
Fターム[3D043EF09]の内容
動力伝達装置の配置〜駆動 (10,444) | 4WDにおける制御、制御対象 (1,466) | 電気的制御 (123)
Fターム[3D043EF09]に分類される特許
41 - 60 / 123
四輪駆動車両の駆動力制御装置
【課題】発進性の向上を図ることが可能な四輪駆動車両の駆動力制御装置を提供する。
【解決手段】四輪駆動車両の駆動力制御装置1は、エンジン2での発生トルクをトランスミッション30を介して主駆動輪1L、1Rで出力した場合の第1駆動力と、エンジン2での発生トルクにより発電機7で発電を行い、発電された電力によりモータを駆動させたときの発生トルクを従駆動輪3L、3Rで出力した場合の第2駆動力とのうち、どちらの駆動力が大きくなるかを判断する判断部と、判断部による判断結果に基づいて駆動力調整を行う駆動制御部とを備えている。
(もっと読む)
4輪駆動車両のクラッチ装置及び4輪駆動車両の駆動力配分方法

【課題】4輪駆動車両の車輪のスリップに起因して発生するジャダを適確に抑制するとともに、前輪及び後輪がスリップするような状況下においても車両を効果的に加速させることができる4輪駆動車両のクラッチ装置及び4輪駆動車両の駆動力配分を提供する。
【解決手段】エンジン2と後輪12rとの間に設けられプロペラシャフト5とピニオンシャフト7との差動回転を抑制可能なトルクカップリング6(電磁クラッチ15)と、走行状態に基づいてトルク伝達容量(電磁クラッチ15の摩擦係合力)を制御するECU21とを備えた。そして、ECU21は、トルク伝達容量が「0」より大きい4輪駆動状態での加速時に、前後車輪速差ΔWがゼロを挟んで振動し、その振幅が前輪12fの前輪車輪速Vfと後輪12rの後輪車輪速Vrとの大小関係が反転する前後で拡大した場合に、目標トルクを低減するようにした。
(もっと読む)
4輪駆動車両の制御方法
【課題】 直結/増速の切り替えを的確に制御可能な増速機構を有する4輪駆動車両の制御方法を提供することである。
【解決手段】 駆動源と常に連結された主駆動輪としての前輪と、駆動トルク量を調整可能な従駆動輪としての後輪と、後輪側を前輪側に対して直結状態と増速状態の間で切り替え可能な増速機構を有し、走行状態に応じて該増速機構を増速状態に切り替え制御可能な4輪駆動車両の制御方法であって、第1車速以下の低速走行を行ったときには、第1車速から第1車速より大きな第2車速までは増速機構を増速状態に切り替え制御することを禁止し、車速が第2車速より大きく、且つ直進走行と判定された時は増速機構を増速状態に切り替え制御することを許可する。
(もっと読む)
電動モータ式四輪駆動車両の主動力源制御装置
【課題】路面摩擦係数が最大となるような態様で必要モータトルクを発生させることができる、電動モータ式四輪駆動車両のエンジン制御技術を提案する。
【解決手段】S11で、必要モータトルクを発生させるのに要求される必要最小限の必要モータトルク発生用前輪速を演算する(S11)。S12では、路面摩擦係数μが最大となる(前輪グリップ力が最大となる)前輪の理想スリップ率を実現するのに必要な目標前輪スリップ量ΔVwを演算し、このΔVwを現在の車体速VSPに加算して路面摩擦係数最大用前輪速を求める。S13では、必要モータトルク発生用前輪速および路面摩擦係数最大用前輪速のうち、大きい方を目標前輪速とする。S14では、前輪の実車輪速がこの目標前輪速に追従するようエンジンを出力制御する。
(もっと読む)
四輪駆動ハイブリッド車両用動力伝達装置の制御装置
【課題】四輪駆動ハイブリッド車両用動力伝達装置の制御装置において、第2電動機MG2の発電制御に伴って発生する負トルクを防止することができる四輪駆動ハイブリッド車両用動力伝達装置の制御装置を提供する
【解決手段】駆動力制御手段72は、第1電動機MG1および第2電動機MG2によって発電制御が実施されている状況下において、後輪40の後輪出力トルクTprが正トルクとなるように制御するため、前輪34のトルクの向きと後輪40のトルクの向きとが異なることが防止される。したがって、前輪34および後輪40のトルクの向きが同方向となり、走行時の違和感を好適に防止することができる。
(もっと読む)
トラクタの旋回制御装置
【課題】枕地における斜め方向への耕耘土の跳ね飛ばしを少なくして、耕耘面の仕上がりを良好に保持することができると共に、旋回時の車速の大小に拘わらず前輪倍速装置が作動するまでに機体が走行する距離を一定とし、最適な旋回タイミングを見つけ出し易くする。
【解決手段】前輪Zが操舵されると、作業機21を上昇させると共に、前輪Zを倍速駆動させて機体の旋回を行うトラクタTの制御装置22において、前輪Zが所定の操舵角以上に操舵されたことを検出するのに伴って作業機21を上昇させる制御を開始すると共に、この上昇制御が開始された後、機体が設定距離以上に走行したことを検出するのに伴って前輪Zの倍速駆動を開始する。
(もっと読む)
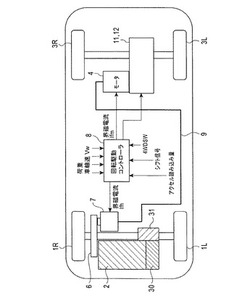
四輪駆動車の電動機トルク制御装置および方法
【課題】 制御ハンチングの抑制と主駆動輪のグリップ力の維持とを両立できる四輪駆動車の電動機トルク制御装置および方法を提供する。
【解決手段】 4WDコントローラ8は、目標モータトルクTm*を前輪1L,1Rと後輪3L,3Rとの車輪速差ΔVと車速VSPとに基づいて設定し、車速VSPに応じた目標モータトルクを、車速VSPが高いほど増加させ、目標モータトルクTm*に応じてモータ4の出力トルクを制御する。
(もっと読む)
車両駆動制御装置
【課題】過電流保護を図ることが可能な車両駆動制御装置を提供する。
【解決手段】車両駆動制御装置は、主駆動輪1L、1Rを駆動するエンジン2と、エンジン2の駆動によって発電する発電機7と、発電機7による発電電力で従駆動輪3L、3Rを駆動するACモータ4と、ACモータ4と従駆動輪3L、3Rとを接続状態をクラッチコイルに流れる電流によって制御することが可能なクラッチ11とを備えている。また、車両駆動制御装置はECU8を備え、ECU8は、ACモータ4により駆動される従駆動輪3L、3Rの回転数が所定時間以内に所定値以上減少したことを判断し、回転数が所定時間以内に所定値以上減少したと判断した場合に、クラッチ11のクラッチコイルに流れている電流値を小さくする。
(もっと読む)
油圧駆動車両
【課題】第一及び第二フレームにそれぞれ支持され且つ可変容積型第一油圧モータ及び固定容積型第二油圧モータによってそれぞれ駆動される第一及び第二車輪間に旋回半径差が生じるアーティキュレート型油圧駆動車両において、第一油圧モータに特別な構造を備えることなく、旋回半径差を補償する。
【解決手段】 第二フレームにカム面を有するカム押動部材が相対移動不能に設けられ、第一フレームに枢支軸回り相対移動不能且つ第1方向相対移動可能にカム従動部材が設けられる。カム面は、第一及び第二フレームの枢支軸回りの揺動量に応じた量だけカム従動部材が第1方向に移動するように構成され、カム従動部材の第1方向の動きを利用して第一油圧モータの容積量を増減する。
(もっと読む)
駆動力配分装置及び駆動力配分装置の制御方法
【課題】正確に温度推定して駆動力伝達部材が過熱することを防止できる駆動力配分装置及び駆動力配分装置の制御方法を提供する。
【解決手段】温度推定部37は、エンジンの温度を検出する水温センサにて検出されたエンジン水温T_engに基づいて、エンジンからの熱伝達量W_engを演算する熱伝達量演算部42と、熱伝達量W_engを考慮してトランスファ油温T_ptuを演算する温度演算部48とを備えた。そして、ECUは、温度推定部37で推定(演算)したトランスファ油温T_ptuが所定温度以上である場合には、トランスファ油温T_ptuが所定温度未満の場合よりも、指令トルクT*の目標値を小さく補正し、補正指令トルクに応じた駆動電流をトルクカップリングに供給するようした。
(もっと読む)
駆動力制御装置
【課題】駆動力配分を複数のモードで制御自在な駆動力配分制御装置において、ドライバの意図しないモード切替を抑制し、操作性、扱い易さを向上させる。
【解決手段】センタデファレンシャル差動制限制御部50において、モード設定部54は、基本的には、モード切換スイッチ35からの信号に従って、4WDオートモード制御演算部52か、或いは、4WDマニュアルモード制御演算部53に対して演算値の出力実行命令を出力するが、エンジン停止後は、設定されているモードを予め設定した初期モード(4WDオートモード)に自動的に変更するモードリセット機能を有する。この際、エンジン1が停止してから予め設定した時間が経過するまでは、モードリセットの変更を禁止する。
(もっと読む)
車両制御装置
【課題】車両の直進性の向上
【解決手段】個別に設けた駆動源(内燃機関10、第1,第2及び第3のモータ/ジェネレータ31,32,33)によって前輪Wfl,Wfrと後輪Wrl,Wrrを各々独立して駆動させる車両の車両制御装置(メインECU71、機関ECU72、モータ/ジェネレータECU73)において、前輪Wfl,Wfrの車輪速度と後輪Wrl,Wrrの車輪速度に差がある場合、前輪Wfl,Wfr又は後輪Wrl,Wrrの内の何れか一方の車輪速度を他方の車輪速度に合わせる車輪速度調整手段を設けること。
(もっと読む)
作業車両の走行装置
【課題】真に4輪駆動状態とする必要がある場合にのみ2輪駆動状態から4輪駆動状態に切り換わり、車輪の摩耗を促進することなく、車両の耐久性や走行時の安全性を向上させた作業車両の変速装置の提供である。
【解決手段】4WD・2WD切換スイッチにより駆動状態自動切換モードとしA、且つ2輪駆動状態で走行中であってC、後輪と前輪の回転数比がT、メモリに予め記憶された回転数比の基準値から外れた場合にG、該基準値から外れた回転数比が所定の要件を満たすときは新たな基準値として更新してメモリに記憶させる処理を行う更新記憶機能部を備えW、後輪と前輪の回転数比がメモリに更新、記憶された新たな基準値から外れるとK、2輪駆動状態から4輪駆動状態へ切換える制御装置を設けることで、常時予め記憶された基準値から外れると切換わるのではなく、一定の歯止めを掛けて不必要な切換を防止できる。
(もっと読む)
車両被牽引検出装置
【課題】前後輪駆動車両が牽引されたことを好適に検出できる車両被牽引検出装置を提供する。
【解決手段】プロペラシャフト24及び後輪車軸30それぞれに備えられ、それらの回転により発電を行う1対の発電装置82と、その1対の発電装置82による発電量の差に基づいてプロペラシャフト24及び後輪車軸30の差動回転を検出する検出回路84とを、備えたものであることから、前輪22又は後輪32の持ち上げ牽引走行が行われた場合におけるプロペラシャフト24及び後輪車軸30の差動回転、延いては前輪22及び後輪32の差動回転を好適に検出することができる。すなわち、前後輪駆動車両が牽引されたことを好適に検出できる車両被牽引検出装置80を提供することができる。
(もっと読む)
車両用駆動制御装置および車両用駆動制御装置の制御方法
【課題】主駆動輪の駆動トルクを超える余剰トルクがない場合にあっても、車両の加速性能を向上可能とすること。
【解決手段】車両総駆動トルクが不足していないと判定された場合、つまり、通常時には、トルクコンバータ7aをロックアップし、車両総駆動トルクが不足していると判定された場合には、トルクコンバータ7aのロックアップを解除するようにした。そのため、車両総駆動トルクが不足している場合には、トルクコンバータ7aのロックアップを解除することで、トルクコンバータ7aによってエンジン1の出力を増幅し、前輪9FL、9FRの駆動トルクを増大することができる。
(もっと読む)
駆動力配分装置
【課題】実用上不必要なほど大きなトルクが従駆動輪へ伝達されることのないよう駆動力配分装置を構成し、従駆動輪駆動系を不必要に高強度に造る必要がないようにする。
【解決手段】後輪へトルクを伝達する入力軸12に第1ローラ31を一体成形し、前輪へトルクを向かわせる出力軸13に第2ローラ32を一体成形する。ローラ31,32が相互に径方向へ押圧接触されるよう、ローラ軸間距離L1を、ローラ31,32の半径の和値よりも小さくして、軸12から後輪へのトルクの一部を、ローラ31,32を経て軸13より前輪へ向かわせる。ローラ間径方向押圧力を、この押圧力で決まる前輪トルク配分比最大状態での最大配分時最大ローラ伝達トルクが、前輪トルク配分比最大状態で最大入力が入力軸12へ伝達された時の前輪最大配分トルクよりも小さくなるよう定めるべくローラ軸間距離L1を決定する。
(もっと読む)
駆動方式切換装置
【課題】2輪駆動状態、4輪駆動状態及びデフロック状態の切換操作を容易に行わせるとともに、2輪駆動状態から直にデフロック状態に誤操作してしまうのを確実に回避して安全性を維持することができる駆動方式切換装置を提供する。
【解決手段】操作ノブ4と、該操作ノブに形成された第1操作面4a及び第2操作面4bと、第1操作面4a及び第2操作面4bの間に形成され、非押圧操作時には第2位置から第3位置への操作ノブの動作を規制するとともに、押圧操作時には第2位置から第3位置への動作を許容する操作ボタン5とを具備し、車両の駆動方式を4輪駆動又は2輪駆動に切換操作可能、且つ、デフロックをオン又はオフに操作可能な駆動方式切換装置において、第1操作面4aは、操作ボタン5の側面を覆う高さまで延設されたものである。
(もっと読む)
車両のタックイン防止制御装置
【課題】たとえトラクション制御によりスロットル弁が閉側に制御されることがあっても、タックイン現象を的確に防止して違和感を与えることなく自然な制御を行う。
【解決手段】駆動力配分制御部40では、第1のトランスファトルク演算部43で入力トルク感応トランスファトルクを演算し、第2のトランスファトルク演算部44で舵角/ヨーレート感応トランスファトルクを演算し、第3のトランスファトルク演算部45でタックイン防止トランスファトルクを演算する。この第3のトランスファトルク演算部45では、高速旋回時、アクセル開度が大きく閉じられて今回のアクセル開度が小さくなった場合のみならず、トラクション制御部20によるトルクダウン量が設定値より大きい場合においてもタックイン防止制御を実行する。また、横すべり防止制御部30とABS31の少なくとも一方が作動している場合には、タックイン防止制御を禁止する。
(もっと読む)
車両の挙動制御装置
【課題】制御量に対する制御指標の不感帯を適正なものとし、車両の挙動制御の向上を図った車両の挙動制御装置を提供する。
【解決手段】目標挙動設定手段により設定された目標挙動γtと挙動検出手段により検出された実挙動γrとの偏差の相関値Δγが制御指標とされ、挙動制御手段により挙動調整機構は該制御指標に応じて求めた制御量TR/Dに基づき制御されるが、該挙動制御手段は、制御指標の0値近傍に不感帯を有しており、該不感帯の所定幅|γDZ|を、車速VBが第1所定値V1未満の低車速域では該第1所定値V1以上第2所定値V2未満の中車速域よりも広く設定するとともに、車速VBが第2所定値V2以上の高車速域でも上記中車速域よりも広く設定する。
(もっと読む)
ハイブリッド車両の駆動力伝達装置
【課題】エンジンの駆動による走行時に2方向クラッチが係合状態にスイッチするのを防止することができるようにしたハイブリッド車両の駆動力伝達装置を提供することである。
【解決手段】エンジン13を駆動源として回転駆動される前輪11と、減速機付き電動モータ16を駆動源として回転駆動される後輪12とを備え、上記電動モータ16における減速機17の出力軸18から後輪12に至るトルク伝達経路に機械式の2方向クラッチ19を組込んでエンジン13の駆動による車両の走行時に後輪12から出力軸18に回転トルクが伝達されるのを防止する。減速機17の出力軸18を制動する電磁クラッチ50を設け、電動モータ16の回転停止時に、その電磁クラッチ50により出力軸18を制動して、エンジン13の駆動による車両の走行時に2方向クラッチ19の外輪22が振動等で回転して2方向クラッチが誤作動するのを防止する。
(もっと読む)
41 - 60 / 123
[ Back to top ]