
Fターム[3D246GB30]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795) | 余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB30]に分類される特許
101 - 120 / 297
車両接触回避支援装置
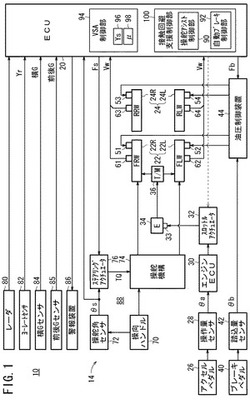
【課題】障害物との接触回避の支援制御において、路面摩擦係数を好適に推定することが可能な車両接触回避支援装置を提供する。
【解決手段】車両接触回避支援装置14の車両接触回避支援制御手段20は、左右の後輪24L、24R又は左右の前輪22R、22Lに対する制動力に基づく第1路面摩擦係数μ1と、左右の前輪22R、22L及び左右の後輪24L、24Rに対する制動力に基づく第2路面摩擦係数μ2とが異なる場合、第2路面摩擦係数μ2に基づき接触回避の支援制御を行う。
(もっと読む)
車両運転支援装置及び車両運転支援方法

【課題】運転者に違和感のない制御感を与えつつ、支援制御を適切に行うことができる車両運転支援装置及び車両運転支援方法を提供する。
【解決手段】設定時間後の自車両の将来位置を予測する。予測した自車両の将来位置が、予め設定した車線幅方向横位置である制御開始位置よりも自車走行車線の中央からみ外側にあるほど、自車走行車線の中央に向かうヨーモーメントを大きく自車両に付与して自車両を制御する。その際、自車両に付与する前記ヨーモーメントが小さいほど、自車両に大きな減速加速度を付与する。
(もっと読む)
車両運転システム
【課題】通常走行時の車両速度を学習し、エンジンが燃料を無駄に消費することを抑えられる車両運転システムを提供する。
【解決手段】車両の位置を検出する車両位置検出手段(GPSセンサ3)と、車両速度を検出する車両速度検出手段(車速センサ4)と、既に走行したことがある経路における車両の速度情報が記憶される記憶手段(記憶媒体8)と、現在の車両の位置における車両速度が記憶されている過去の車両速度の統計値(平均値X)に対して基準値以上に高い車両速度超過領域を判定する判定手段と、車両速度超過領域に入ったことを運転者に知らせる注意喚起手段及び車両速度超過領域にて車両速度を抑える車両速度制御手段の少なくとも一方と、を備える構成とした。
(もっと読む)
車両の走行安全装置
【課題】交差点を適切に検出して交差点での自車両の所望の走行安全性を確保する。
【解決手段】車両の走行安全装置10は、自車両の前方部に設けられて自車両の左右方向の外界を撮像して得た画像を出力する第1カメラ21および第2カメラ22と、各カメラ21,22から出力された画像データに基づいて、路面上端の線分を平面境界線として抽出する境界線抽出部34と、路面および路面上の構造物が存在しない空の領域を抽出し、空の領域から最も平面境界線に近接する近接点を抽出する近接点抽出部35と、平面境界線と近接点との距離を算出する距離算出部36と、平面境界線と近接点との距離が所定距離以下である場合に、自車両が交差点に直面する地点に位置していると判定する交差点判定部37とを備える。
(もっと読む)
車両制御装置、車両および車両制御方法
【課題】車両制御における運転者の違和感を抑制することができる車両制御装置、車両および車両制御方法を提案すること。
【解決手段】実相対距離Drに基づいて運転者の知覚による知覚対象物TAと自車両CAとの相対速度を示す知覚相対距離Dsを算出し、実相対速度Vrに基づいて運転者の知覚による知覚対象物TAと自車両CAとの相対速度を示す知覚相対速度Vsを算出し(ステップST2)、知覚相対距離Dsと知覚相対速度Vsとの比である知覚相対比Xを算出し(ステップST3)、知覚相対比Xがしきい値X0を越える場合に車両制御を行う(ステップST4,5)。知覚相対比X(知覚相対比Xが反映された制御値)に基づいて車両制御を行うので、車両制御における運転者の違和感を抑制することができる。
(もっと読む)
障害物認識装置
【課題】本発明は、車体が傾いた場合でも適切に障害物を認識することができる障害物認識装置を提供することを課題とする。
【解決手段】移動体に搭載される障害物認識装置1であって、移動体の周辺の物体を検出する物体検出手段10,31と、移動体の車体の傾斜に応じて物体検出手段10,31で検出可能な走行面の領域を算出する面領域算出手段32とを備え、物体検出手段10,31で検出した物体のうち面領域算出手段32で算出した走行面の領域に存在する物体を障害物として認識しないことを特徴とする。
(もっと読む)
衝突安全装置
【課題】本発明は、障害物が存在するエリアを走行する場合でも円滑な走行を可能とする衝突安全装置を提供することを課題とする。
【解決手段】障害物と衝突の可能性のある部位Bに衝突吸収構造を有する移動体に搭載される衝突安全装置1であって、移動体の周辺の障害物を検出する障害物検出手段10,31と、障害物検出手段10,31で障害物を検出した場合に減速制御を行う制御手段33とを備え、制御手段33は、減速制御を行うときの速度の制御値を少なくとも移動体の障害物との衝突部位Bの衝撃吸収性能に応じて設定することを特徴とする。
(もっと読む)
車両用衝突可能性判定装置
【課題】 交差点における自車および交差車両の衝突可能性の判定を的確に行えるようにする。
【解決手段】 自車の進行方向に基づいて自車の進路を予測し、自車の進行方向と交差する方向に移動する交差車両を検知し、交差車両の進行方向の変化に基づいて交差車両の進路を予測し、自車の進路および交差車両の進路に基づいて自車および交差車両の衝突可能性を判定する。その際に、自車の停止状態からの発進に応じて交差車両が自車から離れる方向に進路変化した場合に、その後の交差車両の進路が前記進路変化前の進路に戻るように変化すると予測し、前記予測された進路に基づいて自車および交差車両の衝突可能性を判定するので、一旦回避操作を行った交差車両が元の進路に戻ろうとして戻し操作を行うことを見越して衝突可能性を判定することが可能となり、衝突可能性の判定精度が向上する。
(もっと読む)
走行支援装置
【課題】ドライバーが装置自体の走行制御に過度に依存することを避け、自発的な操作を促すことが可能な走行支援装置を提供する。
【解決手段】自車両の周辺に存在する障害物を検出する前方監視レーザレーダ13と、前方監視レーザレーダ13が自車両の周辺に存在する障害物を検出したときに、自車両の車速Vを最高速度制限値Vmaxr以下にする速度制御を行うECU30とを備えた速度制御装置1aにおいて、ECU30は、前方監視レーザレーダ13が自車両の周辺に存在する障害物を検出した後に障害物を検出しなくなったときでも、自車両のドライバーが自車両を最高速度制限値Vmaxr以下する減速操作を自発的に行なうまでは速度制御を行ない、減速操作を自発的に行なったときに速度制御を解除する。これによりドライバーが装置自体の走行制御に過度に依存することを避け、自発的な操作を促す。
(もっと読む)
ブレーキ制御装置
【課題】信号機と信号機の停止線との距離に対応して、より適切に補助的な制動力を自車両に付与することが可能なブレーキ制御装置を提供する。
【解決手段】信号機401と信号機401の停止線402との距離Dを取得する通信装置104と、自車両のドライバーのブレーキ操作による制動力に対して、補助的な制動力を付与するブレーキアクチュエータ131とを備えた運転支援装置100において、自車両が信号機401に接近するときに、ブレーキアクチュエータ131は、通信装置104が取得した信号機401と信号機401の停止線402との距離Dに基づいて、付与する補助的な制動力を変更するため、信号機401と信号機401の停止線402との距離Dに対応して、より適切な大きさの制動力を自車両に付与することが可能となる。
(もっと読む)
衝突安全システム
【課題】ドライバーの状態に応じて適切な車両操作の支援および車両制御の実行を可能とする衝突安全システムを提供する。
【解決手段】車両周囲の障害物を検出する障害物検出手段と、車両と障害物とが衝突する危険性が高いか否かを判定する衝突危険度判定手段と、衝突危険度判定手段によって衝突の危険性が高いと判定された場合に、車両の車室内において警報音を鳴動して衝突の危険性を車両のドライバーに報知する警報手段と、車両のドライバーが混乱しているか否かを判定する混乱判定手段とを備える、衝突安全システムであって、警報手段は、混乱判定手段によってドライバーが混乱していると判定された場合、警報音の音量をドライバーが混乱していないと判定された場合に比べて小さくする音量制御手段を含む、衝突安全システムである。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に望ましくない車両の走行状態を回避することで走行安全性の向上を図る。
【解決手段】車両の走行状態に基づいてドライバにとって望ましくない領域、即ち、ジレンマゾーンへの車両の進入を予測する車両進入予測手段(車両走行状態検出手段)と、ドライバにとって望ましくない領域への車両の進入を回避するように出力を調整する出力調整手段とを設ける。
(もっと読む)
車両制御装置および車両制御方法
【課題】車両制御における運転者の違和感を抑制することができる車両制御装置および車両制御方法を提案すること。
【解決手段】実相対距離Drに基づいて運転者の知覚による知覚対象物TAと自車両CAとの相対速度を示す知覚相対距離Dsを算出し、実相対速度Vrに基づいて運転者の知覚による知覚対象物TAと自車両CAとの相対速度を示す知覚相対速度Vsを算出し(ステップST2)、知覚相対距離Dsと知覚相対速度Vsとの比である知覚相対比Xを算出し(ステップST3)、知覚相対比Xがしきい値X0を越える場合に車両制御を行う(ステップST4,5)。知覚相対比Xに基づいて車両制御を行うので、車両制御における運転者の違和感を抑制することができる。
(もっと読む)
車両の走行安全装置
【課題】運転者が安全装置の作動に煩わしさを感じてしまうことを防止しつつ、適切なタイミングで安全装置を作動させる。
【解決手段】車両の走行安全装置10は、所定の接触判定条件に基づき自車両と物体との接触に係る判定を行なう接触判定部24と、接触判定部24の判定結果に応じて接触回避の支援動作を作動させる車両制御部25と、物体検知部21により検知された物体の形状に基づき、自車両の走行路に接続される接続路の状態を判定する接続路判定部22と、自車両の走行路と接続路との接続部付近の見通しの良否を判定する見通し判定部23とを備え、接触判定部24は、接続路の幅が所定閾値以下であって、かつ、接続路の手前位置に検知された路側物により接続部付近の見通しが悪いと判定された場合に、接触回避の支援動作が作動し易くなるようにして接触判定条件を変更する。
(もっと読む)
車両用運転支援装置及び車両用運転支援方法
【課題】運転者の運転操作に応じて適切に運転支援を行うことができる車両用運転支援装置及び車両用運転支援方法を提供する。
【解決手段】運転者の運転操作と自車両の走行環境とを検出し、検出した運転操作が自車両の走行環境に応じた運転目的(前方物体との接触回避など)を達成不可能な運転操作であるとき、当該運転目的を達成するための運転操作支援力を発生するべく、操作支援アクチュエータを駆動制御する。ここでは、操舵および制動の少なくとも一方により運転操作支援を行う。
(もっと読む)
車両の運動制御装置
【課題】
運転者への違和感となる不必要な予圧制御(予備制御)を抑制する。
【解決手段】
車輪の制動トルクを制御する制動手段と、車両の操舵角速度を取得する操舵角速度取得手段と、操舵角速度取得手段の取得する操舵角速度に基づいて基準横加速度を決定する決定手段と、車両の実横加速度を取得する実横加速度取得手段とを備える。決定手段は、操舵角速度が大きいほど基準横加速度を小さい値に決定し、或いは、操舵角速度が小さいほど基準横加速度を大きい値に決定する。実横加速度取得手段が取得する実横加速度が基準横加速度を超えたときに、制動手段を介して車輪への制動トルク付与を開始する。
(もっと読む)
運転支援装置
【課題】路面の摩擦係数(路面μ)が低い場面でも、障害物と車両Cの接触の可能性がある場合に、運転者に違和感を与えることなく、車両Cを適切進路から逸脱し難くなるように制御できる運転支援装置1を提供する。
【解決手段】障害物の回避を支援するステアリング制御又はブレーキ制御の制御量を算出し、この制御量で所定の制御開始時期からステアリング制御又はブレーキ制御を実施することで運転を支援する運転支援装置1において、ステアリングホイール3に振動をさせ、この振動に起因する車両挙動又は操舵角の変化量に応じて、路面μが低いか否かを判定し、路面μが低いと判定された場合に制御量又は制御開始時期を補正する。
(もっと読む)
車両制御装置
【課題】 坂路における車速制御の応答性を高めることができる車両制御装置を提供する。
【解決手段】 各車輪FL,FR,RL,RRに制動力を発生させるホイルシリンダW/Cと、路面の勾配を検出するコンバインセンサ33と、路面勾配に応じた駆動力を演算し、設定された制御目標速度になるように前輪FL,FRに対して駆動力を作用させる速度制御中であって、路面勾配とは別の路面状態(路面μ)に応じて演算された制動力を発生させ、車輪の回転速度を制御する液圧ユニット31と、液圧ユニット31をコントロールするブレーキCU32と、を備えた。
(もっと読む)
車両用制御装置
【課題】運転者の覚醒度が低下している場合に、坂道において停車中の車両が重力によってずり下がることを防止することができる車両用制御装置を提供すること。
【解決手段】ブレーキ操作の解除後に車両の制動力を保持可能な制御を行う車両用制御装置において、運転者の覚醒度を検出する覚醒度検出手段11と、覚醒度検出手段11が運転者の覚醒度の低下を検出した場合、上記制御の開始条件若しくは解除条件又は目標制動力を変更する設定変更手段12とを備える。
(もっと読む)
自動車の周囲環境のモニタリング方法
【課題】 自動ブレーキの不適切な作動を防止しながら、1つの進路にしたがって移動することができる自動車の周囲環境をモニタする方法を提供する。
【解決手段】 本発明の方法は、検出センサ、自動車に関するパラメータ、および自動車の周囲環境内にある障害物に基づいて、複数の運転危険度を計算するステップと、障害物が、自動車の進路上にあるか否かを特定するステップと、計算された運転危険度、および自動車の進路上の障害物の特定に基づいて、自動車のブレーキの作動に関する判定を行うステップとを含んでいる
(もっと読む)
101 - 120 / 297
[ Back to top ]