
Fターム[3D246GB02]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | トラクションコントロール (359)
Fターム[3D246GB02]に分類される特許
201 - 220 / 359
走行制御装置、及び走行制御方法
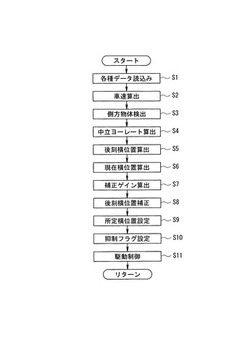
【課題】自車両の車線変更などの横移動を抑制するタイミングを最適化する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定横位置XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、走行車線に対する自車両の現在横位置Xeを検出し(ステップS6)、この現在横位置Xeが側方物体に近いほど、後刻横位置Xfが所定横位置XLに達しやすくなるように、後刻横位置Xfを補正する。すなわち、現在横位置Xeが側方物体に近づくほど、1よりも大きい値になる補正ゲインαを算出し(ステップS7)、推定した後刻横位置Xfに補正ゲインαを乗じることで、この後刻横位置Xfを補正する(ステップS8)。
(もっと読む)
車両運動制御システム

【課題】駆動力配分制御装置と制動力制御装置とを協働させる構成において、動荷重に対する駆動力配分制御装置の耐久性を維持できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、左右の駆動輪11RR、11RLに駆動力を付与すると共に左右の駆動輪11RR、11RLへの駆動力配分を制御できる駆動力配分制御装置2と、各駆動輪11RR、11RLの制動力を独立して制御できる制動力制御装置3とを備える。この車両運動制御システム1では、車両10がリバースステア状態となることが予測されるときに、駆動力配分制御装置2が駆動力配分制御を停止し、また、制動力制御装置3が制動力制御を行う。
(もっと読む)
車両運動制御システム
【課題】駆動力配分制御装置と制動力制御装置とを協働させる構成において、動荷重に対する駆動力配分制御装置の耐久性を維持できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、左右の駆動輪11RR、11RLに駆動力を付与すると共に左右の駆動輪11RR、11RLへの駆動力配分を制御できる駆動力配分制御装置2と、各駆動輪11RR、11RLの制動力を独立して制御できる制動力制御装置3とを備える。この車両運動制御システム1では、駆動力配分制御装置2と制動力制御装置3とが協働して車両運動制御を行う。また、車両10がカウンターステア状態にあるときに、駆動力配分制御装置2が駆動力配分制御を停止すると共に制動力制御装置3が制動力制御を行う。
(もっと読む)
車両のトラクション制御装置
【課題】クリープトルクに起因して駆動スリップが過大である状況に於いて、運転者により制動操作が行われる場合にも、トラクション制御を実行し、駆動輪の駆動スリップを抑制する。
【解決手段】運転者により加速操作が行われることなく(ステップ110)駆動輪にクリープトルクが作用している状況に於いて、駆動輪の駆動スリップが過大であるときには(ステップ130)、運転者により制動操作が行われていても駆動輪に制動力を付与して駆動スリップを抑制するトラクション制御を行い(ステップ180)、運転者により制動操作が行われている状況にてトラクション制御を行う場合には、駆動輪の駆動スリップ値に基づく目標制動力Fbtr1(ステップ182〜186)及び運転者による制動操作量に基づく目標制動力Fbtr2(ステップ188)のうち大きい方の値に基づいて駆動輪に付与される制動力を制御する(ステップ190、192)。
(もっと読む)
電動ディスクブレーキ
【課題】電動ディスクブレーキにおいて、パッド接触位置の検出を実行した際の運転者の違和感を軽減する。
【解決手段】車両制御コントローラ9に制御信号に基づき電動モータ26を回転させ、その回転を差動減速機構21によって減速し、ボールランプ機構20によってピストン19の直線運動に変換し、ピストン19によってブレーキパッド13A、13BをディスクロータDに押圧して制動力を発生させる。アクセルセンサ8によってアクセルペダルの戻り方向の変位を検出したき、電動モータ26の回転位置の基準となるパッド接触位置の検出を実行する。車両が減速を開始するアクセルペダルが戻され始めたときにパッド接触位置の検出を実行するので、パッド接触時の僅かな制動力の発生によって生じる運転者の違和感を軽減することができる。
(もっと読む)
ブレーキ制御装置
【課題】液圧回路とホイールシリンダとをつなぐ接続系に弾性部材要素が含まれていても、液圧制御における良好な応答性を確保可能なブレーキ制御技術を提供する。
【解決手段】ある態様のブレーキ制御装置においては、ホイールシリンダ圧のフィードバック制御に際して接続通路内の液圧剛性の変化が考慮される。ブレーキECUは、設定対象となる制御ゲインがそれぞれ異なるように構成された複数の制御マップを保持し、リニア制御弁を通過する作動液の流量に応じて対応する制御マップを参照し、フィードバック制御の制御ゲインを設定する。
(もっと読む)
車両の制駆動力制御装置
【課題】燃費や動力性能を悪化させることなく駆動スリップを的確に抑制することのできる制御装置を提供する。
【解決手段】動力源が出力したトルクを駆動輪に作用させることによりいずれかの駆動輪と路面との間に滑りが生じた場合に、その滑りが生じた駆動輪の駆動トルクを低下させて前記滑りを抑制する車両の制駆動力制御装置において、前記駆動トルクを低下させたことにより前記滑りが生じなくなったことを判定する滑り判定手段(ステップS1)と、その滑り判定手段によって前記滑りが生じなくなったことが判定された後に、前記低下させた駆動トルクを予め定めた割合で増大させるトルク制御手段(ステップS3,S6)とを備えている。
(もっと読む)
回転速度制御装置
【課題】またぎ登坂路を走行中に、回転速度差を良好に抑制可能とする。
【解決手段】左側駆動輪と右側駆動輪との間の回転速度差が開始しきい値以上になると、回転速度が大きい方の車輪の液圧ブレーキを作動させて、駆動スリップを小さくして、回転速度差を低減するブレーキLSD制御が行われる。この場合において、車両が上り坂を走行している場合(S2がYES)には、開始しきい値がそうでない場合より、小さい値とされる(S4)。またぎ登坂路の走行中において、ブレーキLSD制御が早期に開始されることになるのであり、その結果、ブレーキLSD制御において、ブレーキ力の増加勾配が小さくなるため、作動音を小さくしたり、振動を小さくしたりすることができる。
(もっと読む)
4輪駆動車両の制御システムおよび制御方法
各車軸に少なくとも1つのパワートレインを備える4輪駆動ハイブリッド車両において、第1のパワートレイン(1)が少なくとも1つの熱機関を含み、第2のパワートレイン(2)が少なくとも1つの電気機械を含む。制御システムは、摩擦ブレーキシステムと、1つのパワートレインの少なくとも1つの電気機械であって抵抗トルクを与えることができる電気機械との間でブレーキ要求を振り分ける配分手段(9)、センサからの信号に応じてブレーキシステムとパワートレインを出力先とするトルク設定値変調手段(10)、ならびにパワートレインの制御手段(8)を含み、該配分手段(9)、該トルク設定値変調手段(10)およびパワートレインの該制御手段(8)が動的に相互に作用することができ、それによって車両の安定に有利となるようにパワートレインおよび摩擦ブレーキシステムに対してトルク命令を送出する。 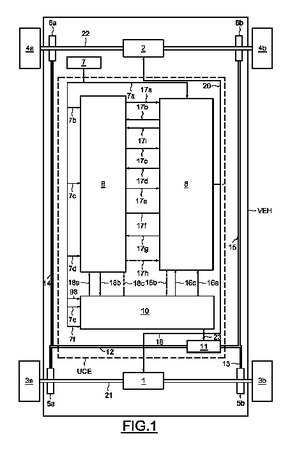 (もっと読む)
(もっと読む)
ブレーキ制御装置
【課題】ABS制御等のアプリケーションの実行時においても、ホイールシリンダ圧を目標値により正確に追従させることができるブレーキ制御技術を提供する。
【解決手段】ある態様のブレーキ制御装置においては、保持弁の上流圧のフィードバック制御に際して、各保持弁の動作状態に応じた限界勾配値が選択され、上流圧の検出値に対してフィルタリング処理が行われる。このため、各輪ごとに保持弁の開閉状態が変化される制御の実行時においても、上流圧の実際の値(実圧が)精度良く推定される。その結果、その実圧推定値をフィードバックさせることにより、各ホイールシリンダ圧をその目標ホイールシリンダ圧に正確に追従させることができる。
(もっと読む)
車両のトラクション制御装置、及び車両のトラクション制御方法
【課題】車両の運転手による操作の簡易化を図りつつ、スリップ状態にある駆動輪に対して適切に制動力を付与できる車両のトラクション制御装置、及び車両のトラクション制御方法を提供する。
【解決手段】制動ECUは、運転手の要求に基づきエンジンから車輪に伝達される駆動力DWを演算し(ステップS11)、各車輪のスリップ量Slpを演算する(ステップS12,S13,S14)。続いて、制動ECUは、制動制御開始閾値KBPを上記駆動力DWが大きいほど小さな値に設定する(ステップS15)。そして、制動ECUは、演算したスリップ量Slpが、設定した制動制御開始閾値KBP以上であった場合(ステップS21が肯定判定)、車輪に制動力を付与する制動トラクション制御を実行する(ステップS22)。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】システムオフ時に内燃機関の運転を停止する際に車両が移動するのを抑止する。
【解決手段】制動要求フラグFが値1のとき(S210)ときには、エンジンの停止に伴って遊星歯車機構を介して駆動軸としてのリングギヤ軸に作用するトルクによって車両が移動するおそれがあり車輪に制動力を付与する必要があると判断し、経過時間tの計測を開始し(S220)、経過時間tに基づいてブレーキトルクTb*を設定すると共に、設定されたブレーキトルクTb*に基づく制動力が出力されるようブレーキアクチュエータを制御する処理を、経過時間tの計測を開始してから所定時間trefが経過するまで実行する(S230〜S250)。これにより、システムオフに伴ってモータを制御することができない状態となっても、エンジンの運転を停止する際に車両が移動することを抑制することができる。
(もっと読む)
車両の走行制御装置
【課題】複数の制御モードを有する車両挙動制御に対し、クルーズ制御において、演算を複雑にすることなく車両挙動制御で選択された車両挙動特性に適合する出力特性を得ることができ、良好なドライバビリティを得る。
【解決手段】車両挙動制御部1は、ABS制御と横滑り防止制御とトラクション制御の全てを実行する通常モードと、ABS制御と制限した横滑り防止制御とトラクション制御を実行するトラクションモードと、ABS制御のみを実行するOFFモードの3つのモードが設定されており、モード切換スイッチ14でドライバにより選択される。一方、クルーズ制御部2には、モード切換スイッチ14に応じたそれぞれのモードに対応する上限ガード値が設定されており、クルーズ制御時は、この上限ガード値で目標車速を制限することで、通常運転時の車両挙動制御のモードに適合する出力特性を設定する。
(もっと読む)
ブレーキ装置およびブレーキ装置の作動方法
ブレーキ装置の制御方法は、
ブレーキ装置によるブレーキ作用を設定するためのブレーキ信号を受け取るステップと、
前記ブレーキ作用を所定の応答時間内に与えるための、ブレーキ装置内の圧力上昇の最小速度を決定するステップと、および
ブレーキ装置内の圧力が前記最小速度で上昇するようにブレーキ装置のポンプのポンプ能力を設定するステップと、を使用する。
(もっと読む)
車両停止保持装置
【課題】制動力保持機能を備えた車両が、滑り易い道路を発進する場合を想定し、運転者の操舵操作を補助して車両姿勢の立直しを確実に図ることを可能とした車両停止保持装置を提案する。
【解決手段】ブレーキペダルの踏込の操作後、当該踏込操作が解除されたときに車輪の制動力を保持可能とする制動力保持手段を有している車両停止保持装置において、前記制動力保持手段が起動しているときに、走行路に対する車両の移動の有無を検出する移動検出手段と、前記車両の操舵角を検出する操舵角検出手段を含み、前記移動検出手段が車両の移動を検出したときに、運転者による操舵操作に応じて車両のヨー挙動を制御するヨー挙動制御手段とを備える。運転者によるステアリング操作を積極的にアシストするので、車両が滑り易い道路に停車した後に発進するときに発生する滑りに対して有効に対処しながら車両姿勢を修正できる。
(もっと読む)
車線変更支援装置
【課題】
従来の車線変更支援装置では、白線情報を自車と周囲車両の相対情報を算出するために用いているのみであり、道路情報から自車の車線変更支援をして良い場所か否かを判断していない。そのため、車線変更が法律で禁止されている隣車線への車線変更を支援したり、これ以上速度を出すと危険なカーブ曲率の大きい道路で加速制御をしてしまう、いう課題があった。
【解決手段】
車線変更支援装置は、車線変更を支援する機能を許可する第1の制御モードと、車線変更を支援する機能を禁止する第2の制御モードと、自車が走行する道路情報を取得する道路情報取得部と、自車と周囲車両との相対情報を取得する相対情報取得部と、前記道路取得部が取得した道路情報に基づいて制御モードを選択する選択部と、前記相対情報取得部が取得した相対情報及び前記選択部が選択した制御モードに基づいて自車を制御する制御部と、を備える。
(もっと読む)
車両重量推定方法および装置ならびに車両走行制御装置
【課題】車両が走行している路面の勾配のいかんを問わず、簡単にかつ精度良く車両重量を推定し得るようにする。
【解決手段】車両が、設定速度以上で惰性走行しており(S1,S2の判定がYES)、かつ、通常路を直進しているときに(S3,S4の判定がYES)、その車両の前後方向の減速度を加速度センサにより検出(S5)し、その検出した減速度である検出減速度に基づいて車両重量を複数段階で推定する(S6〜S10)。路面の勾配いかんを問わず車両重量を精度良く推定することができる。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】緩制動時においても操舵に対するヨーレートの応答の予測が容易なヨーイングモーメント制御を行う車両挙動制御装置および車両挙動制御方法の提供。
【解決手段】制御ゲイン設定手段が、車両の車両前後加速度に基づいてヨーイングモーメント制御における制御量を決定する制御ゲインを設定するときは、前記前後加速度が所定値よりも小さい領域(緩制動時:低G領域)では、前記前後加速度がほぼ零のとき(非制動時)に対してその制御ゲインを小さく設定する。これにより、緩制動時の操舵に対するヨーレートの応答が非制動時や高G領域とほぼ同じになるため、回避操作を行ったときのヨーレートの応答の予測が容易なヨーイングモーメント制御が可能となる。
(もっと読む)
車両の運動制御装置
【課題】車両安定化制御又はスリップ抑制制御により車輪制動力を制御する車両の運動制御装置において、車輪の横力を考慮して、車両の旋回半径の増大を抑制すること。
【解決手段】車両の運動状態量に基づく車両安定化制御、又は車輪速度に基づくスリップ抑制制御により車輪制動力が制御される。少なくとも路面摩擦係数に基づいて旋回半径の増大抑制のために確保すべき横力(横力規範値Fyk)が演算され、横力実際値Fyaが取得される。Fya>Fykの場合(点Xに対応)、即ち、旋回半径の増大抑制のために確保すべき横力が既に確保されている場合、制動力が偏差ΔFy(=Fya−Fyk)に応じて調整されない。一方、Fya<Fykの場合(点Yに対応)、即ち、旋回半径の増大抑制のために確保すべき横力が確保されていない場合、偏差ΔFyに応じて制動力が減少するように調整される。この結果、横力が増大し、旋回半径の増大が抑制される。
(もっと読む)
駆動力制御装置
【課題】車輪にブレーキトルクを与える場合に、加速性が低下することを抑制できる駆動力制御装置を提供する。
【解決手段】車両の左右または前後に配置された第1の車輪および第2の車輪と、第1の車輪および第2の車輪にトルクを伝達する駆動力源と、第1の車輪および第2の車輪にブレーキトルクを与える制動装置とを有し、第1の車輪と路面との間で生じる駆動トルクおよび第1の車輪に与えるブレーキトルクと、第2の車輪と路面との間で生じる駆動トルクおよび第2の車輪に与えるブレーキトルクとを、個別に変更できる駆動力制御装置において、スリップ量が大きい方の車輪で生じる駆動トルクの最大値と、スリップ量が小さい方の車輪の駆動トルクの最大値との差を求める算出手段(ステップS5,S6)と、駆動トルクの最大値同士の差に基づいて、スリップ量が大きい方の車輪に与えるブレーキトルクを制御するブレーキトルク制御手段(ステップS7,S8)とを備えている。
(もっと読む)
201 - 220 / 359
[ Back to top ]