
Fターム[3D244AE22]の内容
Fターム[3D244AE22]に分類される特許
1 - 20 / 35
運転支援装置
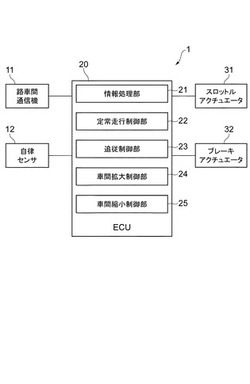
【課題】渋滞をより緩和することが可能な運転支援装置を提供する。
【解決手段】本発明の一実施形態に係る運転支援装置1は、定常速度で走行するための運転支援装置において、直前車の発進とともに加速制御を行い、直前車を追従する追従制御手段23と、車速を直前車よりも小さくし、直前車との車間距離を次第に拡大する車間拡大制御手段24と、車速を直前車よりも大きくし、直前車との車間距離を次第に縮小する車間縮小制御手段25とを備える。
(もっと読む)
車両走行制御装置及び車両走行制御方法

【課題】渋滞時における追従走行において、無駄な加減速を低減することが可能な車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】渋滞先頭距離計測装置16が、渋滞先頭JHの位置からの自車両100の先行車200Pの位置を判定し、車両制御ECU18が、渋滞先頭距離計測装置16が判定した渋滞先頭JHの位置からの先行車200Pの位置に基づいて、先行車200Pの挙動を予測する。加減速度発生装置20は、車両制御ECU18が予測した先行車200Pの挙動に基づいて、先行車200Pに対して自車両100を追従走行させる。そのため、単なる先行車200Pの瞬間的な挙動への対応ではなく、渋滞先頭位置からの先行車200Pの位置に基づいて予測される先行車200Pの挙動に対応して、自車両100を追従走行させることとなるため、自車両100の無駄な加減速を低減することができる。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
オートクルーズ制御方法と装置
【課題】坂道においても制御遅れによる車速の乱れが起こらず、搭乗者には何ら違和感を感じさせないようにしたオートクルーズ制御方法と装置を提供することが課題である。
【解決手段】予め、撮像装置38により検出した道路の勾配と車速センサ26が検出した実車速とに対応したエンジンへの燃料噴射量を、車速−勾配対応燃料噴射量記憶装置24に記憶し、撮像装置38で道路の勾配と勾配開始位置とを検出したとき、目標車速と前方道路の勾配とに基づいて、車速−勾配対応燃料噴射量記憶装置24から対応するエンジンへの燃料噴射量を読み出すか記憶されたデータから算出し、撮像装置38により検出した勾配開始位置、または前記読み出すか算出した燃料噴射量に対応するエンジン回転数となるまでの時間遅れを加えて決定した勾配開始位置より手前の位置から、前記燃料噴射量でエンジンを駆動する勾配併用制御オートクルーズにより目標車速を維持するようにした。
(もっと読む)
定速走行制御装置
【課題】アクセルペダル操作によって目標車速を変更できる定速走行制御装置において、様々な運転シーンにおいて違和感の少ない加減速度制御を行うことができるようにする。
【解決手段】アクセルペダルの操作量に応じて変更される目標車速Vo_tと現在の自車速Vo_pとを用いて算出される要求加速度Gx_tを、要求加速度変更手段55において、加速度上限値によって制限する。この加速度上限値は、現在の自車速Vo_pが現在車速閾値TH_pよりも高い場合、現在の自車速Vo_pがそれよりも低い場合より低く設定される。そのため、高速走行中における意図しない急加速を抑制することができる。また、アクセルペダルが大きく踏み込まれ高い目標車速Vo_tが設定されたときには、1よりも大きい第1ゲインが乗じられて加速度上限値が高い値に変更される結果、高い要求加速度Gx_tが設定されることになる。
(もっと読む)
車間制御装置
【課題】運転者が感じる違和感を低減することができる車間制御装置を提供する。
【解決手段】車間制御装置1は、ECU2を備えている。ECU2は、先行車両に追従するように自車両10の走行を制御する。また、ECU2は、顔向きセンサ4及び車内機器5から出力された各信号値に基づいて運転者の顔向き及び車内機器5の操作状況を検出し、これらに基づいて運転者の走行に対する注意力の度合いを求め、かかる注意力の度合いに応じてACC制御の加速ゲイン値及び減速ゲイン値の少なくとも一方を変更する。よって、ACC制御の際、先行車両に対する注意力に応じて加減速勾配が制御されることとなる。
(もっと読む)
前後加速度制御装置
【課題】外乱によるフィードフォワード制御の精度低下を補完し、前後加速度制御性能を向上させる。
【解決手段】パワトレフィードフォワードトルクの信頼性が外乱要因による推定ブレーキトルクの信頼度の低下に伴って低下するため、パワトレフィードバックトルクをブレーキ信頼性を加味したパワトレトルクの信頼度に応じて補正する。また、ブレーキフィードフォワードトルクの信頼性が外乱要因による推定パワトレトルクの信頼度の低下に伴って低下するため、ブレーキフィードバックトルクをパワトレ信頼性を加味したブレーキトルクの信頼度に応じて補正する。これらにより、パワトレフィードフォワードトルクやブレーキフィードフォワードトルクの信頼性の低下分をパワトレフィードバックトルクもしくはブレーキフィードバックトルクの補正によって補完することが可能となる。
(もっと読む)
車間距離制御装置
【課題】 車速変動を低減して燃費悪化を抑制することを可能とした車間距離制御装置を提供する。
【解決手段】 レーダ11、12やカメラ21、22、車々間通信機41等で取得した隣接車線を含む他車両の状況、車線の状態といった車両の走行環境から車間制御ECU31は、先行車両と自車両との間に他車両が割り込んでくる割り込み可能性を判定し、当該割り込み可能性が低いと判定した場合には、そうでない場合に比較して先行車両との車間距離が長くなるようエンジンECU51、ブレーキECU61により、車両の加減速状態を制御する。
(もっと読む)
ドライバ状態検出装置、車載警報装置、運転支援システム
【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。このドライバ状態係数Kは、自車両に先行車両の画像を撮影する撮像手段を備えておき、その撮像手段の撮影した先行車両の画像の面積の単位時間当たりの変化度合いから算出する。
(もっと読む)
車速制限制御装置
【課題】制限車速の変化速度決定処理が走行抵抗による影響を受けることなく、制限車速変更操作に対する再現性が確保され得るようにした車速制限制御装置を提案する。
【解決手段】t1から「SET」スイッチの短時間操作を6回繰り返したことにより、制限車速指令値tLmtVSPが変更前制限車速指令値tLmtVSP (0)からPitch=「1Km/h」の小ピッチずつ6回上昇された場合の制限車速LmtVSPの変更速度を以下のように決定する。現在の制限車速指令値tLmtVSPおよび変更前制限車速指令値tLmtVSP(0)間の制限車速指令値段差ΔtLmtVSPが設定値ΔtLmtVSP(2)に到達するt2までは、制限車速LmtVSPの時間変化割合を小さなγにし、t2以降は、ΔtLmtVSP≧ΔtLmtVSP(2)であるから、LmtVSPの時間変化割合を大きなβにし、制限車速LmtVSPを実線図示のごとき速度(γ,β)制御下で変更後制限車速指令値tLmtVSP に至らしめる。
(もっと読む)
車両の定速走行装置
【課題】過給機付エンジンおよび自動変速機を搭載した車両においてオートクルーズ制御を行なう際に、車両の挙動を安定させることで車両乗員に違和感を与える事態を回避するようにする。
【解決手段】 実車速VAとオートクルーズ設定車速VSとに基づき過給機11付きのエンジン12のスロットルバルブの第1目標開度T1を設定する第1目標開度設定手段23と、第1目標開度T1が増加傾向,減少傾向或いは維持傾向にあるのかを判定する変化傾向判定手段24と、エンジン回転数NEと変化傾向判定手段23による判定結果とに応じて第1目標開度T1を補正しエンジン12のスロットルバルブの第2目標開度T2とする開度補正手段25と、第2目標開度T2に従ってスロットルバルブを制御するスロットルバルブ制御手段16と、実車速VAと第2目標開度T2とに基づいて自動変速機13を制御する変速制御手段17と備えて構成する。
(もっと読む)
車間距離制御装置
【課題】ドライバの運転暦や年齢を加味した車間距離制御を行うことで、特に初心者や高齢者にとって適切な車間距離制御を実行できるようにする。
【解決手段】前方車両と自車両との車間距離が所定の目標車間距離となるように前方車両に追従して走行可能な車間距離制御装置において、ドライバの運転暦に関する情報を取得する運転暦取得手段18と、運転暦取得手段18で得られた情報に基づいて車間距離制御に関するパラメータを補正する補正手段30とを備えるように構成する。
(もっと読む)
車両用駆動力制御装置
【課題】先行車との相対的な位置関係に基づいて車両の駆動力を制御する場合に、運転者の感覚に合った駆動力制御を行うことが可能な車両用駆動力制御装置を提供する。
【解決手段】先行車との相対的な位置関係に基づいて車両の駆動力を制御する車両用駆動力制御装置であって、前記相対的な位置関係に基づいて算出された基準駆動力(Ta)に対して、前記先行車との間の相対車速と車間時間とに基づいて応答性を考慮した補正を行い、前記補正の結果として補正駆動力(Tb)を求める補正手段を備え、前記補正駆動力(Tb)に基づいて前記駆動力を制御する。
(もっと読む)
車速制御装置
【課題】ハンドル角を検出することなく、安価な構成で定速走行制御装置や車間距離制御装置に適用可能な車速制御装置を提供する。
【解決手段】設定された目標車速Vccと実車速Vとの偏差に基づいて車両の速度を制御する車速制御装置において、車両の操舵装置に入力される操舵トルクThを検出する操舵トルク検出手段2と、操舵トルクThに基づいて目標車速の補正量Varを求める車速補正量設定手段28と、目標車速に対する加速制御ゲインGaccの補正量Garを設定する加速制御ゲイン補正量設定手段32と、補正量Varに基づいて目標車速Vccを補正するとともに補正量Garに基づいて加速制御ゲインGaccを補正する補正手段30,34とを備えるように構成する。
(もっと読む)
走行制御装置
【課題】定速走行制御と追従走行制御とを切り替える時に各制御による制御値を滑らかに推移させながらも制御性能を悪化させない走行制御装置を提供すること。
【解決手段】積分制御を含むフィードバック制御により車速Vを目標車速V*に制御する定速走行制御、及び、積分制御を含むフィードバック制御により車間距離Xを目標車間距離X*に制御する追従走行制御を有する走行制御装置100は、追従走行制御に関する制御値Vx及び定速走行制御に関する制御値V*の二つの対応する制御値を切り替えて何れか一方の制御値を出力させる制御切り替え手段SW1と、制御切り替え手段SW1が出力する制御値Vtに基づいて車輌における制駆動力を制御する制駆動力制御手段14と、制御切り替え手段SW1による切り替え時に二つの対応する制御値を等しくして走行制御を継続させる走行制御手段1と、を備える。
(もっと読む)
車両の走行制御装置
【課題】目標車間距離を設定するための目標車間距離選択スイッチを備え、設定された目標車間距離を維持するように自車両を先行車両に追従走行させる車両の走行制御装置において、先行車両との車間距離に応じて異なる、乗員の追従走行特性に対する要求を満足させる。
【解決手段】設定された目標車間距離に応じて追従ゲインを変化させるようにする。すなわち、目標車間距離が遠距離、中距離、近距離となるにしたがって、追従ゲインを高くする(ステップS4乃至S6)。
(もっと読む)
車速制御装置
【課題】簡易な構成でロックアップハンチングを抑制すること。
【解決手段】車速制御装置10は、定速走行時の目標車速を設定する目標車速設定手段1dと、走行車速を検出する車速検出手段4と、目標車速に対する走行車速の偏差と、フィードバック制御用の制御ゲイン値と、に基づいて、スロットル要求開度を算出する要求開度算出手段1aと、スロットル要求開度に基づいて、エンジン11のスロットル弁2の開度を制御するスロットル制御手段1bと、トルクコンバータ3のロックアップクラッチ3aをオン状態又はオフ状態に制御するロックアップ制御手段1cと、を備えている。要求開度算出手段1aは、ロックアップ制御手段1cによりロックアップクラッチ3aがオン状態に制御されたときと、オフ状態に制御されたときとで、制御ゲイン値を変更する。
(もっと読む)
車速制御装置
【課題】車両の加速制御時における加速の応答性を向上させること。
【解決手段】車速制御装置10は、車両の加速度を算出する加速度算出手段3aと、車両の目標加速度を設定する目標加速度設定手段3bと、目標加速度設定手段3bにより設定された目標加速度に対する、加速度算出手段3aにより算出された加速度の偏差を算出する偏差算出手段3cと、偏差算出手段3cにより算出された加速度の偏差と、所定の制御ゲイン値Gと、を乗算して求めた演算値に基づいて、スロットル要求開度を算出する要求開度算出手段3dと、要求開度算出手段3dにより算出されたスロットル要求開度に基づいて、エンジンのスロットル弁の開度を制御するスロットル制御手段4と、を備えている。車両の加速制御の開始時において、要求開度算出手段3dは、所定の制御ゲイン値Gを増加させる。
(もっと読む)
車両の自動走行制御装置
【課題】自動走行制御システムにおいて、走行路面の凹凸による走行安定性や乗り心地の悪化が問題とならない範囲内で自動走行制御を実行できるようにする。
【解決手段】車両の少なくとも1つの車輪の上下方向の振動を検出する加速度センサ43の出力信号等に基づいて路面凹凸度合を推定し、この路面凹凸度合が所定値α以上であれば、自動走行制御を禁止する。また、実車速が遅くなれば、走行安定性にさほど配慮する必要がなくなるという事情を考慮して、実車速が所定車速β以下のときには、路面凹凸度合が所定値α以上であっても、自動走行制御を禁止しないようにする。また、自動走行制御の実行中は、路面凹凸度合が大きくなるほど、自動走行制御の制御ゲインを小さくするようにする。これにより、路面凹凸度合が大きくなるほど、目標車速に対する追従性を遅くして、走行安定性や乗り心地に悪影響を及ぼす急激な加減速を避ける。
(もっと読む)
1 - 20 / 35
[ Back to top ]