
Fターム[3D246GB30]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795) | 余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB30]に分類される特許
161 - 180 / 297
車両制御装置、車両制御方法および車両制御処理プログラム
【課題】自車両の進路または進路近傍に存在する障害物を確実かつ安全に通過させるように自車両を制御することを課題とする。
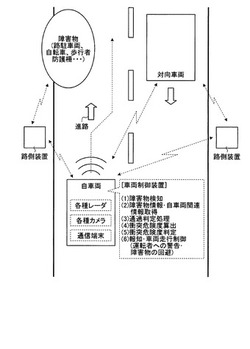
【解決手段】車両制御装置は、例えば、各種レーダからの入力に基づいて、自車両の進路または進路近傍に障害物を検知すると、検知された障害物に関する障害物情報、および自車両に関する自車両関連情報を各種レーダ等から取得する。障害物情報および自車両関連情報の取得後、車両制御装置は、検知された障害物を安全に通過できるか否かを判定する通過判定を実行する。具体的には、各種レーダ等から取得した障害物情報および自車両関連情報を用いて、自車両の運転者や同乗者が、安全と感じる程度以上の距離を障害物と自車両との間で保てるか否かを基準とした判定を行う。
(もっと読む)
車両用走行支援装置および車両用走行支援方法

【課題】障害物との接触を回避する操舵制御を行う場合に、運転者に違和感が生じる事態を低減すること。
【解決手段】操舵回避能力が設定された閾値より低い場合に、障害物との接触回避のための操舵制御を抑制する(図10の区間B)。このため、操舵回避能力が設定閾値より低くなり、操舵制御による障害物との接触回避効果が低下した場合に、その操舵制御を抑制できる。この結果、操舵制御が行われている場合であっても、運転者が操舵操作を行った際、違和感を生じる事態を低減することができる。
(もっと読む)
車両制御装置、車両制御方法および車両制御処理プログラム
【課題】商用車両の動きをいち早く運転者に通知することを課題とする。
【解決手段】車両制御装置は、例えば、商用車両としてバスを検知した場合には、自車両に搭載されるナビゲーション装置から地図データおよび走行予定ルートデータを取得して、自車両の近傍にバスの停留所が存在するかを検索する。そして、自車両の近傍にバスの停留所を検索した場合には、車車間通信などによりバスから路線運行図を取得して、自車両周辺に検知されたバスが自車両の近傍に検索された停留所に停車するか否かを判定する。判定の結果、自車両周辺に検知されたバスが自車両の近傍に検索された停留所に停車する場合には、検知されたバスが自車両の近傍で停車する可能性がある旨のメッセージをドライバに報知する。
(もっと読む)
走行制御装置
【課題】状況に応じた適切な制御によって障害物との衝突の発生及び二次衝突の発生を回避できる走行制御装置を提供する。
【解決手段】走行制御装置1では、自車両が障害物と衝突する可能性があると判断したときに減速制御を実行し、自車両と障害物との衝突の発生を回避する。また、走行制御装置1では、周辺環境情報に基づいて定められる作動条件として、減速制御の実行開始から所定時間が経過するまでに実際に衝突が発生した場合、或いは自車両が交通弱者との衝突の可能性が他の場所に比べて高い交差点付近に位置している場合には、減速制御を開始してから所定時間が経過した後も減速制御を維持する。したがって、走行制御装置1では、状況に応じた適切な減速制御が実行され、二次衝突の発生を精度良く回避できる。
(もっと読む)
車両の運転支援装置
【課題】自車両のドライバが視認可能な障害物と視認困難な障害物との双方に対して適切なタイミングで運転支援を行う。
【解決手段】障害物を検出した場合、自車両のドライバが視認可能な第1の障害物か視認困難な第2の障害物かを判断し(S2)、各障害物の衝突リスク(ベース値)を修正し、第2の障害物の衝突リスクが第1の障害物の衝突リスクよりも大きくなるように調整する(S3)。そして、第2の障害物の衝突リスクR2を閾値Rcと比較し、R2≧Rcのときに第2の障害物に対する警報を出力する(S5)。また、R2<Rcのときには、第1の障害物の衝突リスクR1を閾値Rccと比較し、R1≧Rccの場合、衝突の危険性があると判断して自動ブレーキや回避操舵を行う(S7)ことで、自車両のドライバが視認可能な障害物と視認困難な障害物との双方に対して適切なタイミングで運転支援を行い、安全を確保する。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】前方の障害物などを操舵回避する際の、無用な制御介入を制限する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定の閾値XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方車両の側とは逆方向に横移動することを検知したら回避フラグをFa=1にセットし(ステップS6)、その後、今度は側方車両の側に横移動を開始したら復帰フラグをFr=1にセットする(ステップS7)。こうして復帰フラッグがFr=1にセットされたら、設定時間Tmが経過するまで抑制フラグをF=0にリセットし、横移動の抑制を禁止する(ステップS9)。
(もっと読む)
車両用安全制御装置
【課題】自動制動制御による自動ブレーキを安全に解除することが可能な車両用安全制御装置を提供する。
【解決手段】車両用安全制御装置では、安全制御処理により自動ブレーキ(自動介入制動)が作動すると制動制御処理が起動され、衝突予測時間Tcがゼロとなる時点の前後一定期間に検出した加速度(衝突加速度)αcを取得し(S210)、少なくとも自動介入制動により車両に生じる加速度を上回るように予め設定された衝突閾値αaを用いて閾値判定を行う(S220)。そして、衝突加速度αcが衝突閾値αa以上である場合(S220;YES)、自動介入制動を保持させ(S230)、衝突加速度αcが衝突閾値αa未満である場合(S220;NO)、自動介入制動を解除させる(S250)。なお、自動介入制動の解除タイミングは、衝突加速度αc等に応じて設定(S240)した加速度勾配に従う。
(もっと読む)
車両制御装置
【課題】走行シーンに合わせた適切な車両制御を行う。
【解決手段】車両1が走行している道路の走行優先度よりも高い走行優先度を有する道路を走行している接近車両(優先接近車両)が存在する場合、制御部4が、車両1が停止した場合に優先接近車両が通過可能であるか否かを判定する。そして優先接近車両が通過可能であるとと判定した場合、制御部4は、報知・制動制御が効果的であると判断して報知・制動制御を実行し、逆に優先接近車両が通過不可能であると判定した場合には、報知・制動制御が効果的でないと判断して報知・制動制御を実行しない。これにより、報知・制動を有効的に実行させることが可能となり、結果として、報知・制動制御に対して運転者が煩わしさや違和感を感じることを抑制できる。
(もっと読む)
車両制御装置
【課題】検知された障害物の特性に合わせた適切な車両制御を行う。
【解決手段】制御部4が、障害物が移動物であるのか停止物であるのか、及び車両や壁であるのか人や軽車両であるのかに基づいて目標停止距離を変更する。すなわち制御部4は、障害物が人や軽車両である(車両や壁でない)場合には車両や壁である場合と比較して、目標停止距離Dを大きくすることにより制動力を発生させる時点での障害物からの距離を大きく(即ち制動力の発生タイミングを早く)する。これにより、検知された障害物の特性に合わせた適切な車両制御を行うことができる。
(もっと読む)
側方障害物回避装置及び側方障害物回避方法
【課題】側方障害物回避の制御による車両挙動の変動を抑制して、運転者への違和感を低減する。
【解決手段】所定時間後の自車両の将来位置に基づき、自車両側方に位置する障害物に対するリスクが高い場合には障害物への接近を防止する方向に自車両を制御する。このとき、運転者による修正操舵が増加する状況と推定する場合には、制御の開始を遅らせたり制御量を小さくしたりして、上記制御を抑制する。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】自車両の車線変更などの横移動を抑制するタイミングを最適化する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定横位置XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方物体の側に横移動するときの走行車線に対する横速度Vxを検出し(ステップS6)、この横速度Vxが速いほど、後刻横位置Xfが所定横位置XLに達しやすくなるように、後刻横位置Xfを補正する。すなわち、横速度Vxが速いほど、1よりも大きい値になる補正ゲインαを算出し(ステップS7)、推定した後刻横位置Xfに補正ゲインαを乗じることで、この後刻横位置Xfを補正する(ステップS11)。
(もっと読む)
車両の制動灯制御装置
【課題】後続車両に対して制動灯による警告を適切に行うことができる車両の制御灯制御装置の提供。
【解決手段】自車両前方の物標を検知する物標検知手段1と、物標検知手段1が物標を検知した場合において、所定の条件下で、自車両の制動手段5を作動させる走行制御手段2と、走行制御手段2による制動手段5の作動に伴って、制動灯6を点灯させる点灯制御手段3と、自車両の車速を検知する車速検知手段4とを備え、点灯制御手段3は、制動手段5の作動開始時の自車両の車速が速いほど、制動手段5の作動開始から制動灯6の点灯開始までの点灯開始時間差を短くする。
(もっと読む)
車両の運転支援装置
【課題】交差点における対向車両の発進を適切に判断し、不要な警報や制御介入を防止する。
【解決手段】交差点で対向車両がいない場合、自車両が交差点を直進或いは左折する場合、対向車両の位置が右折専用レーン或いは左折専用レーンである場合、対向車両のウィンカ或いはハザードランプが点滅している場合、駐車灯が点灯している場合、自車両側の信号機が右折可である場合、対向車両側の信号機が赤である場合、対向車両側の交差点の先の道路が渋滞している場合には、対向車両の発進予測処理を中止し(S16)、それ以外は、対向車両の発進予測処理を実行する(S15)。そして、障害物の衝突リスクを演算して衝突の可能性があるか否かを調べ(S18)、衝突の可能性がある場合、警報出力や自動ブレーキ・操舵等の運転支援制御を実行し(S19)、安全を確保する。
(もっと読む)
ブレーキシステム
【課題】信号機が赤信号から青信号に切り換わり直前の車両が発進した場合には、この状況を確実に運転者に認識させるブレーキシステムを構成する。
【解決手段】信号機の信号灯が「青」に切り換わったことをフロントカメラ12で撮影された画像情報から判別し、停車状態にあることを停車判別手段22で判別し、直前の車両との車間距離が拡大したことを距離センサ13からの信号で判別した場合には、ブレーキ制御ユニット40の弁とポンプとを制御することによって、ブレーキ制御ユニット40のブレーキ液をマスターシリンダ32に戻し、ブレーキペダル8の操作反力を高める操作反力設定手段25を備えた。
(もっと読む)
車両の走行安全装置
【課題】物体を検出すると共に、物体の自車に対する位置関係に応じて接触の可能性を的確に判定するようにした車両の走行安全装置を提供する。
【解決手段】自車の周辺に送信した電磁波の反射に基づいて物体を検出すると共に、物体との相対距離と相対速度からなる相対関係と、物体を回避するのに必要なステアリング回避量を算出し、それら算出値からブレーキ作動距離と警報作動距離を算出し、相対距離が作動距離未満のときに接触の可能性があると判定して接触回避支援手段を作動させる(S10からS34)車両の走行安全装置において、物体100の反射点の配列に応じて回避所要時間を減少補正し、接触の可能性があると判定し難くさせる(S16)。
(もっと読む)
車両の誤発進防止装置
【課題】車両の発進時および車両の発進直後の少なく一方において、運転者が車両を動かそうとする意志の方向と異なる方向に車両が動こうとしたときに、車両の動きを抑制する。
【解決手段】制御部2は、レンジ検出部3からの運転者が選択した選択レンジの検出信号および運転者状態検出部5からの運転者状態検出信号に基づいて、運転者の選択したレンジの車両の移動方向が運転者の車両を移動させようとする意志の方向と異なると判断したときは、車両抑制手段11を作動させて車両の動きを抑制する。
(もっと読む)
車両制御装置
【課題】車両制御装置において、目標加速度に対する実加速度の応答遅れを低減すること。
【解決手段】ブレーキフィードバック制御部は、ブレーキフィードバック利用状態であれば、PID制御モデルを用いてブレーキフィードバックトルクTfb_BKを演算し(S330,S340)、ブレーキフィードバック制限状態であれば、PID制御モデルを用いたブレーキフィードバックトルクTfb_PTの演算を停止し、ブレーキ制限開始タイミング時に出力していたブレーキフィードバックトルクTfb_BKを出力値として保持する(S360)。そして、ブレーキ制限解除タイミングとなると、保持していたブレーキフィードバックトルクTfb_BKを初期値として、フィードバック制御を再開する。これにより、ブレーキ制御解除タイミング直後のブレーキ機構では、0[N・m]よりも大きい特定制動トルクを発生する。
(もっと読む)
車両制御装置
【課題】運転者のブレーキ操作に関わらずブレーキを作動させる第1種ブレーキアシストを実行し、筋電位に基づく実効的な運転アシスト動作を行う車両制御装置を提供する。
【解決手段】運転者の筋電位を検出する筋電位検出手段と、制動距離算出手段と、車間距離を計測する車間距離計測手段と、相対速度を算出する相対速度算出手段と、筋電位判定手段と、前記車間距離計測手段によって計測された車間距離が前記制動距離算出手段によって算出された制動距離以下であり、かつ前記相対速度算出手段によって算出された相対速度が0以下であるか否かを判定する第1判定手段S108と、前記筋電位判定手段で真と判定され、かつ前記第1判定手段S108で真と判定されとき、運転者のブレーキ操作に関わらずブレーキを作動させる第1種ブレーキアシストを実行するブレーキアシスト手段S109と、を有することを特徴とする。
(もっと読む)
車両制御装置及び車両制御システム
【課題】衝突する各車両において被害低減効果を向上できる車両制御装置及び車両制御システムを提供する。
【解決手段】車両制御装置1では、自車両10と他車両との衝突パターンを推定すると共に、他車両で作動可能な衝突対応デバイス3に関する「デバイス制御要求フラグ」を受信する。続いて、衝突パターン及び「デバイス制御要求フラグ」に応じて、自車両10及び他車両で作動させる衝突対応デバイス3のそれぞれを決定する。そして、自車両10において、決定した衝突対応デバイス3を作動させるよう制御すると共に、他車両に対して、決定した衝突対応デバイスを作動させるよう要求する。すなわち、自車両10で作動させる衝突対応デバイス3と他車両で作動させる衝突対応デバイスとの双方が、自車両10と他車両との衝突形態に応じて決定されることとなる。よって、各車両にとって最適な衝突被害低減を実現できる。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置の誤動作を防止しつつ衝突被害軽減効果の実効を図る。
【解決手段】車両進行方向に位置する障害物までの距離L及び障害物との相対速度Vに基づいて障害物に衝突するまでの衝突時間tを演算し(S1及びS2)、衝突時間tがブレーキ作動タイミングを規定する閾値以下となったときに(S8)、ブレーキを作動させると共に燃料供給を中止する(S9)。このとき、車両運転者に加速意思があり(S3)、車両運転者により変速機がシフトダウンされてから所定時間内であり(S4)、かつ、ウインカ作動中であれば(S5)、閾値を所定値だけ小さくする(S6及びS7)。このため、加速を伴う車線変更操作が行われているとき、障害物との距離が一時的に短くなってもブレーキが急に作動することがなく、車両姿勢が変化して不安定となることや、追従する後方車両が衝突してしまうことを抑制できる。
(もっと読む)
161 - 180 / 297
[ Back to top ]