
Fターム[3D246GB02]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | トラクションコントロール (359)
Fターム[3D246GB02]に分類される特許
141 - 160 / 359
車両の制御装置
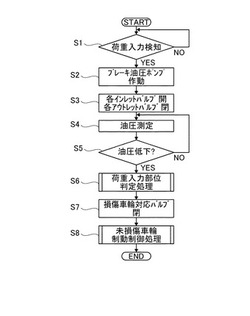
【課題】車両への荷重入力により制動手段に不具合が生じたときであっても、ブレーキ油の漏れを防止すると共に、車両に適切な制動力を付与することができる車両の制御装置を提供すること。
【解決手段】加速度検出手段(第1,第2前後Gセンサ、第1,第2左右Gセンサ)11〜14により検出された加速度が予め定めた閾値を超えると共に、方向変更検出手段(ヨーレートセンサ)15により車両2の進行方向の変更が検出されたとき、制動手段20を作動して車輪FL,FR,RL,RRごとに制動力を付与することで車両2を減速させる車両挙動制御手段(図3)を備えた車両の制御装置であって、車両挙動制御手段(図3)は、制動手段20が作動中に、ブレーキ配管26a,26b内の圧力低下を検出したとき、車両2に作用する加速度方向を判定する加速度方向判定手段(ステップS6,図4A及び図4B)により得られた加速度入力方向に位置する車輪に対応したブレーキバルブを作動してブレーキ油の流動を遮断する。
(もっと読む)
ハイブリッド車両の制御装置

【課題】エンジンは停止するものの、動作保証ができる状況でのみ制御を行うようにしたハイブリッド車両の制御装置を提供する。
【解決手段】エンジン2およびエンジン2に直結されたモータジェネレータ3を車両の駆動源とし、モータジェネレータ3は発電可能であり、モータジェネレータ3で発電した電気を蓄電する高圧バッテリ4と、エンジン2を制御するエンジン制御ECU10と、エンジン2以外の車載機器を制御する車載制御装置と、を備えるハイブリッド車両1の制御装置において、エンジン2が作動中であるか、または高圧バッテリ4の残容量が高残容量値以上であるかの少なくとも一方の条件が満たされているときに、前記車載制御装置の作動が許可されることを特徴とするハイブリッド車両の制御装置である。
(もっと読む)
車両制御装置
【課題】車両総重量や車両重心位置の変化に対応させた適切な車両挙動制御を行うこと。
【解決手段】設定した目標制御量又は/及び目標制御タイミングで車両10の挙動制御を行う車両制御装置において、車両総重量を推定又は検出する重量演算手段1eと、車両重心位置を推定又は検出する重心位置演算手段1dと、車両10の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段1cと、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた旋回特性指数値とに基づいて車両10が所望の旋回姿勢となる目標制御量又は/及び目標制御タイミングを設定する旋回制御手段1bと、を設けること。
(もっと読む)
車両の運動制御装置
【課題】
運転者への違和感を抑制できる予備制御により、ブレーキアクチュエータの応答性を補償し、確実な車両安定性制御を実行できる車両の運動制御装置を提供する。
【解決手段】
実際の旋回状態量に基づいて第1状態量を演算し、この第1状態量に基づいて車両のオーバステア傾向を識別し、オーバステア傾向を抑制する車両安定性制御を実行する。さらに、車両の実旋回状態量に基づいて第1状態量とは異なる第2状態量を演算し、この第2状態量に基づいて車両のオーバステア傾向を識別し、車両安定性制御の応答性を補償する予備制御を行う。第2状態量は、第1状態量に比較して、相対的に速い車両のヨーイング運動を識別する。
(もっと読む)
車両の制御システム
【課題】 モータ回路の過熱保護のために操舵アシストを制限する必要があるときには、運転者に対して電動モータ20が過負荷となるような操舵操作を抑制させる。
【解決手段】 モータ温度Tが第1基準温度T1を越えた場合に、報知器54,55の報知開始閾値を低減する。これにより、車両の横滑りあるいは駆動輪のスリップに対して、早めに報知器54,55が作動する。運転者は車両の走行状態が車両限界に近いものと思い、自然に運転を抑制する。モータ温度Tが第2基準温度T2(>T1)を越えた場合に、スキッド制御の制御開始閾値を低減する。これにより、車両の横滑りあるいは駆動輪のスリップに対して、早めにスキッド制御が開始され、車速が上がりにくくなり操舵速度が低下して電動モータ20の負荷が軽くなる。
(もっと読む)
車両の運動制御装置
【課題】
運転者への違和感となる不必要な予圧制御(予備制御)を抑制する。
【解決手段】
車輪の制動トルクを制御する制動手段と、車両の操舵角速度を取得する操舵角速度取得手段と、操舵角速度取得手段の取得する操舵角速度に基づいて基準横加速度を決定する決定手段と、車両の実横加速度を取得する実横加速度取得手段とを備える。決定手段は、操舵角速度が大きいほど基準横加速度を小さい値に決定し、或いは、操舵角速度が小さいほど基準横加速度を大きい値に決定する。実横加速度取得手段が取得する実横加速度が基準横加速度を超えたときに、制動手段を介して車輪への制動トルク付与を開始する。
(もっと読む)
車両の運動制御装置
【課題】
運転者への違和感を抑制できる予備制御により、ブレーキアクチュエータの応答性を補償し、確実な車両安定性制御を実行できる車両の運動制御装置を提供する。
【解決手段】
車両の操舵角速度を取得する操舵角速度取得手段と、車両のヨー角加速度を取得するヨー角加速度取得手段とを備え、操舵角速度dSaの大きさが第1所定値より大きく、且つ、ヨー角加速度の大きさが第2所定値よりも大きいときに、車輪に制動トルクの付与を行う。
(もっと読む)
車両の運動制御装置
【課題】
複数の状態量間の位相差を補償し、車両のヨーイング運動、及び/又は、ローリング運動における安定性を維持し得る車両の運動制御装置を提供する。
【解決手段】
車両の操舵角速度を取得する操舵角速度取得手段と、操舵角速度に基づいて最大操舵角速度を演算する最大操舵角速度演算手段と、最大操舵角速度に基づいて基準旋回状態量を決定する決定手段と、車両の実旋回状態量を取得する実旋回状態量取得手段と、基準旋回状態量、及び、実旋回状態量に基づいて制動トルクを制御する制御手段とを備える。制御手段は、実横加速度が基準横加速度を超えたときに、車輪への制動トルク付与を行う。
(もっと読む)
先進型滑り防止機構制動及び駆動力制御の装置及び方法
【課題】車輪又はディスク・ブレーキ・ロータの表面パターンにも、ABS及び/又はTCシステムに帰還を与える従来の速度センサにも頼らないディスク・ブレーキ・システムを提供する。
【解決手段】ディスク・ブレーキ・システムが、磁化部分を符号化して有する磁気的に符号化されたディスク・ブレーキ・ロータと、複数のディスク・ブレーキ・パッドを含むディスク・ブレーキ・キャリパとを含み、ディスク・ブレーキ・パッドは、ディスク・ブレーキ・ロータに隣接配置され、ディスク・ブレーキ・キャリパの動作時にディスク・ブレーキ・ロータと摩擦係合する。ディスク・ブレーキ・システムは、ディスク・ブレーキ・ロータに近接して装着され、磁場を検出する磁場センサと、磁場センサからの信号を受け取る制御器とを含んでいる。制御器は、磁場センサから受け取った信号に基づいてディスク・ブレーキ・キャリパの選択的動作を可能にする。
(もっと読む)
電磁弁
【課題】軸長の長さを抑制することができる電磁弁を提供する。
【解決手段】筒状の第1外周壁25aと、第1外周壁25aの開口端の一端を閉塞し弁体24の一端側と当接する所定口径の第1オリフィス25bが形成された第1当接部25cとを有する第1部材25と、第1部材25の第1外周壁25aに囲繞され、第1当接部25cと対向する位置に設けられた、第1オリフィス25bより大口径の第2オリフィス30aが形成された第2当接部30bを有する第2部材30とを設け、電磁弁1の軸方向長さを抑制することができる。
(もっと読む)
電磁弁
【課題】コストの抑制をすることができる電磁弁を提供すること。
【解決手段】通電時に磁界を発生するコイル22を有するソレノイド21と、コイル22の内周に配置された非磁性体のバルブボディ23と、バルブボディ23内に設けられ、コイル22に通電したときの吸引力によりバルブボディ23に対して軸方向に沿って移動し、流路を開閉するアーマチュア24と、アーマチュア24と当接してオリフィス30aを閉塞する当接部30bを有する樹脂製の樹脂部材30と、アーマチュア24を当接部30bに向けて付勢するコイルスプリング28とを備えた。
(もっと読む)
車両運動制御システム
【課題】ABS制御時にて車両の運動を安定化できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、ABS制御時にて車輪11RR、11RLの制動圧を減圧させたとき又は減圧後に制動圧を保持しているときに、この車輪の制動圧の増圧勾配を通常時よりも大きく設定する急増圧制御を行う。左右の車輪11RR、11RLの双方にて接地荷重低下が発生しているときには、左右の車輪11RR、11RLの双方にて急増圧制御が行われる。また、左右の車輪11RR、11RLのうちの一方の車輪11RRにて接地圧低下が発生していると共に他方の車輪11RLにて接地圧低下が発生していないときには、左右の車輪11RR、11RLの双方にて急増圧制御が禁止される。
(もっと読む)
車両の制振制御装置
【課題】 車両の制振制御等に於いて、参照される車輪トルクを推定する際にその推定が良好に実行できない事情を考慮して制御を実行すること。
【解決手段】 本発明の車両の駆動力を制御することにより車両のピッチ又はバウンス振動を抑制する制振制御装置は、車輪と路面との接地個所に於いて発生する車輪に作用する車輪トルク推定値を取得する車輪トルク推定値取得部と、車輪トルク推定値に基づいてピッチ又はバウンス振動振幅を抑制するよう車両の駆動力を制御する駆動力制御部とを含み、更に、車輪のスリップ状態を示す車輪スリップ状態量の表すスリップの程度が所定の程度より大きいとき又は車両が後退しているときには車輪トルク推定値に基づく駆動力の制御を中止することを特徴とする。
(もっと読む)
ブレーキ制御装置
【課題】回生制動により回収される過大なエネルギーがバッテリに与える負荷を軽減する技術を提供する。
【解決手段】ブレーキ制御装置において、回生ブレーキは、電動機による回生制動力を車両に設けられた車輪に付与する。制御装置は、車両制御のために目標となる目標総制動力を算出し、該目標総制動力を満たすように回生ブレーキにより発生させる目標回生制動力を決定するとともに該目標総制動力の不足分を満たすように液圧ブレーキにより発生させる目標液圧制動力を決定し、目標回生制動力および目標液圧制動力に応じて回生ブレーキと液圧ブレーキとを協調制御する。制御装置は、目標回生制動力が所定値より大きい場合、該目標回生制動力を低減した低減回生制動力に応じて回生ブレーキを制御する。制御装置は、低減された目標回生制動力を補うように目標液圧制動力を増大させた増大目標液圧制動力に応じて液圧ブレーキを制御する。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】路面摩擦係数に対して高い精度で推定対象の値を得る。
【解決手段】車両接地面摩擦状態推定装置は、基準路面摩擦係数とは異なる路面摩擦係数μ1及び該基準路面摩擦係数とは異なる路面摩擦係数μ1の路面でのスリップ角βt1を入力とし、入力されたスリップ角βt1に、基準路面摩擦係数μ0を路面摩擦係数μ1で除した値(μ0/μ1)を掛け算して基準路面でのスリップ角βt0を得て、基準路面摩擦係数の基準路面で得られるタイヤ力とスリップ度との相関関係で成立するタイヤ特性をモデル化したタイヤモデルに従い、掛け算して得た基準路面でのスリップ角βt0に対応する基準路面での横力Fy0を得て、その得た基準路面での横力Fy0に、路面摩擦係数μ1を基準路面摩擦係数μ0で除した値を掛け算して路面摩擦係数μ1の路面での横力Fy1を得る。
(もっと読む)
車両用走行制御装置及びその方法
【課題】車線逸脱防止制御が作動し、かつ4WD状態になっている場合に、それら車線逸脱防止制御の作動及び4WD状態を適切に終了させる。
【解決手段】車両用走行制御装置は、制駆動力を制御して自車両にヨーモーメントを付与し走行車線に対する自車両の逸脱を防止する車線逸脱防止制御が作動し、かつ前後輪の駆動トルクを制御する4WD制御が作動している場合において(ステップS51、ステップS52)、車線逸脱防止制御の作動が終了し、かつ4WD制御の作動が終了するときには、それら終了が同時になされることを禁止する(ステップS53〜ステップS56)。
(もっと読む)
車両の運動制御装置
【課題】操舵角制御と制動力制御とを組み合わせて旋回操作時における車両の運動制御を行う運動制御装置において、通常時には操舵角制御を反映した実際のタイヤ切れ角に基づいた制動力制御を行う一方、オーバーステア発生時にはタイヤ切れ角の変化が不連続になることによる制動力制御の制御性の悪化を抑制し、或いは、制動力制御に用いる操舵角信号を車両状態に応じて使い分けて、状況に応じた制動力制御の制御性を確保する。
【解決手段】実旋回制御量が目標旋回制御量となるように操舵輪FL,FRの操舵角を制御する操舵制御ECU20と、実旋回制御量が目標旋回制御量となるように車両制動力を制御する制動及びエンジン制御ECU30とを備え、操舵制御ECUが車両オーバーステア時に補正するオーバーステア時操舵角補正量を、制動及びエンジン制御ECUが車両制動力の制御に用いる操舵角信号に反映させないように構成されていることを特徴とする。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】制御基板に対してコイル組立体を安定させるとともに、ハウジングを小型化することができ、さらに、コイル組立体の組み付け性を向上させることができる車両用ブレーキ液圧制御装置を提供する。
【解決手段】車両用ブレーキ液圧制御装置であって、基体と、基体の一面に取り付けられる電磁弁と、電磁弁を取り囲むコイル組立体V1と、基体の一面に固着され、電磁弁及びコイル組立体V1を覆うハウジングと、ハウジング内に配設され、コイル組立体V1への通電を制御して電磁弁の開閉動作を制御する制御基板と、を備え、ハウジング内に形成された仕切壁部の基体側の面には、コイル組立体V1の側部に係合する爪部51が形成された複数の支持部50・・・が突設されており、各支持部50・・・は、コイル組立体V1の一方の側部と他方の側部にそれぞれ係合されている。
(もっと読む)
車両の運動制御装置
【課題】操舵角制御と制動力制御とを組み合わせて旋回操作時における車両の運動制御を行う運動制御装置において、オーバーステア発生時における車両の挙動を好適に安定化させるとともに、オーバーステアの限界領域でドライバに違和感を及ぼすことを抑制し、また、制動力制御を終える際の制御の収束性を高めることができるようにする。
【解決手段】実旋回制御量が目標旋回制御量となるように操舵輪FL,FRの操舵角を制御する操舵制御ECU20と、実旋回制御量が目標旋回制御量となるように車両制動力を制御する制動及びエンジン制御ECU30と、を備えた車両の運動制御装置であって、制動及びエンジン制御ECUが車両のオーバーステア状態を検知して制動力制御を開始するタイミングを検出したことに基づいて、操舵制御ECUの制御が中止される、ことを特徴とする。
(もっと読む)
車両用運動制御装置
【課題】車両の安定性を確保しながら的確に障害物を回避する。
【解決手段】各タイヤの実際のタイヤ力を検出するタイヤ力検出手段(20)と、障害物との衝突を回避するために各タイヤの目標制動力を設定する制動制御目標制動力設定手段(S105)と、目標制動力の下で各タイヤの制動力を制御する制動制御手段(S110)と、各タイヤの制動力を制御した後に、該制動力の制御に続いて左右のタイヤの制動力の差によって車両を旋回させる回頭制御手段(S112-S122)と、車両の旋回方向を決定する障害物回避方向決定手段(S113,S121,S122)と、回頭制御手段(S112-S122)による各タイヤの制動制御の目標制動力を設定する回頭制御目標制動力設定手段(S118,S115)とを有する。
(もっと読む)
141 - 160 / 359
[ Back to top ]