
Fターム[3D244AE19]の内容
Fターム[3D244AE19]に分類される特許
21 - 40 / 91
車速制御装置
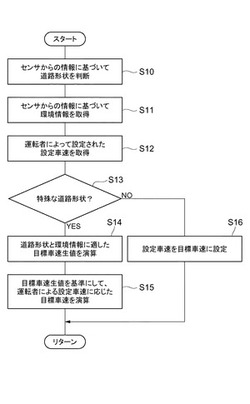
【課題】運転者の感覚に合った走行が可能な適切な目標車速に変更できる車速制御装置を提供することを課題とする。
【解決手段】目標車速に基づいて車両の車速を制御する車速制御装置であって、運転者の特性を推定する運転者特性推定手段と、走行中の道路形状を取得する道路形状取得手段と、運転者特性推定手段で推定した運転者の特性と道路形状取得手段で取得した道路形状に基づいて目標車速を変更する目標車速変更手段とを備えることを特徴とする。
(もっと読む)
車両用減速制御装置及び車両用減速制御方法

【課題】カーブに対する車両の減速制御を適切に行う。
【解決手段】車両用減速制御装置は、測位部14aが測位した車両位置と記憶媒体14cに記憶された地図情報とを基に、地図情報の地図上の車両位置を特定するマップマッチングを行うマップマッチング部14bと、マップマッチング部14bが特定した地図上の車両位置と地図情報とから、車両前方のカーブ曲率を検出し、検出したカーブ曲率の大きさを基に算出した目標減速度を基に、車両を減速制御する制駆動力コントロールユニット8と、を備える。制駆動力コントロールユニット8は、マップマッチング部14bによるマップマッチングの確度を算出し、算出したマップマッチングの確度が低いほど、目標減速度が小さくなるように補正する。
(もっと読む)
車両用走行制御システム
【課題】交通流に合わせるためにドライバがアクセル操作により加速した後、再び道路形状に応じた車速まで減速することに伴い、ドライバに与える違和感を抑制する。
【解決手段】車両用走行制御システムは、ナビゲーション装置から制限車速情報を取得して、自車走行レーンにおける制限車速を決定する制限車速走行手段5と、先行車の状態を検出する先行車検出手段3とを有する。さらに、ドライバが設定した設定車速および先行車との車間に応じて設定される追従車速のうちいずれか小さい車速を選択してクルーズコントロール車速を決定するクルーズコントロール車速決定手段5と、クルーズコントロール車速および制限車速のうち小さい車速を目標車速として自車の走行を制御する走行制御手段5を備える。そして、走行車速変更手段5は、制限車速で走行中にドライバによる加速操作が検出された場合、目標車速を制限車速からクルーズコントロール車速へ変更する。
(もっと読む)
追従走行制御装置
【課題】追従走行の発進時に、制御のもたつきや先行車の挙動に起因にした変動のない、スムーズで滑らかな発進を実現する。
【解決手段】判断部22により先行車の発進と判断すると、検出部21の検出に基づき、先行車に対する自車1の追従状況に応じて時々刻々変化するFF制御の目標値を設定部23が設定する。そして、FF制御部24の走行制御により、設定された目標値に基づき、先行車の時々刻々の発進状況に応じたFF制御で自車がもたつきや変動のない、スムーズで滑らかな発進を実現する。
(もっと読む)
車両走行制御装置
【課題】 車両が旋回中に所定の速度で走行する走行制御が開始された場合でも、ドライバ対して与える違和感を小さくすることができる車両走行制御装置を提供する。
【解決手段】 車間制御ECU1は、ヨーレートセンサ5から送信されるヨーレート信号および車速センサ7から送信される車速信号に基づいて自車両の旋回状態を検出する。ここで、自車両が旋回状態にあるときにクルーズ設定スイッチ4がONとされた場合には、ACCを開始するとともに、スロットル開度を0に設定して、現状のスロットル開度を維持するようにする。
(もっと読む)
車両用走行制御装置
【課題】よりドライバの感覚に合った走行制御を行う車両用走行制御装置を提供することを目的とする。
【解決手段】先行車との車間距離を目標距離に保つ車間制御モードと、前記先行車を確認できない場合に車速を設定車速に保つ定速制御モードとが切り替え可能で、前記車間制御モードから前記定速制御モードへの移行時であっても自車の走行環境が所定の走行環境である場合には当該移行に伴う加速を抑制する加速抑制制御を行う車両用走行制御装置であって、前記加速抑制制御を実行中にドライバによりアクセルペダルが踏下されたか否かの情報を取得するドライバ情報取得手段と、前記ドライバ情報取得手段により前記アクセルペダルが踏下された旨の情報を取得すると、前記加速抑制制御を解除して前記アクセルペダルの踏下に応じた加速を行う制御を行う車速制御手段とを有することを特徴とする。
(もっと読む)
鞍乗型車両用の制御装置および鞍乗型車両
【課題】定速走行制御が実行される鞍乗型車両の操作性を向上させる
【解決手段】鞍乗型車両用の制御装置100は、定速走行制御の目標車速を記憶する第1記憶部101と、アクセル全閉位置からさらに閉じる方向にアクセル12が操作されたことを検知する第1検知部104を備えている。さらに、この鞍乗型車両用の制御装置は、定速走行制御中において、第1検知部104によって、当該操作が検知されたときに、第1記憶部101に記憶された目標車速を下げる減速処理部105を備えている。
(もっと読む)
燃料噴射量制御システム
【課題】走行燃費向上に繋がる燃料噴射量制御と、車両の状態に対応した加速度の実現とを両立することが出来る燃料噴射量制御システムの提供。
【解決手段】オートクルーズスイッチ(9)と、車速を計測する装置(車速センサ7)と、トランスミッションのギヤ段を検出する装置(20)と、アクセル開度を計測する装置(アクセル開度センサ30)と、エンジン回転速度を計測する装置(40)と、計測された車速、トランスミッションのギヤ段、アクセル開度、エンジン回転速度、オートクルーズスイッチの操作内容が入力される制御装置(10)とを有し、該制御装置(10)は、車両の状態(例えば車速、車両積載状態、走行中の道路の勾配)に対応して噴射量制限の作動と解除を決定する機能を有する。
(もっと読む)
車両用運転支援装置
【課題】本発明は、アダプティブ・クルーズ・コントロール運転において燃料消費率の悪化を抑制できる車両用運転支援装置を提供する。
【解決手段】 車両用運転支援装置40は、先行車両30との車間距離を検出するスキャン式レーザレーダ41とECU50となどを備えている。ECU50は、先行車両認識部51と目標車速演算部53となどを備えている。先行車両認識部51は、スキャン式レーザレーダ41の検出結果に基づいて先行車両30の車速を検出する。目標車速演算部53は、通常追従モードであるかもしくはエコ追従モードであるかを判定する。目標車速演算部53は、自動車10が通常追従モードであると、通常追従モードに対応する加速で先行車両30を追従すべく目標車速を設定するとともに、自動車10がエコ追従モードであると、通常追従モードよりも小さい加速で先行車両30を追従すべく目標車速を設定する。
(もっと読む)
走行制御装置及び車両
【課題】ドライバによる手動操作でも目標加減速度を容易に達成することができる走行制御装置を提供することを課題とする。
【解決手段】少なくとも車両の加減速を制御する走行制御装置であって、誘導目標加減速度に対応するアクセル操作量又はブレーキ操作量のレンジを誘導目標加減速度外に対応するアクセル操作量又はブレーキ操作量のレンジより広く設定する加減速度特性設定手段を備えることを特徴とし、加減速度特性設定手段では、アクセル操作量と当該アクセル操作量に対応する加減速度との関係及びブレーキ操作量と当該ブレーキ操作量に対応する加減速度との関係を規定する基本マップBM1に対して、誘導目標加減速度を達成するための加減速度に対応するアクセル操作量又はブレーキ操作量のレンジを広く設定したマップGM1を生成する。
(もっと読む)
車両の走行制御装置
【課題】 運転者に対して最適なタイミングで車間距離の制御や衝突回避の制御を実施する。
【解決手段】 先々行車を検知するミリ波レーダ2を備え、運転者からの前方の視認状態の情報を入手する前方カメラ12を備え、ミリ波レーダ2により先々行車の存在が確認された時の前方カメラ12による前方の見え方に応じてエンジン4の出力制御の作動状況、ブレーキ5の効かせ方の状況、シートベルト6やサポート部材9による乗員の拘束状況の作動タイミングを調整し、運転者の目線でみた状態に基づいて、車間距離の制御や衝突回避の制御といった走行制御を的確に行なう。
(もっと読む)
車両用制御装置
【課題】車両の燃費を向上させつつ、運転者の加速要求を駆動力に適切に反映させる。
【解決手段】車両用制御装置10は、車両の駆動力を発生する内燃機関Eの吸気系において吸入空気量を調整するDBWドライバ12およびDBW13とスロットル弁とを具備し、車間距離センサ33により検出される車間距離Dに基づき先行車両が存在しないと判定し、かつ、車両の発進時にアクセルペダルセンサ32により検出されるアクセルペダル開度APの変化が所定の下限閾値Lim_L以上かつ上限閾値Lim_H未満である場合に、標準発進加速状態であると判定し、内燃機関Eでの燃料消費量が最小となるようにしてスロットル弁による吸入空気量を制御する。
(もっと読む)
車両用走行制御装置
【課題】車速変動許容範囲を最適な範囲に変更することができる車両用走行制御装置を提供する。
【解決手段】車両用走行制御装置は、車速を検出する車速センサ11と、目標車速を設定する復帰/加速スイッチ13およびセット/減速スイッチ14と、目標車速設定手段により設定された目標車速を含む車速変動許容範囲を設定する車速変動許容範囲設定手段と、車速変動許容範囲内において指示車速を算出する指示車速算出手段と、指示車速に基づいて車両の走行制御を行うスロットル開度制御部36と、乗員の操作により車速変動許容範囲を変更する上限車速変更スイッチ19および下限車速変更スイッチ20を備える。
(もっと読む)
車両走行制御装置
【課題】車両の発進時の過度な急加速を防止することができる車両走行制御装置を提供することである。
【解決手段】車両走行制御装置1は、アクセルペダル7とは別に運転者の手による操作で車両を加速させるための補助加速操作レバー8と、ECU2と、アクセルペダル7の踏み込み量を検出するアクセル開度センサ3と、補助加速操作レバー8の操作量を検出するレバー操作量センサ4と、車両の車速を検出する車速センサ5とを備えている。ECU2は、アクセルペダル7の踏み込み量、補助加速操作レバー8の操作量、車速に基づいてスロットルバルブ6の開度(スロットル開度)を設定する。このとき、アクセルペダル7及び補助加速操作レバー8によるスロットル開度の設定に対する寄与度を変更する。
(もっと読む)
車速制限装置
【課題】制限速度を運転者の希望する値に容易に設定可能にする。
【解決手段】乗員により設定された制限速度を記憶する制限速度記憶部22と、自車両の走行速度が前記制限速度以下となるように制御する車速制御部23と、道路デ−タを記憶する道路データ記憶部12と、GPS受信器11で検出した自車両の位置および道路データ記憶部12に記憶された道路デ−タに基づいて自車両の道路位置を認識する道路位置認識部21と、を備え、制限速度記憶部22は、乗員により設定された制限速度と該制限速度が設定された自車両の道路位置とを対応させて記憶し、車速制御部23は、自車両が走行する道路位置に対応して制限速度が記憶されている場合には、自車両の現在位置に基づいて制限速度記憶部22に記憶された制限速度を選択し、この制限速度以下となるように自車両の走行速度を制御する。
(もっと読む)
車両用駆動力制御装置
【課題】先行車との相対的な位置関係に基づいて車両の駆動力を制御する場合に、運転者の感覚に合った駆動力制御を行うことが可能な車両用駆動力制御装置を提供する。
【解決手段】先行車との相対的な位置関係に基づいて車両の駆動力を制御する車両用駆動力制御装置であって、前記相対的な位置関係に基づいて算出された基準駆動力(Ta)に対して、前記先行車との間の相対車速と車間時間とに基づいて応答性を考慮した補正を行い、前記補正の結果として補正駆動力(Tb)を求める補正手段を備え、前記補正駆動力(Tb)に基づいて前記駆動力を制御する。
(もっと読む)
自動車のための速度制御システムの駆動状態を選択する方法
【課題】速度制御システムの駆動状態の自動的な選択,特に適応的な速度制御システムのアクティブな状態と非アクティブな状態の間の選択を,目隠し認識の結果を適切に考慮して,駆動状況の大きな帯域幅内で適応的な速度制御システムの高い利用性と運転者にとっての妥当なシステム反応が達成されるように改良することである。
【解決手段】間隔センサと自動的な目隠し認識とを有する,自動車のための速度制御システムにおける駆動状態を選択する方法は,上記間隔センサが目隠しされている場合に速度制御を自動的にオフすることに関して,少なくとも1つの他の条件(S7)も調べられ,この他の条件も満たされている場合にのみ上記速度制御の自動的オフが行われることを特徴としている。
(もっと読む)
制駆動力制御装置
【課題】前方車両との位置関係に基づいて駆動力の制御を行なう制駆動力制御装置であって、運転者が最適と感じる駆動力の制御を行なうことが可能な制駆動力制御装置を提供する。
【解決手段】前方車両との位置関係の目標値(402)を設定し、前記目標値に基づいて制駆動力の制御を行う制駆動力制御装置であって、前記制駆動力の制御を行わなかった場合の制駆動力に対応する第1特定値(404)と、前記制駆動力の制御を行った場合の制駆動力に対応する第2特定値(405)との差である特定偏差(407)を求める手段と、前記特定偏差に基づいて、前記目標値を変更する手段とを備えている。
(もっと読む)
車速制御装置
【課題】ハンドル角を検出することなく、安価な構成で定速走行制御装置や車間距離制御装置に適用可能な車速制御装置を提供する。
【解決手段】設定された目標車速Vccと実車速Vとの偏差に基づいて車両の速度を制御する車速制御装置において、車両の操舵装置に入力される操舵トルクThを検出する操舵トルク検出手段2と、操舵トルクThに基づいて目標車速の補正量Varを求める車速補正量設定手段28と、目標車速に対する加速制御ゲインGaccの補正量Garを設定する加速制御ゲイン補正量設定手段32と、補正量Varに基づいて目標車速Vccを補正するとともに補正量Garに基づいて加速制御ゲインGaccを補正する補正手段30,34とを備えるように構成する。
(もっと読む)
車両およびその制御方法
【課題】定速走行指示がなされたときにより適正な制御を行なう。
【解決手段】モータからの動力を用いて走行する電気自動車において、定速走行が指示されたときに(ステップS110)、要求トルクTd*が負のトルクであると共に車両の状態がクリープトルク出力領域にあるときには(ステップS160,S200)、モータから出力するクリープトルクを徐減させて値0にすると共に(ステップS230〜S290)駆動輪に要求トルクTd*に基づく制動力を作用させる(ステップS300,S310)。こうした制御によりモータから駆動方向のトルク(クリープトルク)を出力する一方で駆動輪に制動力を作用させるものに比して、より適正な制御を行なうことができ、エネルギ効率の向上を図ることができる。
(もっと読む)
21 - 40 / 91
[ Back to top ]