
Fターム[3D232DA98]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 乗員の状態 (133)
Fターム[3D232DA98]に分類される特許
1 - 20 / 133
運転集中度基盤の車線維持制御装置およびその方法
車両姿勢制御装置
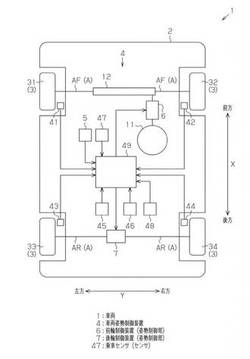
【課題】所定の乗車位置における乗り心地の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7を備える。前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1に乗っている乗員の数である乗員数および車両1に乗っている乗員の位置である乗車位置を検出する乗車センサ47の出力に基づいて車両1の姿勢を制御する。
(もっと読む)
操舵支援装置

【課題】ドライバの運転意思に応じて制御方法を適切に変更する操舵支援装置を提供する。
【解決手段】自車両が走行車線に沿って走行するように操舵機構に操舵力を付与する操舵支援装置を、環境認識手段と、環境認識手段を用いて目標走行位置を設定する目標走行位置設定手段と、自車両の横位置を認識する自車横位置認識手段と、目標走行位置と横位置との偏差に基づいて目標操舵力を設定する目標操舵力設定手段と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵制御手段と、ドライバの運転意思を判定する運転意思判定手段とを備え、目標操舵力設定手段は、偏差の増加に応じて増加するよう設定される第1の目標操舵力と、偏差が所定値以上の時のみ所定の値に設定される第2の目標操舵力とを有し、操舵制御手段は、ドライバの運転意思が高い状態と判定されたときは前記第1の目標操舵力に基づいて操舵力を付与するとともに、運転意思が低下状態と判定されたときは第2の目標操舵力に基づいて操舵力を付与する構成とする。
(もっと読む)
操舵補助制御装置
【課題】操舵補助制御実行中における運転者の適正な関わりを検出するとともに、運転者の操舵補助制御に対する監視放棄を抑制することのできる操舵補助制御装置を提供すること。
【解決手段】操舵補助制御中の第1所定時間経過後に(S1)、アシストトルクを通常の操舵補助制御に基づく目標アシストトルクから運転監視確認用アシストトルクに調整し(S2〜S4)、所定期間内に運転者の反応が検出されなかった場合には(S5、S7)、運転者への警告を発するとともに操舵補助制御を停止する(S8)。
(もっと読む)
ステアリング装置、産業車両およびプログラム
【課題】産業車両の発進時に運転者が意図しない方向に進んでしまうのを防止する。
【解決手段】フォークリフト1のステアリング装置5では、フォークリフト1に運転者が存在しない(S120:NO)という条件が成立した場合に、操舵輪53の舵角が基準となる基準角まで戻る復帰制御が行われる(S150〜S230)。これにより、上記条件の成立により復帰制御が行われることを知る運転者にとっては、フォークリフト1の進行方向が復帰制御により基準角に応じた方向になっていることを認識できるため、フォークリフト1の発進時に運転者が意図しない方向に進んでしまうようなことがなくなる。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
舵力評価装置、及び、舵力評価方法
【課題】操舵時に機械的に検出される実舵力とドライバが感じる感受舵力との関係を定量的に評価することができる舵力評価装置を提供する。
【解決手段】操舵制御部20は、ステアリングホイール4に対する実舵力Tsを提示しながら基準舵力T0までの操舵をドライバに促すことで基準舵力T0をドライバに知覚させた後、実舵力Tsを提示しない状態で基準舵力の所定倍nに設定された複数の指示舵力n・T0までの操舵をドライバに順次促すことで各指示舵力n・T0に対ししてドライバが入力した実舵力Tsとの関係をサンプリングし、実舵力Tsに対応する指示舵力n・T0をステアリングホイール4に対してドライバが入力したと感じる感受舵力Th_bとして定義して、実舵力Tsと感受舵力Th_bとの関係を示す感受特性を関数近似する。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
操舵反力制御装置
【課題】運転者の状態に応じたより適切な補助反力をステアリングに付与可能とする操舵反力制御装置を提供する。
【解決手段】操舵反力制御は、運転者の疲労状態及びステアリングホイールの把持位置などの運転者の把持姿勢に応じて、ステアリングに付加する補助トルクを補正する。補助トルクは、例えば操舵トルクや操舵フリクションである。例えば反力装置コントローラ6は、検出する運転者の把持位置がステアリングホイール7の中心に対して上側に位置していると判定しているときに、運転者が疲労状態になったと推定すると、疲労状態でないと推定した場合に比べて、補助トルクを増大補正する。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
移動体の操舵反力調整装置
【課題】運転者の疲労状態により適した操舵反力に近づくように当該操舵反力を調整可能とすることを目的とする。
【解決手段】操舵反力用コントローラ6は、筋力検出部11と、疲労推定部12と、反力調整部13とを備える。筋力検出部11は、筋骨格モデルとアドミタンス計測手法をもちいて、運転者の肩部から手までに位置する腕の筋肉のうちから選択した複数の筋の筋力を推定する。そして、推定した複数の筋の疲労度と操作子の操舵状態とに基づき、操作子に付加する操舵反力を調整する。
(もっと読む)
車両の操作状態判定システム
【課題】本発明は、車両の操作状態判定システムにおいて、運転者の意図的な運転操作をより正確に判別することを課題とする。
【解決手段】本発明は、上記した課題を解決するために、車輪の転舵角またはステアリングホイールの操舵角が変化したときに、操舵装置に入力されるトルクがピークに到達した後に閾値Tb以上の大きさを維持する時間が基準時間tbase以上であることを条件に、車輪の転舵角の変化が運転者の意図的な操舵に因ると判定するようにした。
(もっと読む)
運転支援装置
【課題】旋回半径が変化するような場合であっても、適切な目標軌道を設定することが可能な運転支援装置を提供すること。
【解決手段】前方道路を含む所定エリアに設定した複数のポイントの運動に関して、車両の運転者の注視点への視線方向を軸として、その軸周りで回転する回転運動成分を算出し、回転運動成分の大きさが等しい等ポテンシャルラインを車両の目標軌道として設定する。これにより、車両が旋回しようとするカーブ路の旋回半径が途中で変化している場合であっても、その旋回半径の変化に応じて動的に回転運動成分の強度分布も変化するので、等ポテンシャルラインにより適切な目標軌道を設定することができる。
(もっと読む)
車両用操舵制御装置
【課題】 運転者の意図しないステアリング操作を回避し、運転者に違和感を与えることのない車両用操舵制御装置を提供すること。
【解決手段】 運転者によって操舵されるステアリングの操舵状態に応じて操向輪を転舵する転舵手段と、ステアリングに操舵反力を付与する反力付与手段と、を備えた車両用操舵制御装置において、運転者の意図しない操舵操作が発生する状況を検出したときは、ステアリング操舵角の変化を抑制するように操舵反力を付与することとした。
(もっと読む)
走行車両自動操舵用駆動装置
【課題】異なる走行車両に対応する汎用性の高い自動操舵駆動装置を提供するとともに、緊急時の手動ハンドル操作を可能にする自動操舵駆動装置を提供すること。
【解決手段】電磁クラッチのオンオフにより中間軸駆動用の正逆転モータを作動制御してステアリングシャフトを自動操舵モードで駆動制御する自動操舵制御手段を設け、例えはクラッチペダルのオン、左又は右のブレーキペダルのオン又は前後進レバーが前進側又は後進側に移動されるなどの何らかの走行車両の挙動操作が行われると、該自動操舵制御手段は正逆転モータによる自動操舵モードを禁止する制御とすることで走行安全性を確保する。
(もっと読む)
車両の周辺監視装置
【課題】車両に搭載されたカメラにより撮像した画像に基づいて車両の周辺の対象物を検出し、該対象物についての警報を運転者に発行した場合に、該警報が発せられることによって車両のふらつきが発生することがある。
【解決手段】車両に搭載された撮像装置によって撮像した画像に基づいて車両周辺の対象物を検出し、該撮像画像に基づく表示画像を、該車両の乗員が視認可能なように表示装置上に表示する。対象物が車両から所定範囲内にあるときには、該表示画像上に該対象物に関する警報を行う。該車両には、運転者によるステアリングホイールの操舵を補助するパワーステアリング装置が備えられており、少なくとも上記の警報を発している間にわたり、ステアリングホイールの操舵を補助するアシスト量を低減するように、パワーステアリング装置を制御する。
(もっと読む)
ドライバ覚醒装置
【課題】ドライバを効果的に覚醒させることができるドライバ覚醒装置を提供する。
【解決手段】覚醒度検出装置70によってドライバ100の覚醒度の低下が検出されたときに、演算部64によって、目標操舵トルク算出部63によって算出された目標操舵トルクに、操舵角センサ62によって検出された操舵角の時間変化の2階微分値を加算して覚醒度低下時目標操舵トルクが算出され、算出された覚醒度低下時目標操舵トルクから操舵トルクセンサ61によって検出された操舵トルクを減算することにより、目標アシストトルクが算出される。制御部65が、演算部64によって算出された目標アシストトルクに基づいて、転舵輪(左車輪W1,右車輪W2)を転舵させるモータ50を制御する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】ステアリング位置の変更等が行われてもコラム剛性を適切に維持し、振動、騒音が悪化することなく、操舵の車両応答性や舵のしっかり感を良好に保つ。
【解決手段】基本アシストトルクTbを0に設定する不感帯をステアリング位置Ptと車速Vに基づいて可変設定し、車速Vと操舵トルクTsに応じて基本アシストトルクTbを設定し、ステアリング位置Ptと車速Vに基づいて基本アシストトルクTbに対して乗算補正するトルク補正係数Acを演算し、ステアリング−ラックねじれ量Sと車速Vに基づいて基本アシストトルクTbに対して増減補正する増減補正量Bcを演算し、基本アシストトルクTbにトルク補正係数Acを乗算し、この値を増減補正量Bcで増減補正してアシスト指示値Taを演算し、該演算したアシスト指示値Taをモータ駆動部21に出力して電動モータ13を駆動して操舵トルクをアシストする。
(もっと読む)
車両操作支援装置
【課題】運転における安全性を高めることが可能な車両操作支援装置を提供する。
【解決手段】車両挙動制御装置10は、自車両の運転操作を制御する車両操作支援装置であって、自車両のドライバのくしゃみといった所定の生理現象を検知する生理現象検知部1と、生理現象検知部1により所定の生理現象が検知された際に、ドライバによる所定の操作が行われたか否かを判定する操作量検知部3及び条件判断部5と、操作量検知部3及び条件判断部5により所定の操作が行われたと判定された場合に、所定の操作による自車両の挙動を緩和する緩和制御を行なう緩和制御部6と、を備える。これにより、ドライバのくしゃみといった所定の生理現象を原因とする意図しない急な所定の操作を原因とする急な車両挙動を緩和して運転における安全性を高めることが可能になる。
(もっと読む)
視線技術、死角インジケータ及びドライバ経験を用いる予測ヒューマン・マシン・インタフェース
【課題】 車両における事故予防システム及び方法を改善すること。
【解決手段】 車両における事故を予防するシステム及び方法を開示する。そのシステムは、ドライバから視線ベクトルを受け取る視線検知器を備える。そのシステムは、近隣の複数の物体の位置及びそれらの速度を検出する近接センサをさらに備える。車両事故リスクを、その近隣の物体の位置及び速度に基づいて判定する。さらに、車両の周囲の状況に関するドライバの認識を、その近隣の物体の位置及び速度に加えて、視線位置にも基づいて判定する。そのドライバの認識及びその車両事故リスクに応じて、車両警報を起動する。
(もっと読む)
1 - 20 / 133
[ Back to top ]