
Fターム[3D246GB23]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 路面状況対応 (331) | 路面傾斜 (147) | 下り坂 (40)
Fターム[3D246GB23]に分類される特許
1 - 20 / 40
電動パーキングブレーキ装置
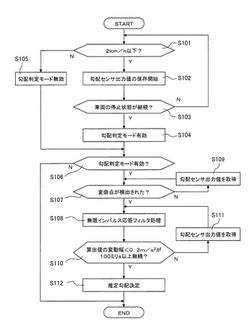
【課題】路面の勾配に応じた荷重の目標値を短時間で決定可能な電動パーキングブレーキ装置を提供する。
【解決手段】電動パーキングブレーキ装置は、パーキングブレーキと、アクチュエータと、勾配センサと、荷重センサと、制御部と、を有している。制御部は、アクチュエータ目標荷重値を決定する荷重値決定と荷重センサの出力に基づいてアクチュエータによる荷重がアクチュエータ目標荷重値まで到達するようにアクチュエータを制御する駆動制御とを行う。制御部は、荷重値決定において、勾配センサからの勾配値の時系列における変曲点を判定し、変曲点以降の勾配値の時系列と予め定められたフィルタ係数とに基づいて、勾配値の収束値を推定することにより推定勾配を算出するフィルタ処理を行い、推定勾配に基づいてアクチュエータ目標荷重値を決定する。
(もっと読む)
車両のエンジン自動停止制御装置

【課題】 走行中においても適切なエンジン停止及び再始動を達成可能な車両のエンジン自動停止制御装置を提供すること。
【解決手段】 本発明の車両のエンジン自動停止制御装置では、走行中に運転者がブレーキペダルを所定の閾値以上操作したときにエンジンを停止するにあたり路面摩擦係数が小さいほど所定の閾値を大きくすることとした。
(もっと読む)
車両用制動支援装置
【課題】坂路にて自車両の停止中に自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止する。
【解決手段】車両用衝突回避制動支援装置1は、障害物との接近に関するリスクポテンシャルを算出するリスクポテンシャル演算部31と、走行路の勾配を検出する外乱推定部32と、自車両が停止中に、リスクポテンシャルに基づき自車両に付与した制動力を解除する際のその減少度合いを、リスクポテンシャル及び走行路の勾配に基づいて変更する制動力演算部40とを備える。
(もっと読む)
前後加速度推定装置
【課題】車両の前後加速度又は路面摩擦係数若しくは路面状態の推定精度を向上させることが可能な前後加速度推定装置を提供する。
【解決手段】前後加速度推定装置22は、加速操作又は減速操作の開始時点における前後加速度センサ42の検出値と、その後の前後加速度センサ42の検出値との差を、車両10の前後加速度の推定値として算出する加速度推定手段110を有する。
(もっと読む)
車両の停止制御装置
【課題】自動的に停止・再始動される内燃機関と、内燃機関の停止中に車両を自動的に制動する制動装置を有する場合において、それらを適切に制御することにより、車両の円滑な発進と燃費の向上を実現できる車両の停止制御装置を提供する。
【解決手段】車両Vは、アイドルストップが行われるエンジン3と、アイドルストップ中に作動し、車両Vを制動するパーキングブレーキ60を有している。停止制御装置1によれば、アイドルストップ中に検出された路面の勾配に応じて、再始動時目標回転数NECMDRSTおよびブレーキ解除時間TBRKOFFを設定し、エンジン3が再始動される際に、エンジン回転数NEが再始動時目標回転数NECMDRSTになるようにエンジン3の出力を制御するとともに、再始動時制御の開始時から解除終了時間TBRKOFFが経過したときに、パーキングブレーキ60による制動を解除する。
(もっと読む)
車両の運転支援制御装置
【課題】ドライバに対して的確なロードインフォメーションを伝達しつつ、降坂時定速走行制御を変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を選択した際には、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、降板走行を設定速Vhdcで走行するのに制動力が不足するか否かを判定し、制動力が不足すると判定した場合には、不足する前後輪の制動力Fbrkf、Fbrkrを、車輪の接地荷重配分に応じて設定し、ブレーキ制御部32に出力する。また、制動力が不足する場合と制動力が十分な場合とで前後軸間の駆動力配分を車輪の接地荷重配分に応じて略同一になるように設定し、前後駆動力配分制御部31に出力する。
(もっと読む)
自動車
【課題】坂道の発進の際に車両のずり下がりを抑制しつつ、シフトポジションがニュートラルポジションとされたときに運転者が予期するよう車両を動作させて運転者に違和感を与えないようにする。
【解決手段】停車したときや停車中にシフトレバーが操作された際、シフトポジションSPが前進用ポジション(D,B)のときには、前方に上り勾配のときにだけ制動力保持制御を許可し、それ以外のときには制動力保持制御を禁止し、シフトポジションSPが後進用ポジション(R)のときには、前方に下り勾配のときにだけ制動力保持制御を許可し、それ以外のときには制動力保持制御を禁止し、シフトポジションSPがニュートラルポジション(N)のときには、勾配に拘わらずに制動力保持制御の実行を禁止する。
(もっと読む)
車両の制動力保持制御装置
【課題】車両発進時の異音の発生を抑制することができる車両の制動力保持制御装置を提供すること。
【解決手段】マスタシリンダ5とホイールシリンダ6とを接続するブレーキ液圧通路7に電磁弁8を設け、車両停止時に前記電磁弁8を閉状態としてホイールシリンダ6側のブレーキ液圧通路7に所定のブレーキ液圧を保持して車両の移動を阻止する車両の制動力保持制御装置において、車両停止時にホイールシリンダ6側のブレーキ液圧通路7に保持されているブレーキ液圧を、ブレーキペダル3を開放した時点で前記電磁弁8を所定の第1開度まで開くことによって所定の維持圧まで下げる1次減圧制御を行う。又、前記維持圧を路面の傾斜に関わらず車両の停止が維持されるに必要十分な値に設定する。
(もっと読む)
坂道発進補助制御装置
【課題】坂道発進補助制御が無用に解除されることを防止できる坂道発進補助制御装置を提供する。
【解決手段】車両が登坂路で停止状態であるときにドライバーがブレーキペダルから足を放しても車両が後退しないように制御する後退防止制御部(S1)と、駆動輪に伝達される駆動トルクを、モータージェネレーターと駆動輪との間に配置される駆動輪側クラッチが解放され始めてから再び締結されて所定時間が経過するまでは駆動輪側クラッチの伝達トルクと変速機への入力トルクとのいずれか小さいトルクに基づいて推定し、所定時間が経過した後は変速機への入力トルクに基づいて推定するトルク推定部(S7,S8)と、推定された駆動トルクが後退防止判定値よりも大きいか否かを判定する判定部(S9)と、推定された駆動トルクが後退防止判定値よりも大きいときには後退防止制御部による制御の中止を許可する後退防止制御中止部(S10)と、を備える。
(もっと読む)
ブレーキ制御装置
【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
車両の制御装置
【課題】坂路で車両を停止させる際、制動装置を制御するソレノイドバルブの作動回数を抑制すると共に、車両の移動を抑制することができる車両の制御装置を提供する。
【解決手段】坂路においてブレーキペダル36の踏み込みが解除されても、制動手段100によって車速Vの上昇が制限されるため、規定時間Ta内ではパーキングロック可能な車速Vに制限される。したがって、パーキングレンジが選択された際に、ブレーキ油圧Pbkを制御するソレノイドバルブ50を再度作動させることが防止され、ソレノイドバルブ50の作動回数増加による耐久性低下が抑制される。また、ブレーキペダル36の踏み込みが解除されると、ホイールブレーキ46のブレーキ油圧Pbkが急激に低下せず、所定の勾配ΔPで低下するに従い制動力が発生するため、その車両の移動が抑制される。
(もっと読む)
作業用車両の走行装置
【課題】蓄電装置の過充電を防止すると共に、主ブレーキ装置の過熱による破損やブレーキ力不足の発生を防止し、減速時に十分なブレーキ力を確保しかつ燃費改善も十分に図る。
【解決手段】減速走行時には、それ以外の走行時よりもHSTの油圧モータの容量を増加又は油圧ポンプの容量を減少させ(S6)、この状態で車両の運動エネルギーをHSTを介して回生する。減速走行時でかつ蓄電装置の蓄電量が設定値より小さい場合には、回生したエネルギーにより発電・電動機を発電機として動作させて発電し(S11)、この発電した電力を蓄電装置に蓄電し、このとき補助ブレーキ装置が動作中であれば、発電量の増加に応じて補助ブレーキ装置のブレーキ力を減じるかオフとする(S8)。減速走行時でかつ蓄電装置の蓄電量が設定値より大きい場合には、回生したエネルギーによる発電・電動機の発電動作をオフとし(S13)、補助ブレーキ装置を作動させる(S12)。
(もっと読む)
車両用運動制御装置
【課題】ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行う車両用運動制御装置を提供する。
【解決手段】ステアリング制御とブレーキ制御のいずれをメインに行うかを選択し、その選択結果に基づいて、メインとされる側に対して行わせる車両旋回運動の要求値を出力すると共に、メインとされない側に目標値とメイン側要求値との差に応じた要求値を出力することで、ステアリング制御とブレーキ制御それぞれの配分を適切に設定する。これにより、ステアリング制御をメインとしつつブレーキ制御による補助を行うことが可能となるため、ステアリング制御のみの場合よりも目標値追従性を向上させた車両運動制御が行える。そして、ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行うことが可能となる。
(もっと読む)
車両の制御方法及び車両の制御装置
【課題】車両の停止時に該車両からの作動音の発生を抑制できる車両の制御方法及び車両の制御装置を提供する。
【解決手段】運転手によるブレーキペダルの操作によって車両が停止する場合、ブレーキ用ECUは、車両が停止する前に、自動変速機の入力クラッチを作動させてエンジンから後輪への動力伝達効率を低減させる(第4のタイミングt24)。その後、運転手によるブレーキペダルの操作によって車両が停止した場合、ブレーキ用ECUは、各リニア電磁弁に対する電流値Islを調整して車両に対する制動力を保持させる(第5のタイミングt25)。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車両用制動システム
【課題】 サービスブレーキのフェードやベーパロックを抑制した車両用制動システムを提供する。
【解決手段】 制動ECU41は、ステップS17で降坂フラグFaとフェードフラグFbとの少なくとも一方が1であるか否かを判定し、この判定がYesであればステップS18でフェード抑制処理を実行する。次に、制動ECU41は、ステップS19で加圧フラグFcが1であるか否かを判定し、この判定がYesであればステップS20で加圧処理を実行する。次に、制動ECU41は、ステップS21で加圧フラグFcが1であるか否かを判定し、この判定がYesであればステップS22で高G制動処理を実行する。
(もっと読む)
遠心力拡張式ブレーキ装置
【課題】回転数に応じて車輪に円滑かつ確実に制動力を付与することができる安全で省スペースな遠心力拡張式ブレーキ装置を提供することを解決すべき課題とする。
【解決手段】車輪20が回転するとリングギヤ34とピニオン30との噛合によりピニオン30に連結された保持部材41が増速回転され、保持部材41に支承された揺動部材43が弾性部材45の弾性力に抗して遠心力で外方に揺動される。これにより、車輪20を回転可能に支承する軸部材16に固定された支持部材31に固着されたブレーキドラム40の内周面に揺動部材43が摩擦部材46を介在した状態で押圧され、ピニオン30、リングギヤ34を介して車輪20に制動力が付与される。
(もっと読む)
車両用ブレーキ装置
【課題】電気作動式駐車ブレーキ駆動手段を備える車両用ブレーキ装置において、電気作動式駐車ブレーキ駆動手段を作動させるのに運転者の煩わしい操作を不要としつつ、その作動頻度を低減し、ノイズの発生を抑えるとともに耐久性の向上に寄与する。
【解決手段】運転者のブレーキ操作に対応して液圧発生手段Mから液圧作動式の車輪ブレーキ2B,2Dに出力されるブレーキ液圧を検出するブレーキ液圧センサ15A,15Bを含み、コントローラCは、ブレーキ液圧センサ15A,15Bで検出されるブレーキ液圧が車両の停止状態で基準値を超えるのに応じて電気作動式駐車ブレーキ駆動手段24A,24Bの通電を開始し、且つこの通電開始時の電気作動式駐車ブレーキ駆動手段24A,24Bの作動量の時間変化率が、その作動量が目標作動量に達するときの作動量の時間変化率よりも小さくなるように、該電気作動式駐車ブレーキ駆動手段の通電を制御する。
(もっと読む)
車両の自動フリーホイーリング機能を制御する方法及び装置
本発明は、現行のフリーホイーリング状態によりフリーホイーリング機能が起動される車両の自動フリーホイーリング機能を制御する方法及び装置であって、制御ユニットは、前記車両が間もなく、現行の下り坂と比較して更に険しい下り坂(図2の位置Bの下)を走行することを予測し、前記車両が前記更に険しい下り坂に入る前に前記フリーホイーリング機能の作動が位置D(位置Bの上)で停止した場合、前記車両が前記フリーホイーリング機能の作動状態で前記更に険しい下り坂に入った場合と比較して、燃料消費がより少ないか否かをシミュレートし、前記シミュレーションによってより少ない燃料が消費されることが示された場合は、フリーホイーリング機能の作動は前記位置Dで、すなわち前記車両が前記更に険しい下り坂に入る前に停止するようにプログラムされている、方法及び装置に関する。 (もっと読む)
車両の制動制御装置
【課題】エンジンの自動停止中は車両を確実に停止させながら、エンジンの自動再始動後は車両の発進性および加速性を向上させることが出来るようにする。
【解決手段】エンジン11を自動停止および自動再始動させるアイドル制御手段42と、車両10の駆動輪13のトルクTRQwhlを演算する駆動輪トルク演算手段51と、エンジン11が自動停止中にブレーキ装置27,28を作動させ車輪13に制動トルクTRQbrkを加える自動ブレーキ手段52と、車輪13の制動トルクTRQbrkの大きさを設定する制動トルク設定手段53と、エンジン11が自動再始動すると、車輪13に加えられた制動トルクTRQbrkを所定の緩和速度Vbrkで緩和させる制動トルク緩和手段55と、駆動輪トルクTRQwhlに応じて緩和速度Vbrkを変更する緩和速度変更手段56とを有するように構成する。
(もっと読む)
1 - 20 / 40
[ Back to top ]