
Fターム[3D246GB30]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795) | 余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB30]に分類される特許
81 - 100 / 297
車両制御システム
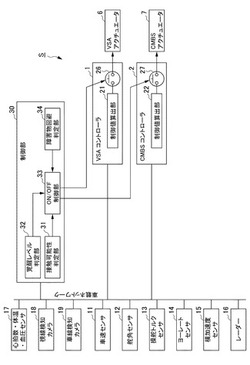
【課題】車両挙動制御装置がOFFの状態にされていた場合であっても、ドライバの覚醒度が低い場合には、ドライバによる障害物回避操作および車両安定化操作を支援できる車両制御システムを提供すること。
【解決手段】車両の挙動を制御する車両挙動制御装置を備えた車両制御システムSにおいて、障害物との接触を回避するとともに前記車両の挙動を安定化させるために前記車両挙動制御装置を制御する車両挙動制御手段と、ドライバの覚醒度を判定する覚醒レベル判定部32と、を備え、前記車両挙動制御手段は、前記車両挙動制御装置がOFFの状態であっても、前記覚醒レベル判定部32により判定された覚醒度が所定の覚醒度より低い場合には、前記車両挙動制御装置をONの状態に切り替えることを特徴とする。
(もっと読む)
衝突被害軽減装置

【課題】自車両に先行する第1障害物の衝突被害の軽減を図る。
【解決手段】レーダの各種測定結果に基づいて、第1障害物と自車両に先々行する第2障害物とを特定できたときに、第1障害物の第1速度Vo1及び第2障害物の第2速度Vo2が第1所定閾値Vt以下、第1、第2障害物間の距離Ddが第2所定閾値Dt以下、且つ、第1障害物のレーダ反射断面積Soが第3所定閾値St以下である所定状態であるか否かを判定する(S14)。そして、所定状態であれば、第1障害物と第2障害物とが接近して連なった低速走行状態又は停止状態であると判定して、衝突距離DLoをより長い距離DL1に変更すると共に、所定減速度αoをより大きい減速度α1に変更する(S17,S18)。このため、ブレーキ作動タイミングを早期化させ、より大きな減速度を発生させられるので、第1障害物の衝突被害の軽減が図られる。
(もっと読む)
車両の自動ブレーキ制御装置
【課題】本発明は、より多くの場面で被害軽減の大きな効果を得ることができる車両の自動ブレーキ制御装置を提供する。
【解決手段】ミリ波レーダからの検出信号より障害物判定部(3a)にて障害物が移動物であるか静止物であるか或いは移動物から静止物となったものか等の障害物の状態を判定(S12,S16)し、判定結果をブレーキ制御部へ供給し、ブレーキ制御部では、自車と障害物の相対速度と障害物の状態とに基づいて、移動物及び移動状態から静止状態となった静止物については移動物用ブレーキ制御を行い(S14)、静止物については静止物用ブレーキ制御を行い(S18)、衝突予測時間算出部にて算出された衝突予測時間が各々の制御により設定された作動タイミングとなった時に警告灯、スピーカ或いは油圧アクチュエータへ作動信号を供給する。
(もっと読む)
走行支援装置
【課題】車両前方の障害物に関する情報を、道路状況に応じて適切なタイミングで提供する。
【解決手段】障害物の発生位置に基づき目標停止位置Xstopを算出し(ステップS21)、道路形状に基づき自車両が目標停止位置Xstopに至るまでの車速パターンを作成し、この車速パターンで走行する際の運転者の操作負荷量Wloadを、加減速負荷量、操舵負荷量等の身体負荷量と、前方注視負荷量、確認負荷量等の認知負荷量とから予測する(ステップS22)。操作負荷量Wloadがしきい値を超える区間を運転負荷増大区間とし、この区間に目標停止位置Xstopに基準減速度Ginfoで停止するための情報提供位置Xinfoが含まれる場合には、運転負荷増大区間の開始点から所定量だけ自車両よりの位置での車速に基づき、自車両が目標停止位置Xstopに停止するための必要減速度Greqがしきい値を超えているかを判定し、しきい値をこえているときに障害情報の提供を行う。
(もっと読む)
車両の自動ブレーキ制御装置
【課題】本発明は、交差点内或いは交差点付近において誤作動を低減することのできる車両の自動ブレーキ制御装置を提供する。
【解決手段】ミリ波レーダで検出された障害物の位置情報及びGPSで検出された自車の位置情報から障害物位置判定部にて障害物の位置が交差点内或いは交差点付近であるか否かを判定し(S16〜S22)、判定結果をブレーキ制御部へ供給し、ブレーキ制御部では、障害物が静止物である場合には静止物用ブレーキ制御、障害物が移動物で且つ自車或いは障害物の位置が交差点内或いは交差点付近である場合には静止物用ブレーキ制御を行い(S26)、障害物が移動物で且つ自車或いは障害物の位置が前述以外の場合には移動物用ブレーキ制御を行い(S28)、警告灯、スピーカ及びブレーキ装置の作動タイミングを制御する。
(もっと読む)
運転支援装置
【課題】自車両の前方を走行する車両の挙動に応じて車間距離を自動的に延長できる機能性を向上させた運転支援装置を提供すること。
【解決手段】自車両が交差点に近づくと、交差点位置判断部11は先行車両の速度と加速度とをレーダ装置1により検出する。さらに先行車両と先先行車両との間の車間距離に応じた補正係数を読み出す。また交差点から自車両までの距離を算出し、先行車両の速度、交差点から自車両までの距離、先行車両の加速度をもとに延長車間距離特性データを参照し、自車両が交差点に接近したときの延長車間距離を読み出し補正係数により補正する。この結果、補正された延長車間距離は先行車両の加速度、先行車両と先先行車両との間の車間距離、交差点からの距離などの先行車両、先先行車両の挙動に応じて延長されたものとなる。
(もっと読む)
衝突被害軽減装置
【課題】山岳路走行等で衝突被害軽減装置によるブレーキ作動を禁止する。
【解決手段】操舵角θが車速VSPに応じて設定された所定値θ1より大きい所定レベル以上のカーブ走行が、所定値x1以上の頻度xで行われる所定走行状態が検出されたとき、衝突被害軽減装置によるブレーキ作動を禁止するモードを設定し、その後、所定時間内に所定走行状態が再検出されれば、さらに、その時点から所定時間継続して「ブレーキ作動禁止モード」を維持し、所定時間内に所定走行状態が再検出されなければ、「ブレーキ作動禁止モード」を終了する。
(もっと読む)
走行制御システム、制御プログラム、記録媒体
【課題】先行車両への追突を回避可能である安全な走行制御と、自車両に急激な速度変化が生じることのない乗り心地の良好な走行制御とを両立して実現できる走行制御システムを提供する。
【解決手段】走行制御システムは、自車両が現時刻の先行車両の位置に到達するまでの到達時間を分割することで複数の予測区間を設定して(ステップS105)、到達時間の経過時点における自車両の目標加速度を各予測区間毎に算出する(ステップS107)。そして、各予測区間における自車両の予測加速度や、連続する2つの予測区間における操作変化量を入力値とする評価関数を作成して(ステップS108)、評価関数の出力値が最小となる入力値を求める一般化予測制御に基づき、各予測区間における自車両の加速度を取得して(ステップS109)、取得値に現時刻以降の自車両の加速度を制御する(ステップS110)。
(もっと読む)
視線技術、死角インジケータ及びドライバ経験を用いる予測ヒューマン・マシン・インタフェース
【課題】 車両における事故予防システム及び方法を改善すること。
【解決手段】 車両における事故を予防するシステム及び方法を開示する。そのシステムは、ドライバから視線ベクトルを受け取る視線検知器を備える。そのシステムは、近隣の複数の物体の位置及びそれらの速度を検出する近接センサをさらに備える。車両事故リスクを、その近隣の物体の位置及び速度に基づいて判定する。さらに、車両の周囲の状況に関するドライバの認識を、その近隣の物体の位置及び速度に加えて、視線位置にも基づいて判定する。そのドライバの認識及びその車両事故リスクに応じて、車両警報を起動する。
(もっと読む)
走行支援装置
【課題】障害物までの距離を精度良く検出し、適切な停車位置の案内を行うことができる走行支援装置を提供する。
【解決手段】振動センサ10によって検出された実際の振動パターンと、記憶部33に予め記憶された規定パターンとが一致するか否かを振動パターン判断部31が判断する。振動パターン判断部31によって、振動パターンと規定パターンとが一致すると判断された場合には、車両100の走行路上に輪留め300が存在するものとして、報知判断部34がスピーカ40を通じて輪留め300の存在を報知する。これにより、走行路500から入力される実際の振動パターンに基づいて、輪留め300の存在を正確に検出することができ、車両100の運転者に対して、適切な停車位置の報知を行うことが可能となる。
(もっと読む)
運転支援装置
【課題】衝突判定における判定精度を向上させる運転支援装置を提供することを課題とする。
【解決手段】自車両と他車両との衝突の可能性を判定する運転支援装置であって、自車両と他車両との相対距離Dr及び相対速度Vrを用いて衝突予測時間TTCを算出する第1算出手段と、自車両と他車両との相対距離Dr、相対速度Vr及び相対加速度Arを用いて第2衝突予測時間TTC2ndを算出する第2算出手段と、第2衝突予測時間TTC2ndが実数の場合にのみ衝突予測時間TTC及び第2衝突予測時間TTC2ndの少なくとも一方を用いて自車両と他車両との衝突の可能性を判定する衝突判定手段を備えることを特徴とする。
(もっと読む)
車両運動制御装置及び車両運動制御プログラム
【課題】簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を導出する。
【解決手段】記憶された自車両と目標位置との間の距離のx成分Xeとy成分Yeとの比で定めた第1のパラメータ、自車両の速度のx成分vx0とy成分vy0との比で定めた第2のパラメータ、及び目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を求めるために導入した第1の導入パラメータν1の関係を定めた第1のマップ、第1のパラメータ、第2のパラメータ、及び第2の導入パラメータν2の関係を定めた第2のマップ、並びに第1のパラメータ、第2のパラメータ、及び目標位置に到達する時刻teの関係を定めた第3のマップと、現在の自車両と目標位置との間の距離及び自車両の速度に基づいて演算された第1のパラメータ、第2のパラメータとを用いて車体合成力を導出する。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置の誤動作を低減する。
【解決手段】GPS装置により測位された現在位置Pcから所定距離D内に、障害物測定波を反射して障害物として誤測定される可能性がある停止物の位置Psが存在するか否を判定する(S8〜S11)。また、車両進行方向に位置する障害物との相対速度V及び障害物までの距離Lに基づいて、障害物に衝突するまでの衝突時間tを演算する(S16〜S18)。そして、現在位置Pcから所定距離D内に停止物の位置Psが存在せず、且つ、衝突時間tが所定閾値t2以下となったときに、ブレーキを自動的に作動させる。このため、予め記憶されている停止物の位置Psの近傍ではブレーキが自動的に作動しないことから、ブレーキの誤作動を低減することができる。
(もっと読む)
前面衝突時オーバーラップ量制御装置
【課題】前面衝突時オーバーラップ量制御装置に関し、運転者の操舵操作等による衝突回避の可能性を確保しながら、衝突した場合の運転者の衝突被害を軽減することができるようにする。
【解決手段】自車両2の前方に衝突可能性のある障害物3が検知された場合に自車両2を横移動させ、障害物3との前面衝突時のオーバーラップ量を制御する装置において、自車両前部に運転者以外に乗員がおらず、また、運転者による衝突回避とみなせる操舵操作がなく、また、自車運転席前部Aを含むオーバーラップ部分OLでの障害物3との衝突が予測され、さらに、自車両2を横移動させた際オーバーラップ部分OLのオーバーラップ量がゼロになる回避スペースがあると判断された場合に、上記オーバーラップ量をゼロにする方向に自車両2を横移動させる。
(もっと読む)
自動停止制御装置及び道路交通情報システム
【課題】自動停止制御装置及び道路交通情報システムに関し、信号機の全赤時間における交差点内の通過を抑制しながら車両をスムーズに通行させる。
【解決手段】インフラ情報検出手段6aで自車両の前方の交差点における出口地点の位置を検出し、信号情報検出手段6bで該交差点で黄色信号が終了するまでの第一時間を検出し、自車両情報検出手段6dで該自車両の位置及び車速を検出する。
また、距離算出手段8aにより、該出口地点の位置と該自車両の位置とに基づいて該出口地点までの第一距離を算出する。
さらに、予測判定手段8bにより、該第一時間と該第一距離と該車速とに基づいて、該黄色信号が終了するときに該自車両が該交差点から脱出するか否かを予測判定する。
該自車両が該交差点から脱出しないと予測された場合には、自動制動手段9により、該自車両の自動制動を実施する。
(もっと読む)
群走行制御装置及び群走行制御方法
【課題】処理負荷を抑えつつ群の挙動を乱さないような干渉回避行動を行う。
【解決手段】自車両M0を囲うように設定されて他車両との干渉を少なくとも規定の進行方向変更からなる回避行動で回避可能な干渉回避エリアAR−1を有すると共に、自車両M0の周囲に位置する他車両と車車間通信をしながら群走行を行う群走行制御装置である。上記進行方向変更による回避量は、上記干渉回避エリアAR−1において、自車両M0の側方位置に比較して、自車両M0の前方位置が大きく設定する。自車両M0に対する相対距離が小さな他車両を干渉回避対象として選択する。干渉回避対象が自車両M0の干渉回避エリアAR−1のどの位置に侵入したかを検出する。検出された干渉回避対象の位置、及びその干渉回避対象が位置する干渉回避エリアAR−1内の位置に応じた進行方向変更の回避量に基づき、上記干渉回避対象に対し、自車両M0の回避動作を行わせる。
(もっと読む)
自動制動装置
【課題】自動制動装置に関し、簡素な構成で、先行車両の急制動時に適切に自動制動制御を実施する。
【解決手段】先行車両の灯火装置の画像を撮影する撮像手段5と、撮像手段5で撮影された該画像に基づき、該先行車両における緊急制動操作の有無を判定する緊急制動判定手段3と、緊急制動判定手段3において該緊急制動操作であると判定された場合に、自車両の自動制動を実施する自動制動手段4とを備える。
該緊急制動判定手段3において、該灯火装置の点滅周期を検出する点滅周期検出手段1aと、点滅周期検出手段1aで検出された該点滅周期に基づき、該灯火装置におけるフラッシングの有無を判定するフラッシング判定手段1bとをさらに設ける。
(もっと読む)
車両の制御装置
【課題】ブレーキペダルの操作量が比較的少ない操縦者が車両を操縦している場合であっても、所定位置で車両を停止させるために必要な制動力を発生させる。
【解決手段】車両の制御装置(100)は、車両(1)に搭載され、ブレーキペダル(22)の踏下操作に応じて制動力を発生する制動力発生手段(21)と、ブレーキペダルの踏下速度を検出する踏下速度検出手段(21)と、検出された踏下速度に応じて、発生された制動力を変更する制動力補正手段(21)とを備える。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】運転者の運転意図に反した加減速が行われることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両と前方障害物との余裕時間に基づいて自車両のリスクポテンシャルを算出し、リスクポテンシャルが大きいほどアクセルペダルを操作するときに発生する操作反力を増大させる。またリスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに制動力を増大させる。リスクポテンシャルに応じた制駆動力制御を行う場合に、加速意図の場合は加速抑制までを許可し、一定意図の場合はエンブレまでを許可し、エンブレ意図の場合は緩減速制御までを許可し、緩減速意図の場合は減速制御までを許可し、減速意図の場合は運転者のブレーキペダル操作と制動制御との加算処理までを許可するように、制駆動力制御の作動スケジュールを変更する。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。併せて、上記の2つの制御を簡素なブレーキアクチュエータの構成にて実現する。
【解決手段】
車輪のホイールシリンダのうちの2つのホイールシリンダを連通接続する液圧的に分離された一対の液圧路と、この一対の液圧路の各々の液圧を別個に且つ連続的に制御するリニア調圧弁と、リニア調圧弁とホイールシリンダとの間に設けられた切換弁とを備え、回避制御中に安定化制御が開始された場合、選択ホイールシリンダを含まない第1液圧路のホイールシリンダに対する回避制御による液圧を、リニア調圧弁によって制御し、選択ホイールシリンダを含む第2液圧路のホイールシリンダに対する安定化制御による液圧を、リニア調圧弁及び切換弁によって制御する。
(もっと読む)
81 - 100 / 297
[ Back to top ]