度の3つのパラメータに基づいて振動抑制駆動力および振動抑制制動力を算出する振動抑制力算出手段(ステップS3)とを備えている。
(もっと読む)
車両制御装置
【課題】ステアリングアクチュエータを小型化できる、車両制御装置を提供することである。
【解決手段】転舵角が最大になっているときに、運転者がさらに旋回力を与えようとしてステアリングホイール10をさらに回そうとすると、トルクセンサ40からECU120に与えられる操舵トルクが所定の値よりも大きくなる。このとき、ECU120は、デファレンシャル部150を制御して旋回方向の外側の車輪に与えられる駆動力が内側の車輪に与えられる駆動力よりも大きくなるように左右配分を行うと同時に、制動圧制御ユニット160を制御して旋回方向の内側の車輪に与えられる制動力が外側の車輪に与えられる制動力よりも大きくなるように左右配分を行う。
(もっと読む)
追尾システム及びその方法並びに車両
【課題】GPSが利用できない環境下であっても安定した追尾走行を実現すること。
【解決手段】先導車両1は、車輪の回転数と操舵角とをパラメータとし、所定の演算式に基づいてある原点からの位置と姿勢とを推定し、推定した位置及び姿勢と自己の周辺の環境情報とに基づいて環境マップを作成し、環境マップを後続車両に送信し、後続車両2は、車輪の回転数と操舵角とをパラメータとして所定の演算式に基づいてある原点からの位置と姿勢とを推定するとともに、周辺の環境情報と先導車両からの環境マップとを照合することにより自己の位置と姿勢とを推定し、車輪の回転数と操舵角とに基づいて推定した自己の位置と姿勢及び環境マップに基づいて推定した自己の位置及び姿勢とに基づいて、最終的な自己の位置及び姿勢を決定する。
(もっと読む)
21 - 40 / 110
[ Back to top ]