
Fターム[3D246GB30]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795) | 余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB30]に分類される特許
201 - 220 / 297
衝突防止支援装置
【課題】最適なタイミングで自動ブレーキを開始する衝突防止支援装置を提供することを目的とする。
【解決手段】車両の周囲に存在する障害物と車両との衝突を予測する衝突予測手段と、運転者が把持するステアリングホイールのリム部の把持状態を検出する把持状態検出手段と、障害物と車両とが衝突すると予測された場合、運転者の操作に依らない自動的な制動動作を開始する自動ブレーキタイミングを把持状態検出手段により検出された把持状態に応じて決定する自動ブレーキタイミング決定手段と、自動ブレーキタイミング決定手段により決定された自動ブレーキタイミングで制動動作を実行する制動手段とを備える衝突防止支援装置。
(もっと読む)
車間距離制御装置

【課題】交通事故を未然に防ぐことができる車間距離制御装置を提供すること。
【解決手段】車間距離制御装置は、自車の位置を示す自車位置情報を衛星通信により取得する。自車の周囲に他車が存在する場合、他車に搭載された車間距離制御装置に対して無線通信を行い、他車の位置を示す他車位置情報を全て取得する。地図を表す地図データベースを参照して、全ての他車位置情報の中から、自車の前後に存在する特定他車の位置を示す特定他車位置情報を特定する。自車位置情報が示す位置と特定他車位置情報が示す位置とに基づいて、自車と特定他車との距離を表す車間距離を算出する。自車の速度を計測し、速度と適切な車間距離とを対応付ける距離データベースを参照して、自車の速度に対応する適切な車間距離として検索適切車間距離を検索する。車間距離が検索適切車間距離よりも短い場合、その旨を表す注意情報を自車の運転手に通知する。
(もっと読む)
車両用運転支援装置及び車両用運転支援方法
【課題】運転者の意思を尊重しつつ、適切に自車両前方の障害物の回避効果を向上させる。
【解決手段】前方の障害物SBを回避する必要がある状態で運転者による制動操作を検出すると、障害物回避のためのヨーモーメントを発生させる。ヨーモーメントの発生は、例えば各輪の制駆動力の配分を調整することで実施する。
(もっと読む)
車両用制動制御装置及び方法
【課題】アシスト制動力の自然な調整を可能とした車両用制動制御装置を提供する。
【解決手段】制動力を付与するホィールシリンダとブレーキ操作力に応じた液圧を生成するマスタシリンダを接続する液圧ラインに接続されて各ホィールシリンダへ付与される液圧を調整する液圧調整部と、液圧調整部の作動を制御する制御部とを備える車両用制動制御装置において、ブレーキ操作速度と車速に応じて、または、ブレーキ操作速度と自車両と先行車または車両前方の障害物との距離に応じて、液圧を調整する。つまり、車速vや先行車、障害物との距離といった車両状態量と運転者のブレーキ操作量(例えば踏力f)の変化速度に応じて、踏力fに対して減速度Gを設定する際に用いるゲインCを可変とすることで、減速度特性を調整する。
(もっと読む)
車両用運転操作支援装置
【課題】走行環境の不確定性を考慮した運転操作支援を行い、種々の走行場面において適切な支援を行うことができる車両用運転操作支援装置の提供。
【解決手段】本発明による車両用運転操作支援装置では、車両状態検出手段100および障害物検出手段101の各検出結果に応じた経路演算条件に基づいて、自車両が障害物を回避するための回避運転情報を走行経路算出手段102bで算出し、算出された回避運転情報に応じた走行が可能な経路演算条件の限界値を限界条件取得手段102aで取得するとともに、推定値取得手段により経路演算条件の推定値を取得する。そして、取得された推定値と限界値との比較結果に基づいて、支援制御手段105は、運転操作支援手段104による運転操作の支援を制御する。
(もっと読む)
ブレーキ制御装置、これを備えたブレーキシステム及び車両
【課題】ブレーキシステムの性能を向上させる。
【解決手段】各ブレーキのブレーキキャリパ21a〜dを動作させる第一及び第二アクチュエータ装置200,300と、これらアクチュエータ装置200,300を制御するブレーキ制御装置100とを備えている。ブレーキ制御装置100は、ブレーキに求められる目標性能を設定する目標性能設定部112と、ブレーキによる目標ブレーキ力を求める目標ブレーキ力算出部113と、ブレーキにより目標ブレーキ力を得られ、且つ目標性能を実現できる各アクチュエータ装置の駆動率を求める駆動率算出部114と、各駆動率に応じた駆動信号を各アクチュエータ装置200,300に出力する通信制御部115と、を備えている。
(もっと読む)
車両用衝突安全制御装置
【課題】衝突安全制御をより適切に行なうことが可能な車両用衝突安全制御装置を提供すること。
【解決手段】車両前方の障害物を検出するための障害物検出手段(10)と、該障害物検出手段の出力に基づき車両前方の障害物との衝突可能性を判定する衝突可能性判定手段(40)と、を備え、該衝突可能性判定手段の判定結果に基づき種々の衝突安全制御を行なう車両用衝突安全制御装置(1)であって、前記衝突可能性判定手段は、前記障害物検出手段の出力に対して複数の基準を適用して前記衝突可能性を判定する手段であり、前記複数の基準を用いた判定履歴に基づいて前記衝突可能性を修正することを特徴とする。
(もっと読む)
車両用衝突安全制御装置
【課題】衝突安全制御をより適切に行なうことが可能な車両用衝突安全制御装置を提供すること。
【解決手段】車両前方の障害物を検出するための障害物検出手段(10)と、該障害物検出手段の出力に基づき車両前方の障害物との衝突を予測する衝突予測手段(40)と、を備え、該衝突予測手段の予測結果に基づき種々の衝突安全制御を行なう車両用衝突安全制御装置(1)であって、車両のヨー運動を検出するためのヨー運動検出手段(20)を備え、前記衝突予測手段は、第1の予測モード、及び該第1の予測モードに比して車両前方の障害物との衝突可能性を高く予測し易い第2の予測モードで車両前方の障害物との衝突を予測する手段であり、前記第1の予測モードで車両前方の障害物との衝突可能性があると判断している状態において、前記ヨー運動検出手段により所定程度以上のヨー運動が検出されたときに、前記第2の予測モードに移行することを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】自車両が自車両前方の該障害物を追い越す際、該障害物との過度の接近や接触を確実に抑制し、走行時における安全性を向上させることができる技術を提供する。
【解決手段】障害物検知部1aと、危険領域設定部1dと、侵入検知部1fと、警報制御部1hとを備えている車両の走行制御装置である。障害物検知部1aは自車両前方の障害物を検知する。危険領域設定部1dは、障害物検知部1aにより検知された障害物の自車両側の側方の領域であって所定の幅を有する接触危険領域を設定する。侵入検知部1fは自車両が接触危険領域内に侵入したことを検知する。警報制御部1hは、侵入検知部1fにより接触危険領域内への自車両の侵入が検知されたときに警報装置21を作動させる。
(もっと読む)
車両走行制御装置
【課題】 ドライバの乗り心地感の低下を招くことなく、先行車両に対する追従走行制御を行うことができる車両走行制御装置を提供する。
【解決手段】 車間制御ECU1は、先行車両との車間時間が目標車間時間よりも短い場合に、制御ブレーキをかける制御を行う。車間制御ECU1では、制御ブレーキがかけられる制御ブレーキ頻度を算出している。この制御ブレーキ頻度が所定のしきい値を超えた場合には、目標車間時間を長く調整する。
(もっと読む)
二輪車走行支援装置
【課題】二輪車の安定性を確保しつつ、道路に設置した路側送信機から送信された当該道路における走行支援に関する情報を受信して二輪車の走行支援を行うことが可能な二輪車走行支援装置を提供する。
【解決手段】道路に設置したビーコンから送信されたISA及び停止制御に関する情報を受信して走行支援を行う二輪車走行支援装置において、ISA制御部43は、判定した二輪車の安定性に応じて、二輪車の走行支援の態様を変更するため、二輪車の安定性を確保しつつ、道路に設置したビーコンから送信された当該道路におけるISAに関する情報を受信して二輪車の走行支援を行うことが可能となる。
(もっと読む)
車両の衝突被害軽減装置
【課題】運転者の混乱を招き車両の挙動が不安定になる事態を避けることが出来るようにする。
【解決手段】 車両と衝突する可能性のある障害物が継続的に検出されている期間を検出継続期間ΣTDとして算出する検出期間算出手段16と、検出継続期間ΣTDに応じて障害物を監視対象とするとともに装備品12,13の作動対象にするか否かを決定する監視対象認定手段17と、検出継続期間ΣTDが所定の検出期間閾値TDth1,TDth2,TDth3よりも大きくなると障害物に対する衝突可能性が有ると判定し信頼度指数Rを設定する信頼度指数設定手段18と、運転者の注意力が低下するに連れて小さくなる注意力指数ALを設定する注意力指数設定手段32と、注意力指数ALが小さくなるに連れて検出期間閾値TDth1,TDth2,TDth3を減少補正する検出期間閾値補正手段33とを備えて構成する。
(もっと読む)
衝突被害軽減制動制御装置
【課題】状況に応じてより遠くからブレーキを作動させることができるような衝突被害軽減制動制御装置を提案する。
【解決手段】本発明の衝突被害軽減制動制御装置は、レーダにより得られる車両前方の障害物との車間距離及び相対速度が、制動回避限界を越えるか否か判断する制動回避限界判断手段(S6)と、ナビゲーションシステムにより得られる自車位置及び地図情報に基づいて、走行中の道路の車線数を判別する車線数判別手段(S5)と、該車線数判別手段が片側2車線以上無いと判別し且つ前記制動回避限界判断手段が制動回避限界を超えると判断したときに、制動を実行する制動制御手段(S7〜S4)と、を含んだ構成であることを特徴とする。
(もっと読む)
走行支援システムの制御方法および走行支援システム
本発明は、車両(2)の周囲状況(100)を検出する複数のセンサと搭載装置群への介入制御を行う装置とを備えた、走行支援システムの制御方法および走行支援システムに関する。本発明によれば、走行支援システムは、少なくとも、車両の走行する車線(1)の特性とこの車線に対する車両位置とを検出し、ドライバーの要求に応じたトラジェクトリ(T1〜T4)を設定し、設定されたトラジェクトリに沿って車両をガイドする。  (もっと読む)
(もっと読む)
衝突被害軽減装置
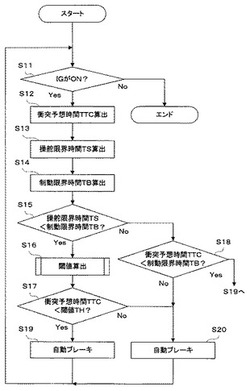
【課題】車両運転者の運転特性に応じてブレーキの作動タイミングを切り替え、安全性を向上させる。
【解決手段】車間距離レーダなどにより測定された車間距離L並びに相対速度Vrに基づいて、先行車両に衝突するまでの衝突時間tcを演算する(S1及びS2)。衝突時間tcは、所定の閾値tnと比較され、該閾値tn以下となったときにブレーキが作動する(S8)。そして、衝突時間tcが所定時間β連続して所定値α以上となったときに、所定規則に則って閾値tnを初期値tdから増加させる一方(S3〜S6)、衝突時間tcが所定値α未満となったときに、閾値を初期値に戻す(S7)。
(もっと読む)
車両の衝突被害軽減装置
【課題】運転者の混乱を招き車両の挙動が不安定になる事態を避けることが出来るようにする。
【解決手段】 車両と衝突する可能性のある障害物が継続的に検出されている期間を検出継続期間ΣTDとして算出する検出期間算出手段16と、検出継続期間ΣTDに応じて障害物を監視対象とするとともに装備品12,13の作動対象にするか否かを決定する監視対象認定手段17と、検出継続期間ΣTDが所定の検出期間閾値TDth1,TDth2,TDth3よりも大きくなると障害物に対する衝突可能性が有ると判定し信頼度指数Rを設定する信頼度指数設定手段18と、運転者の注意力が低下するに連れて小さくなる注意力指数ALを設定する注意力指数設定手段32と、注意力指数ALが小さくなるに連れて検出期間閾値TDth1,TDth2,TDth3を増大補正する検出期間閾値補正手段33とを備えて構成する。
(もっと読む)
車両用安全支援装置
【課題】不要な警報を抑制して適切な安全支援を行なうこと。
【解決手段】障害物を検知する障害物検知手段(10)と、該障害物検知手段により検知された障害物の接近程度に応じて警報出力制御を行なう制御手段(60)と、を備える車両用安全支援装置であって、自車両の現在位置を特定する現在位置特定手段(70)を備え、前記制御手段は、前記障害物検知手段の検知結果及び前記現在位置特定手段により特定された自車両の現在位置の履歴に基づいて、同一位置で所定回数以上、前記障害物検知手段により所定時間未満の間、障害物が検知されたと判断した場合に、当該位置を警報抑制位置として所定の記憶手段(62)に記憶させ、自車両が前記所定の記憶手段に記憶された警報抑制位置を通過する際に、前記警報出力制御を抑制することを特徴とする、車両用安全支援装置。
(もっと読む)
車両制御装置、車両制御方法及びコンピュータプログラム
【課題】制動制御の開始タイミングを早くすることによって障害物との接触の際の衝撃を小さくすることを可能とした車両制御装置、車両制御方法及びコンピュータプログラムを提供する。
【解決手段】自車両と前方車両とが衝突する虞があると判定された状況下で衝突防止制御を行う際に、自車情報、前方車両情報及び周辺道路状況を考慮することにより、ステアリング操作によって前方車両との衝突が回避できるか否かを判定し(S21〜S25)、回避できると判定された場合にはAT5をシフトホールド制御するとともに、回避できないと判定された場合にはAT5をシフトダウン制御するように構成する。
(もっと読む)
車両制御装置、車両制御方法及びコンピュータプログラム
【課題】車両の回避運動中に横滑り等が発生することを防止し、車両の挙動を安定させた状態で障害物との衝突を確実に防止することを可能とした車両制御装置、車両制御方法及びコンピュータプログラムを提供する。
【解決手段】自車両と前方車両とが衝突する虞があると判定された状況下で衝突防止制御を行う際に、自車情報、前方車両情報及び周辺道路状況を考慮することにより、ステアリング操作によって前方車両との衝突が回避できるか否かを判定し、回避できると判定された場合にはAT5をシフトホールド制御するとともに、回避できないと判定された場合にはAT5をシフトダウン制御するように構成する。
(もっと読む)
車両の走行支援装置
【課題】前走車の追い越しなどのために自車が一時的に対向車線にはみ出す走行を行なう場合に、必要以上に早期に警報発生や自車の制動などの接触対策処理が実行されるのを防止することができる車両の走行支援装置を提供する。
【解決手段】自車1の走行形態が一時的に対向車線にはみ出した走行形態であるか否かを判断する走行形態判断手段7を備える。接触可能性判断手段9は、走行形態判断手段7の判断結果が肯定的である場合に、否定的である場合よりも、自車1の進行方向前方の領域で物体検出手段2により検出される物体と自車1との接触可能性が有るか否かの判断結果が肯定的な判断結果となるのを抑制する。
(もっと読む)
201 - 220 / 297
[ Back to top ]