
Fターム[3D232DA64]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 電動機状態量 (3,403) | 電流 (1,422)
Fターム[3D232DA64]に分類される特許
161 - 180 / 1,422
油圧式パワーステアリング装置
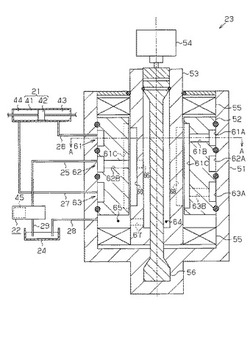
【課題】アシスト力の制御の自由度が高い油圧式パワーステアリング装置を提供する。
【解決手段】車両のステアリング操作を油圧シリンダ21によってアシストする油圧式パワーステアリング装置は、油圧シリンダ21に対する作動油の給排量を変更可能な流量制御弁23と、操舵トルクセンサ、操舵角センサ及び車速センサと、これらセンサの検出結果に基づいて油圧シリンダ21に作動油を給排する際の給排態様を設定し、その設定された給排態様に応じて流量制御弁23を制御するECUとを備えている。
(もっと読む)
電動パワーステアリング装置

【課題】システムの信頼性を維持すると共に、車両の走行状況に応じた適切な操舵フィーリングが得られる電動パワーステアリング装置を提供する。
【解決手段】操舵力補助装置は、電動モータ12、モータ駆動回路26A,26B及び制御手段11を全て独立して2個有し、電動モータ12はステータのティースに同一極性でモータ特性の異なる巻線を2個有する。このモータ特性は、高速回転/低トルク特性及び低速回転/高トルク特性であり、車両の走行状態によって選択できる。
(もっと読む)
電動パワーステアリング装置
【課題】進路変更を目的とするステアリング操作と外乱とを区別して、より好適に運転者の負担を軽減することのできる電動パワーステアリングを提供すること。
【解決手段】リードプル補償制御の実行時、直進状態ではないと判定した場合には、その後に発生する操舵トルクτ及び操舵トルク微分値dτの符号が一致する連続区間の長さ、即ち操舵トルクτの発生方向と変化方向とが一致する半周期分の経過時間を計測する。そして、その経過時間が、上記進路変更を目的とするステアリング操作時に発生する当該連続区間の長さに対応して設定された閾値C0よりも短い場合には、補正許可フラグをリセットせず、その車両が継続的に直進状態にある旨の判定を維持して、リードプル補償制御を継続する。
(もっと読む)
車両用操舵装置
【課題】車両が停止している状態で、実際の路面の摩擦係数を推定する。
【解決手段】操舵部材に連結されるシャフト回転の伝達比を変更するための伝達比可変機構6と、伝達比可変機構6の伝達比を変更する伝達比可変モータ20と、伝達比可変モータ20を駆動制御するDAFS制御部28と、伝達比可変機構20と舵取り機構10との間に設置され、操舵トルクを検出するための操舵トルクセンサ41と、舵取り機構10に取り付けられ、操舵補助力を発生するための操舵補助モータ42と、操舵トルクセンサ41の検出トルクに基づいて操舵補助モータ42を駆動制御するEPS制御部43と、車速ゼロ時のタイヤ転舵角に応じて算出されたタイヤ横力のタイヤ転舵角に対する比Gに基づき、路面摩擦係数を推定する路面摩擦係数推定部45とを備える。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】6つのFET31のうちの1つが短絡故障した場合には、制御可能領域特定部41は、電動モータ18の駆動を停止させた後、短絡故障が発生しているFETを特定するための処理を行なう。つまり、制御可能領域特定部41は、まず、各相の相電圧に基づいて、短絡故障が発生しているFETの上下段の位置(ハイサイドまたはローサイド)を特定する。次に、制御可能領域特定部41は、特定された上下段位置と、U相、V相およびW相の相電流のうちの2つの相電流とに基づいて、電圧短絡故障が発生しているFET31の相を特定する。
(もっと読む)
電動パワーステアリング装置
【課題】新たに設定されるモータ抵抗と実際のモータの抵抗との乖離を小さくすることのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、操舵系にアシスト力を付与するモータを備え、このモータの抵抗を示す値であるモータRm抵抗を更新する。具体的には、モータの誘起電圧EXが第1判定値GAよりも小さいことに基づいて、モータ抵抗Rmを更新する。また、誘起電圧EXが第2判定値GBよりも小さいとき、モータ電圧Vmをモータ電流Imにより除算した値である除算値を新たなモータ抵抗Rmとして設定する。
(もっと読む)
電動パワーステアリング装置
【課題】二系統のモータを同期制御する制御装置の演算負荷を軽減できる電動パワ−ステアリング装置を提供する。
【解決手段】モータ制御指令出力手段31は、第1指令値演算手段30により生成された第1の指令値とモータ駆動系毎の電流をモータ駆動系電流加算手段により加算された電流値に基づき、第2指令値演算手段34,35により演算された第2指令値をモータ制御指令としてモータとこのモータを駆動する駆動回路から構成される二系統のモータ駆動系に出力する。
(もっと読む)
電動パワーステアリング装置
【課題】ハンドルの戻し時に操舵の回転方向によるステアリング装置各部や車両の回転方向でのフリクションの左右差の影響で、ハンドル戻り特性に左右差が生じてしまい、右と左の操舵からの戻りの戻しトルク感、戻り速度、戻り角の特性に大きなアンバランスが生じる欠点があった。
【解決手段】モータ回転速度が無負荷回転数相当となった場合の操舵トルクを、判定された電動モータの回転方向別に記憶するメモリ88と、タイヤが路面から受けるタイヤの路面反力に相当するトルクに対して、前記メモリ88に記憶された各電動モータの回転方向における操舵トルクの前記回転トルク既定値に対する割合を係数として、トルク左右差の調整をする回転トルクの左右差調整部87とを備え、前記基本アシスト制御部71によって決定されたアシストトルクに対して、回転トルクの左右差調整部87によって調整された路面反力に相当するトルクを減算することにより、ハンドル戻し制御を行う。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータに過剰に電流が流れることに起因して電動モータが故障することを抑制する技術を提供する。
【解決手段】電動モータへ実際に供給される実電流を検出するモータ電流検出部と、操舵トルクに応じて定められた目標電流とモータ電流検出部にて検出された実電流とに基づいてフィードバック制御を行い第1の目標値を算出する第1の制御部と、操舵トルクに応じて定められた目標電圧が予め定められた所定範囲内である場合にはこの目標電圧を、所定範囲外である場合には予め定められた所定値を出力する電圧制限部316を有し、電圧制限部316からの出力値に基づいて第2の目標値を算出する第2の制御部300と、第1の目標値または第2の目標値に基づいて電動モータの駆動を制御するモータ駆動制御部と、モータ電流検出部の異常を把握しない場合には第1の目標値に基づき、異常を把握した場合には第2の目標値に基づくように目標値を切り替える切替部と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】通電不良相発生における、特に高速走行中でのトルクリップルの影響を抑制し、微妙なハンドル操舵を容易にすることのできる電動パワーステアリング装置を提供する。
【解決手段】CPU17は、モータ12の何れかの相に通電不良が発生した場合に該異常の発生を検出可能な異常判定部31を備え、該異常が検出された場合には、当該通電不良発生相以外の二相を通電相としてモータ制御信号の生成を実行する。そして、このとき、CPU17は、当該通電不良発生相に応じた所定の回転角を除いて、q軸電流指令値Iq*に対応したq軸電流値Iqが発生するようにd軸電流指令値Id*を演算する。そして、EPSECU11から、CAN通信20を通じてエンジンECU19に、車速制限要求信号Vrsを出力する。エンジンECU19は受取った車速制限要求信号Vrsが「1」の場合、エンジン回転数制御を行い、車速を所定車速V0以下にする。
(もっと読む)
電動パワーステアリング装置
【課題】平坦路と悪路の走行時の車両の直進安定性と操舵フィーリングの向上を図ることが可能な電動パワ−ステアリング装置を提供する。
【解決手段】モータは、二系統のモータコイルに共通のステータ及びロータを有しており、ECU(制御手段)は、これらの各モータコイルに対して、それぞれ独立に駆動電力を供給することにより、そのモータトルクを制御する。
車両が悪路走行していると判断した場合には、操舵トルク及び車速に応じてアシストトルクを制御するトルク制御を実行している系統の他方の系統のモータの少なくとも二相間を短絡して制動動作させる。
(もっと読む)
電動パワーステアリング装置
【課題】モータを駆動する各相電流指令値のゼロクロス時においても、モータからの振動及び異音が発生することがなく、操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】デッドタイム補償演算手段は、各相電流指令値がゼロ値を含む所定範囲内にある場合には、デッドタイム補償量の加算又は減算によってデッドタイムを補償するデッドタイム補償を行わず、電流フィードバック制御に用いるフィードバックゲインを、各相電流指令値が所定範囲外にある場合に比べて大きくする。
(もっと読む)
電動パワーステアリング装置
【課題】 非干渉制御による振動を抑制しつつ、電流応答性を確保することができる電動パワーステアリング装置を提供すること。
【解決手段】 d軸指令電圧とq軸指令電圧の相互干渉成分を打ち消す非干渉制御を行う際に、回転子の角速度が所定値以下のとき、q軸非干渉補正値における回転子の角速度の影響が小さくなるように補正角速度を決定するとともに、回転子の角速度が所定値より大きいときd軸非干渉補正値およびq軸非干渉補正値における回転子の角速度の変化率を回転子の角速度の変化率とほぼ一致するように補正角速度を決定するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】
モータを駆動する各相電流指令値のゼロクロス時においても、モータからの異音の発生することがなく、且つ操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】
回転角補正演算手段は、モータの回転角が所定範囲内にあり、モータの回転角が所定範囲内で増加している場合には、モータの回転角を、モータの回転角の所定範囲内の最大値に固定し、モータの回転角が所定範囲内で減少している場合には、モータの回転角を、モータの回転角の所定範囲内の最小値に固定する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】
通電不良相発生における、特に高速走行中でのトルクリップルの発生を抑制し、微妙なハンドル操舵を容易にすることのできるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】
CPU17は、d軸電流指令値Id*及びq軸軸電流指令値Iq*を演算する電流指令値演算部23と、これらd軸電流指令値Id*及びq軸軸電流指令値Iq*に基づいてd/q座標系における電流フィードバック制御を実行することによりモータ制御信号を生成するモータ制御信号生成部24とを備える。また、CPU17は、モータ12の何れかの相に通電不良が発生した場合に該異常の発生を検出可能な異常判定部31を備え、該異常が検出された場合には、当該通電不良発生相以外の二相を通電相としてモータ制御信号の生成を実行する。そして、車速検出手段16が検出した車速が所定値以上になった場合には、q軸電流指令値Iq*を漸減する。
(もっと読む)
電動パワーステアリング装置
【課題】外乱の存在する環境下においても走行軌跡の乱れを抑えて円滑に自動制御を実行することのできる電動パワーステアリング装置を提供すること。
【解決手段】ECUは、二系統の独立したモータコイルに対応して設けられた二つの駆動回路26A,26Bと、これら各駆動回路26A,26Bに対して二系統の独立した制御信号Smc_a,Smc_bを出力するマイコン27とを備える。マイコン27は、アシスト力に対応したモータトルクを発生させるべく、電流制御を実行することにより第1系統の駆動回路26Aに対して制御信号Smc_aを出力する第1制御信号出力部31Aを備える。そして、更に、転舵輪の舵角を変更すべく車内ネットワークを介して上位ECUから入力される操舵角指令値θs*に基づいて、位置制御を実行することにより第2系統の駆動回路26Bに対して制御信号Smc_bを出力する第2制御信号出力部31Bを備える。
(もっと読む)
差動制限機構の制御装置
【課題】差動制限機構の制御装置に関し、差動制限機構の作動時に発生する操舵反力変化を操舵アシスト力によって抑制するものにおいて、操舵アシスト力を付与できない操舵アシスト側のインタロック作動時にも操舵反力変化を抑制することができるようする。
【解決手段】車両の左右輪4FR,4FLの差動を制限する差動制限機構5と、車両の操舵に対しアシストトルクを付加するパワーステアリング機構8とを有し、差動制限機構5の動作に応じて、パワーステアリング機構8の制御量を増減制御する制御手段10とを有すると共に、パワーステアリング機構8のインタロックの作動を検出するインタロック作動検出手段を有し、制御手段10は、インタロック作動検出手段によりインタロックの作動を検出した際には、差動制限機構5の制御量を減少させる。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングの操舵状態の判定結果について誤りが生じる頻度を少なくすることのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、操舵系にアシスト力を付与するモータの電流(モータ電流Im)と、ステアリングの操舵速度ωsとに基づいて、ステアリングの操舵状態を判定する。すなわち、ステアリングが中立位置以外の位置で保持されている状態を保舵状態とし、ステアリングが中立位置にある状態を中立状態とし、操舵速度ωsが判定値ωaよりも小さく、かつモータ電流Imが基準値Ixよりも大きいとき、ステアリングの操舵状態が中立状態か否かを判定する。そして、操舵速度ωsが判定値ωaよりも小さく、かつモータ電流Imが基準値Ixよりも大きく、かつ前回判定時にステアリングの操舵状態が中立状態にある旨判定しているとき、ステアリングの操舵状態が中立状態にある旨判定する。
(もっと読む)
電動式動力補助操向装置
【課題】運転者に合う操舵補助力を提供できる電動式動力補助操向装置を提供する。
【解決手段】ハンドルに作用する操舵トルクを検出し、操舵トルク信号を出力する操舵トルクセンサー110と、車両速度を検出し、車速信号を出力する車速センサー111と、運転者の操作に基づいて徐々に増加または減少する線形的な変化を表す信号を出力する操舵補助力設定部と、上記操舵補助力設定部から出力された信号の入力を受けて、特定速度で最大操舵トルク、最大目標電動機電流、または操舵トルクに対する目標電動機電流の比率が徐々に増加または減少するようにして操舵補助力マップを設定するマップ設定部112aと、上記操舵トルク信号及び車速信号に該当する目標電動機電流信号を上記操舵補助力マップに従って出力する電流信号供給部112cと、上記目標電動機電流信号に対応する電流を電動機108に供給する電動機駆動部113と、を含む。
(もっと読む)
電動パワーステアリング装置
【課題】モータを駆動する各相電流指令値のゼロクロス時においても、モータからの振動及び異音が発生することがなく、操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】デッドタイム補償演算手段は、各相電流指令値がゼロ近傍の所定範囲内にある場合には、モータの回転角速度に応じて各相のデッドタイム補償量を変え、回転角速度の絶対値が所定値より小さい場合には、回転角速度の絶対値が小さくなるに従い、各相のデッドタイム補償量を漸減させる。
(もっと読む)
161 - 180 / 1,422
[ Back to top ]