
Fターム[3D232CC48]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 低コスト化・システムの小型化 (482)
Fターム[3D232CC48]に分類される特許
1 - 20 / 482
パワーステアリング装置
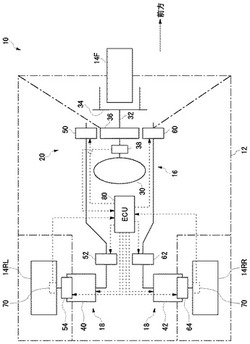
【課題】転舵輪と駆動輪とが同一か否かにかかわらず、車輪を駆動するモータの駆動力を用いてステアリングホイールの操舵をアシストする。
【解決手段】パワーステアリング装置20において、左モータ40左輪を駆動する。右モータ42は、右輪を駆動する。左転舵クラッチ52は、左モータ40と操舵軸32との間に介在する。右転舵クラッチ62は、右モータ42と操舵軸32との間に介在する。ECU80は、車速が所定速度以下のときに、右旋回方向にステアリングホイール30が操舵されたときは右転舵クラッチ62をオンにして右モータ42と操舵軸32とを接続させ、左旋回方向にステアリングホイール30が操舵されたときは左転舵クラッチ52をオンにして左モータ40と操舵軸32とを接続させる。
(もっと読む)
車両用操舵装置

【課題】簡単な構造で安価に操舵反力を発生できる車両用操舵装置を提供すること。
【解決手段】例えば左操舵される操舵部材2によって伝達機構14を介して第1回転方向X1に駆動された空気圧縮機5が、第1ポート51を吸込口とし、第2ポート52を吐出口とする。空気供給口24からの空気が、吸込口となっている第1ポート51に供給される。吐出口になっている第2ポート52から吐出された圧縮空気は、第2可変絞り20、第2逆止弁18、高圧部16aの分岐部29、上流側還流路30、方向制御弁28および第1下流側還流路32を介して、吸込口となっている第1ポート51に還流される。操舵部材2に、空気圧縮機5の駆動の反力による操舵反力が付与される。
(もっと読む)
制御装置およびフォークリフト
【課題】装置構成の大型化およびコスト増加を抑えつつ、意図しない旋回を防止できるようにする。
【解決手段】検出ヨーレートが想定ヨーレートの所定範囲外となるような場合に(s160)、検出ヨーレートの作用による本体2の旋回を相殺する方向へ駆動輪53を操舵させるべく操舵トルクを付与しているため(s180)、これにより検出ヨーレートが想定ヨーレートに近い値となる結果、意図しない旋回を防止することができる。このとき、検出ヨーレートを、実際のステアリング51の操作に応じたヨーレートである想定ヨーレートと所定範囲以内に近似させることにより、効果的に意図しない旋回が防止される。
(もっと読む)
電動パワーステアリング装置
【課題】二重制御系統を備えた電動パワーステアリング装置において、サブマイクロコンピュータの実装を必要としない電動パワーステアリング装置を提供する。
【解決手段】制御装置5A,5Bを2系統有し、各制御装置5A,5Bは、相手系統の故障を推定する故障推定部56,66を備え、故障推定部56,66は、電動モータ1a,1bの出力値が目標指令値に収束する時間Teを監視し、この収束時間Teが基準時間γよりも長い場合に、他系の制御装置の故障を推定するものであり、他系の制御装置の故障を推定した正常側の制御装置は、正常側の制御装置の制御周期T0を短くしかつ制御ゲインK0を上げる制御を行う。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】d軸電流指令値設定部31、d軸電流偏差演算部32、ロータ角度制御部33、ロータ角度演算部34および速度演算部35から構成されるロータ角度推定手段によって、ロータ角度θが推定される。q軸電流指令値設定部21は、トルクセンサ1によって検出される操舵トルクおよび車速センサ2によって検出される車速に応じたモータトルクをモータ5から発生させるためのq軸電流指令値Iq*を設定する。d軸電流指令値設定部24は、d軸電流指令値Id*を設定する。q軸電流指令値Iq*と、d軸電流指令値Id*と、q軸電流検出値Iqと、d軸電流検出値Idと、推定されたロータ角度θとに基づいて、モータ5に供給される電流が制御される。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】1シャント式でモータの電流検出を行い、作動音が少なく、トルクリップルを減少させたモータ制御装置及びそれを装填した電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいてインバータでモータを駆動制御すると共に、1シャント式電流検出器で前記モータの各相モータ電流を検出するようになっているモータ制御装置において、インバータの電源電圧、各相デューティ指令値、モータの逆起電圧情報、電流検出器で検出された各相モータ電流、PWMの配置情報及びモータの電気的特性式より電流検出補正値を算出する電流検出補正部を具備し、電流検出補正値により電流検出器で検出された各相モータ電流をモータ平均電流に補正してモータを駆動制御する。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 トー角制御用モータの小型化を図り消費電力の増加を抑え、また車両の停止時に、トー角を制御するとき運転者に違和感を与えないステアバイワイヤ式操舵装置を提供する。
【解決手段】 ステアリング制御手段8aは、車両の停車時に、トー角を変える指令信号を出力する場合にトー角を変える回転分割軸6B側の操舵輪3を、この操舵輪3が接地する地面に対して方向が変化しないように、トー角調整用モータ13と転舵用モータ11とを協調して制御する協調制御部8adを有する。
(もっと読む)
パワーステアリング装置
【課題】簡単な構造でシミーを効率的に抑制することができるパワーステアリング装置を提供する。
【解決手段】パワーアシストバルブ8とパワーシリンダ2Pとを連通した2本のシリンダ配管2C1、2C2の途中に2連式開閉バルブ10を設ける。2連式開閉バルブ10は、第1シリンダ配管2C1と第2シリンダ配管2C2とに跨がって取り付け、両シリンダ配管2C1、2C2を同時に開閉する簡単な構造となる。ハンドル3が中立状態で制御油圧が発生されない状態での高速走行時に、第1、第2シリンダ配管2C1、2C2を二連式開閉バルブ10で遮断し、パワーシリンダ2Pの第1、第2油室2P2、2P3内の作動油を封じ込めてラック21をロック状態とする。これにより、操舵輪6に入力された路面振動がハンドル3に伝わってシミーとなるのを抑える。
(もっと読む)
操舵トルク検出装置、操舵トルク検出方法及び電動パワーステアリング装置
【課題】トルクセンサを用いずに操舵トルクを検出することができる操舵トルク検出装置及び操舵トルク検出方法、並びにトルクセンサを複数設けることなく2重系を構築することができる電動パワーステアリング装置を提供する。
【解決手段】モータ回転角センサ13の検出信号S1の周期と操舵角センサ18の検出信号S2との周期をそれぞれカウントし、それぞれの絶対角度を算出する。そして、これらの絶対角度の相対角度から操舵トルクT0を算出する。算出した操舵トルクT0とトルク検出値Tiとを比較することで、トルクセンサ3の異常を検出し、トルクセンサ3の正常時にはトルク検出値Tiを用いて操舵補助制御を行い、トルクセンサ3の異常発生時には、トルク検出値Tiに代えて操舵トルクT0を用いて操舵補助制御を行う。
(もっと読む)
操舵絶対角検出装置および車両用操舵装置
【課題】検出が容易な操舵絶対角検出装置を提供する。
【解決手段】操舵軸の回転角区間(例えば1回転360°毎)にそれぞれ応じたラック軸8の軸方向区間を設けた。軸方向区間毎に仕様の異なる複数の被検出面(平坦面341〜344)を、ラック軸8の表面8bに設けた。距離検出器33が、何れの被検出面(平坦面341〜344)を検出するかによって、ラック軸8の軸方向区間(操舵軸の回転角区間に相当)を特定する。特定された回転角区間に対応する回転角基準値に、トルクセンサの第1レゾルバにより検出された回転角値を加算して、操舵絶対角を求める。
(もっと読む)
電動パワーステアリング装置
【課題】操舵トルクが零付近である場合に電動モータ電流が流れない不感帯を、車速に応じて設けることができ、しかも構成が簡単でコストが低い電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、操舵トルクセンサ2によって検出される操舵トルクを表すアナログトルク信号Thと、車速を表すアナログ車速信号Vとを入力としてアナログ信号処理をすることにより、操舵トルクに応じて車速が大きいほど広い不感帯領域を有し、車速が小さいほど狭い不感帯領域を有するアナログ信号Wを出力する非線形回路56を有する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することのできるモータ制御装置を提供することにある。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルクとの間のトルク偏差Δτに基づいてγ軸電流増減値を演算し、当該γ軸電流増減値を積算することによりγ軸電流指令値Iγ*を演算する。そして、そのγ軸電流指令値Iγ*には、下限値が設定される。
(もっと読む)
電動パワーステアリング装置
【課題】端当て回数を計数して管理すると共に、端当て回数に応じた電流制限値を算出してアシストを制限することにより、構成部品の軽量、小型化を図った電動パワーステアリング装置を提供する。
【解決手段】操舵トルク及び操舵トルクを微分した微分操舵トルクに基づいて端当てを検出し、端当て検出信号を出力する端当て検出手段と、端当て検出手段で検出された端当て回数1を計数する計数手段と、通算端当て回数を記憶して保持している記憶手段と、計数手段からの端当て回数1と記憶手段からの通算端当て回数とを加算した端当て回数2に対応した電流制限値を算出する電流制限値算出手段とを具備し、電流制限値算出手段で算出された電流制限値に基づいて電流指令値を制限する。
(もっと読む)
電動パワーステアリング装置
【課題】製造工数を低減することができる技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、ステアリングホイールに連結される第1の回転軸と、第1の回転軸とトーションバーを介して連結される第2の回転軸と、第1の回転軸と第2の回転軸との相対回転角度を検出する磁気センサと、ステアリングホイールに操舵トルクが付与されていないときの磁気センサの出力値である基準値を記憶する記憶部とを有し、記憶部に記憶された基準値と磁気センサの出力値とに基づいて操舵トルクを検出するトルク検出装置と、外部装置と通信を行うために外部装置のコネクタと接続される接続コネクタ16を有するとともに、トルク検出装置が検出した操舵トルクに基づいて電動モータの駆動を制御する制御ユニット10と、を備え、トルク検出装置の記憶部に基準値を記憶させる処理を、制御ユニット10の接続コネクタ16を介して行うことを可能にする。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリングを備えた車両において、前輪の左右車輪速差、または後輪の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に、所定時間の間低車輪速側に操舵補助力を付加する。
(もっと読む)
電動パワーステアリング装置
【課題】システムを大型化することなく、すえ切り時において操舵補助力が不足しないコンパクトな構造の電動パワーステアリング装置を提供する。
【解決手段】操舵系に連結され、前記操舵系に減速機を介して操舵補助トルクを発生するモータ18を備え、操舵系の操舵トルクや車速に基づき前記モータを制御し、操舵アシストトルクを発生する電動パワーステアリング装置において、前記減速機を減速比の異なる第1減速機18b、20と第2変速機18c、21で構成し、この第1、第2減速機18b、20、18c、21を切替える切替手段13を備えた。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリング(10)を備えた車両(1)において、前輪(2L,2R)の左右車輪速差、または後輪(4L,4R)の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に(S3)、所定時間の間(S9)低車輪速側に操舵補助力を付加する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】モータ抵抗推定部27は、たとえば、加算角リミッタ24から出力される加算角αの絶対値が所定の閾値B以下であるときに、モータ抵抗Rを推定する。誘起電圧推定部28は、モータ抵抗推定部27によって推定されたモータ抵抗Rを用いて、モータ3の回転によって生じる誘起電圧を推定する。回転角推定部29は、誘起電圧推定部28によって推定された誘起電圧に基づいて、ロータ50の回転角の推定値θEを演算する。ロータ角変位演算部30は、演算周期間の推定回転角θEの変化量を求めることによって、演算周期当たりのロータ50の角変位Δθを求める。加算角ガード41は、必要時において、ロータ角変位演算部30によって求められるロータ角変位Δθに基づいて加算角αを補正する。
(もっと読む)
車両用操舵装置および車両用操舵装置の製造方法
【課題】ハウジング内で転舵軸の移動量を規制することができ、しかも小型で強度に優れた車両用操舵装置を提供する。
【解決手段】電動モータ21,22の回転動力をボールねじ機構23を介して転舵軸6の軸方向X1の移動に変換する、ステアバイワイヤ式の車両用操舵装置1である。転舵軸6の移動方向に応じて、転舵軸6の中間部のねじ軸32の両端の当接部45,46が、ロータ26内を挿通して、対応するストッパ47,48に当接することにより、転舵軸6の移動量を規制する。ストッパ47,48をハウジングとは別部材の強度の強い材料で構成する。
(もっと読む)
モータ制御装置、および、これを用いた電動パワーステアリング装置
【課題】回転角検出手段を用いることなくモータを駆動し、このときのモータの巻線の異常を確実に検出できるモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】マイコン30は、第1駆動手段として機能し、トルクセンサ82により検出した操舵トルクに基づき加算角を演算し、当該演算により導出した加算角に基づきモータ10を制御する。マイコン30は、演算により導出した加算角に基づきモータ10を制御しているとき、第1異常検出手段として機能し、前記加算角、電流センサ81により検出した電流、および、インバータ部20に供給される第1制御信号(PWM制御信号)の値に基づき、モータ10の巻線の異常を検出する。
(もっと読む)
1 - 20 / 482
[ Back to top ]