
Fターム[3D232DA64]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 電動機状態量 (3,403) | 電流 (1,422)
Fターム[3D232DA64]に分類される特許
61 - 80 / 1,422
モータ制御装置およびそれを用いた電動パワーステアリング装置
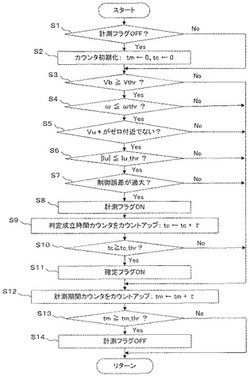
【課題】複数相のモータを制御するモータ制御装置において、対象とする相に開放状態の故障が発生した場合に、いずれの相に開放状態の故障が発生したか否かを、迅速かつ正確に検知するモータ制御装置およびそれを用いた電動パワーステアリング装置を得る。
【解決手段】電源電圧Vbが所定電圧Vthr以上、かつ、モータ回転速度ωが所定速度ωthr以下、かつ、対象とするx相電圧指令Vx*がゼロ付近でなく、かつ、対象とするx相の電流Ixが所定電流Iu_thr以下、かつ、制御誤差が所定誤差以上である状態が所定時間以上検出された場合に、対象とするx相に開放状態の故障が発生したと判定する。
(もっと読む)
車両用操舵装置

【課題】ステアリングギア比を車速に応じて変化させる場合であっても、ドライバに対し、車速に関係なく適切な操舵量をイメージさせる。
【解決手段】車速Vに基づきステアリングギア比Gおよび転舵角δを算出し(ステップS1、S2)、さらに車速Vおよび操舵角θに応じた操舵反力成分T(V,θ)と、フリクション成分Tfと、操舵角速度θ′に応じた操舵反力成分T(θ′)との和から操舵反力Tを演算し(ステップS3〜S8)、操舵反力成分T(V,θ)を、車速Vが大きいときほど小さな値となる特性とする。車速Vが大きいときほど操舵反力Tは抑制されるため、ステアリングギア比を車速に応じてステアリングギア比が大きくなる特性とした場合でも、ステアリングホイール1に付与される操舵反力は車速に関係なくほぼ同等程度となる。そのためドライバは操舵量をイメージしやすくなり、的確な操舵を行うことができる。
(もっと読む)
電動パワーステアリング装置および車両用制御装置
【課題】急発進する必要がある場合により早く発進できる状態とすることができる技術を提供する。
【解決手段】操舵トルクを検出するトルクセンサと、電動モータ110と、ステアリングホイールの操作角度を検出する操舵角センサと、車両に設けられ予め定められた停止条件が成立した場合にエンジンを自動的に停止させるとともにエンジンが停止している状態で予め定められた始動条件が成立した場合にエンジンを自動的に再始動させるエンジン制御装置6に対して、予め定められた停止条件が成立した場合であってもエンジンの停止を禁止する旨を要求し、および/または予め定められた始動条件が成立していなくてもエンジンの再始動を要求するモータ制御部40と、を備え、モータ制御部40は、操舵トルクが基準トルクを超えている場合、あるいは操作角度が基準角度を超えている場合には、エンジンの停止を禁止する旨を要求、またはエンジンの再始動を要求する。
(もっと読む)
電動パワーステアリング装置
【課題】モータ回転角センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】モータ回転角センサ(24)の異常が検出された場合には、モータ回転角にかえて、ステアリングシャフト(3)の回転角で、モータ(12)を駆動制御する。更に、前記ステアリングシャフト(3)の回転角は、モータ(12)の回転角に対して、トーションバー(17)の捻れ分だけ位相が進んでいるので、トーションバー(17)の捻れ分だけステアリングシャフト(3)の回転角の位相を遅らせる補正を行なう。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】モータの駆動時においても、相開放スイッチのオープン故障を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】異常検出部は、モータ21と駆動回路32との間で一方向への通電が可能、且つモータ21が高速回転していない状態で、判定対象となる特定相の相誘起電圧値が継続して異常判定閾値以下となった場合に、該特定相のリレーFETにオープン故障が発生したと判定するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】開閉手段の作動音をユーザに聞こえ難くすることができる技術を提供する。
【解決手段】ドアを有する乗り物の進行方向を変えるためのステアリングホイールの操作に対するアシスト力を付与する電動モータと、電動モータに流れる電流を通電/遮断するべく電動モータに流れる電流の経路を開閉するリレーと、リレーの作動を制御するリレー作動部と、を備え、リレー作動部は、乗り物のドアの開閉音と重なるように開閉手段を作動させる。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障が発生したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】短絡故障したFETがローサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最大値を検出し、検出された各相の相電圧最大値を比較することにより、短絡故障相を特定する。一方、短絡故障したFETがハイサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最小値を検出し、検出された各相の相電圧最小値を比較することにより、短絡故障相を特定する。
(もっと読む)
電動パワーステアリング装置
【課題】
電動パワーステアリング装置に異常が発生して操舵補助が停止された場合に、ディファレンシャルギアをアクティブ制御することによって、運転者の操舵感に違和感を与えることなく代替操舵補助を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】
電動パワーステアリング装置の異常を検出する異常検出部と、左右の車輪の回転数差を調整するためのディファレンシャルギアとを設け、異常検出部が電動パワーステアリング装置の異常を検出したときに、ディファレンシャルギアが車両状態に基づいて代替操舵補助を行う。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(65)を有する。そして、モータ回転角速度を更に微分してモータ回転角加速度を演算するモータ回転角加速度演算手段(61)と、モータ回転角加速度演算手段(61)により演算された値により、ローパスフィルタ(65)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(65)に基づいて出力されるモータ回転角速度に基づき、モータの速度起電力により発生する電流を相殺するように、モータ電圧指令値を定める非干渉制御を実行する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの回転角速度に基づいて精確に電動モータを制御することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、モータ方程式に基づいて電動モータの回転角速度を算出する。そして、電動モータの運動状態に基づいてモータ方程式の近似式を算出し、この近似式に基づいてモータ方程式の逆起電圧定数を更新する。電動モータのトルクが付与される駆動体の動作に応じて信号を出力するセンサと、センサの出力信号に基づいて電動モータの回転角速度の演算値を算出する演算器とを備え、電動モータの電流の測定値が所定範囲内のとき、電動モータの電圧の測定値および前記回転角速度の演算値を記憶し、記憶した電圧の測定値の数または回転角速度の演算値の数が所定数以上のとき、近似式を算出する。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】低温から高温の環境化においても常に操舵性能が良好な電動パワーステアリング装置の制御装置を提供する。
【解決手段】電流指令値に基づいてデッドタイム特性値を演算するデッドタイム特性部211と、操舵状態判定部210と、デッドタイム特性値のゲインを可変するゲイン部212と、操舵状態判定部の判定に従って極性判定方法を切替えられると共に、モータのモデル電流値に基づいて極性を判定する極性判定部213と、インバータの温度を検出する温度センサと、温度に対応したデッドタイム温度補正値を算出するデッドタイム温度補正値算出部215と、極性付きデッドタイム補償値に対してデッドタイム温度補正値を演算処理してデッドタイム補償値を出力する演算処理部216とを備え、デッドタイム補償値を電圧指令値に付与することにより、デッドタイムを補償して温度に応じてデッドバンドを最適化する。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角が大きな範囲は、転舵速度に基づく操舵制御を実行することにより運転者の操舵負担を減らす。
【解決手段】タイヤを転舵させる転舵駆動機構と、操舵部材の操舵角を検出する操舵角センサと、操舵角が所定の切替角αを越える高角領域にあるか否かを判定し、操舵角が高角領域にあるとき操舵角センサで検出した操舵角の増減を判定する切り込み/切り戻し判定処理部(B3)と、操舵角が高角領域で増加傾向にあるとき、操舵角が高角領域にある時間に応じてタイヤの転舵角が増大するように転舵駆動機構を制御し、操舵角が高角領域で減少傾向にあるとき、操舵角が高角領域にある時間に応じてタイヤの転舵角が減少するように転舵駆動機構を制御するための目標転舵角を算出する目標転舵角算出処理部(B4)とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクセンサの異常が検出された場合には、操舵トルクセンサに替えて、横G及びヨーレートから演算される軸力に基づくアシスト力目標値に相当するモータトルクを発生させ、駆動電力の供給を実行することによりアシスト制御を継続する。その結果、横G及びヨーレートから演算される軸力に基づくアシスト力目標値を発生させているので、路面状況の変化等を運転者に十分伝えることができ、操舵フィーリングの向上が図れる。
(もっと読む)
電動パワーステアリング装置
【課題】モータの回転角速度に基づいて精確にモータを制御することのできる電動パワーステアリング装置を提供する。
【解決手段】第1の時刻t1のとき操舵角速度ωsが第1条件〜第3条件を満たす。このとき、第1逆起電圧定数Ke1が算出される。第2の時刻t2のとき操舵角速度ωsが第1条件〜第3条件を満たす。このとき、第2推定誘起電圧EX2が算出される。操舵角速度ωsと推定誘起電圧EXとに基づいて逆起電圧定数Keを算出する。そして、モータ電流Imとモータ電圧Vmと逆起電圧定数Keとモータ抵抗Rmとに基づいてモータの回転角速度を推定回転角速度ωmaとして算出する。
(もっと読む)
トルクセンサ及びこれを備えた電動パワーステアリング装置
【課題】検出コイル、非磁性の円筒部材、センサシャフト部を使用してトルク検出を行う際に、検出コイルへの磁束量を増加させて検出精度を向上させることができるトルクセンサ及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】一対の検出コイル13a,13bの内周面側に所定間隔を保って対向して入力軸及び出力軸の一方に連結された非磁性の円筒部材12を配置し、該円筒部材12の内周面側に、軸方向の凸条11aを円周方向に所定間隔で形成し、前記入力軸及び出力軸の他方に連結されたセンサシャフト部11を配置し、前記円筒部材12は、前記一対の検出コイルに個別に対向し、円周方向に位置を異ならせて形成された前記一対の検出コイルで互い逆方向にインピーダンスを変化させる一対の磁束透過用窓12a,12bを形成し、該一対の磁束透過用窓の軸方向両端部に空気より透磁率の高い磁路部材17を配置した。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】不必要な据え切り操作を極力させないように、意図的な据え切り以外の動作を抑制することにより、車両において無駄な電力消費を抑制する。
【解決手段】操舵部材と、車速を検出する車速検出部と、検出された車速が規定値よりも小さいかどうかを判定する車速判定部と、操舵部材に操舵反力を付与する反力モータと、転舵輪を転舵させる転舵駆動機構と、転舵駆動機構を駆動する転舵モータとを備える。車速判定部によって、検出された車速が規定値よりも小さいと判定された場合に、操舵部材の操舵角の増加に伴って転舵モータの通電を制限するとともに、操舵反力が急激に増大するように反力モータを制御する。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクセンサの異常が検出された場合には、操舵トルクセンサに替えて、横Gに基づくアシスト力目標値に相当するモータトルクを発生させ、駆動電力の供給を実行することによりアシスト制御を継続する。その結果、横Gに基づくアシスト力目標値を発生させているので、路面状況の変化等を運転者に十分伝えることができ、操舵フィーリングの向上が図れる。
(もっと読む)
モータ駆動装置
【課題】 インバータおよびモータリレーを半導体スイッチング素子で構成するモータ駆動装置の体格を小型にする。
【解決手段】 三相交流モータを駆動するECU(モータ駆動装置)において、ヒートシンク201の第1搭載部24は端部22に沿って形成される。第2搭載部25は第1搭載部24と直交する方向に形成され、第1列251と第2列252とから構成される。3個のモータリレー用MOS45は第1搭載部24に搭載され、6個のインバータ用MOS44および2個の電源リレー用MOS43は第2搭載部25に搭載される。MOS43、44、45のリード部46は制御及びパワー基板30に電気的に接続される。また、MOS43、44、45の熱は、絶縁放熱シート47を介してヒートシンク201に放熱される。このようにMOS43、44、45を配置することにより、ECUの体格を小型にすることができる。
(もっと読む)
61 - 80 / 1,422
[ Back to top ]