
Fターム[3D246GB30]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795) | 余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB30]に分類される特許
41 - 60 / 297
車両運動制御装置
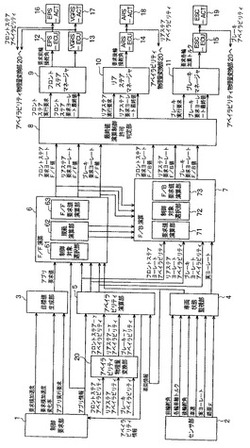
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をVLP、より詳しくはVLPのF/F演算部6やF/B演算部7に伝え、アベイラビリティに基づいて車両横方向運動制御に使用する制御対象の優先順位を決定する。このように、各制御対象のアベイラビリティを加味して車両横方向運動制御に使用する制御対象の優先順位を決定しているため、制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
情報処理装置

【課題】道路の勾配を考慮した運転支援を行う。
【解決手段】情報処理装置1Aは、運転者による減速行動を検出する減速行動検出部21と、走行している道路の勾配情報を取得する勾配情報取得部22と、勾配情報を学習する勾配情報学習部23と、を備え、勾配情報学習部23は、減速行動検出部21により減速行動を検出した場合、所定の間、勾配情報取得部22により取得された勾配情報を学習する。
(もっと読む)
制動装置
【課題】運転者に違和感を与えることがなく、またペダル踏み間違いやシフトレバーの入力ミス等による運転者の意思に反した車両挙動を高精度に検出するとともに、最適なタイミングで最適な制動力を付与できる制動装置を提供する。
【解決手段】走行状態判定部が前進位置を判定するとともに、アクセルペダルの踏み込み速度が第1速度閾値Vf以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに所定制動力で車両を制動し、走行状態判定部が後退位置を判定するとともに、アクセルペダルの踏み込み速度が第2速度閾値Vb以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに、所定制動力で車両を制動することを特徴とする。
(もっと読む)
車両の運転支援装置
【課題】自動ブレーキの介入後に起こり得る二次災害に対しても適切な安全対策を講じることができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、衝突防止制御による自動ブレーキの介入によって自車両1が停車したことを判定したときハザードランプ20の点滅を開始し、当該点滅を、予め設定されたドライバの操作入力が行われるまでの間継続する。これにより、自車両1の急停車によってドライバが混乱している場合にも後続車等に対して注意喚起を行うことができ、自動ブレーキの介入後に起こり得る二次災害に対する適切な安全対策を講じることができる。
(もっと読む)
衝突被害軽減装置
【課題】車両が障害物に衝突するおそれがある場合にブレーキを自動的に作動させる衝突被害軽減装置の作動精度を向上すること。
【解決手段】車両1が進行方向上の障害物に衝突するおそれがあると判定した場合に、車両1のブレーキ2を自動的に作動させる衝突被害軽減装置100であって、車両1の進行方向の画像を撮像するカメラ10と、カメラ10によって撮像され画像から車両1が走行車線を逸脱するか否かを判定する車線逸脱判定部42とを備え、車線逸脱判定部42によって車両1が走行車線を逸脱すると判定された場合には、ブレーキ2の自動的な作動を停止することを特徴とする。
(もっと読む)
対向車線横断時の障害物回避装置
【課題】自車両が対向車線を横断する際、対向車線横断後の障害物との衝突を回避しつつ、対向車線を走行する対向車両の走行妨害を回避し、また、対向車両との衝突を回避する障害物回避装置を提供する。
【解決手段】本発明の障害物回避装置は、対向車線横断後の障害物を検知する障害物検知手段と、対向車線の領域を推定する対向車線領域推定手段と、障害物との衝突を回避する要求減速度を算出する減速度算出手段と、要求減速度に基づいて自車両の停止位置を推定する停止位置推定手段と、自車両の停止位置と対向車線の領域とに基づいて対向車線の領域内に自車両が停止するか否かを判定する判定手段と、対向車線の領域内に自車両が停止すると判定された場合、自車両の要求減速度を補正する減速度補正手段とを備える。
(もっと読む)
走行支援装置
【課題】車両の前方の検出領域において、車両の進路に向かって横方向から検出領域に進入した物体を極力速く検出して警報を指令するとともに、誤検出を考慮して不適切な衝突回避の実行を防止する走行支援装置を提供する。
【解決手段】走行支援装置は、検出領域の外部から検出領域に、車両の進路に向かって横方向から進入した物体の横移動速度が所定速度以上であり、かつ物体と車両との距離が所定距離以下である場合(S402:Yes)、検出領域の範囲内で通常警報領域の側方に通常警報領域よりも横方向に広がる拡張警報領域を設定する(S408)。車両支援装置は、通常警報領域の外部の拡張警報領域の範囲内であれば(S410:No)、運転者によりブレーキ操作およびステアリング操作がなされておらず、車両と物体との衝突予測時間が所定の警報時間以下の場合(S412:Yes)、運転者に対する警報だけを車両制御ECUに指令する(S414)。
(もっと読む)
車両用情報処理装置
【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
車両制御装置
【課題】車車間通信によって先行車の走行情報を取得しながら行う自車の走行制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の前方を走行する先行車100の車車間通信情報を取得し、取得した先行車100の車車間通信情報に基づいて自車1の走行状態を制御する車両制御を行う車両制御装置であって、車両制御時のパラメータに応じて、車車間通信の制御を変化させる。これにより、車車間通信の制御の状態に応じて自車1の走行制御の形態を切替える頻度を低減させることができる。この結果、車車間通信によって先行車100の走行情報を取得しながら行う自車1の走行制御を、より適切に行うことができる。
(もっと読む)
車両制御装置
【課題】より適切な自車の減速を行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御において先行車100が減速した際に、先行車100の減速前の先行車100と自車1との車間時間が経過するまでに、取得した走行情報における先行車100の減速度と同じ大きさの減速度を自車1に発生させる。これにより、先行車100の減速中に先行車100に追突することなく、自車1を減速させることができる。また、車間時間が経過するまでに先行車100の減速度と同じ大きさの減速度を自車1に発生させることによって減速を行うので、必要以上に減速を行わないので、自車1の後方に他の車両が走行している場合でも、後続車に対する影響を低減することができる。
(もっと読む)
車両用の電子制御システム及び車両システムで運転者に依存しない少なくとも1つの介入を算出する方法
【課題】車両が物体との衝突を回避する電子制御システム及び方法を提供する。
【解決手段】リスクコンピュータによって、車両システムへの運転者に依存しない少なくとも1つの、しかしながら特に多数の介入を算出する方法。プリセットされている車両データ,環境データ,実際の車両及び運転者のデータ,車両内外の人のデータ等が、このリスクコンピュータの入力部に入力される。このリスクコンピュータは、これらのデータに基づいて車両とこの車両の内側及び外側にいる人との危険状況を評価しこの評価及び場合によってはその他の基準値又は重み付けに応じて、アクチュエータを制御する制御信号を出力する。人及び車両に対する最大の保護作用が、優先回路にしたがって得られるように、これらのアクチュエータは、車両の運転者の行動及び/又は乗客の保護及び/又はその他の道路使用者(歩行者,自転車に乗る人等)に対する保護手段を変更又は起動する。
(もっと読む)
車両用制動支援装置及び車両用制動支援方法
【課題】自車両前方の障害物XMに対する運転者の支援を、運転者の意図に応じてより適切に実施することを目的とする。
【解決手段】自車両前方の障害物XMに対する自車両MMのリスクポテンシャルが、予め設定した第1の閾値Th1より高く且つアクセルペダル22が操作されていないと判定すると、自車両MMに制動力を付与する。さらに、自車両前方の障害物XMに対する自車両MMのリスクポテンシャルが、第1の閾値Th1よりもリスクポテンシャルが高い第2の閾値Th2よりリスクポテンシャルが高いと判定すると、アクセルペダル22の操作状態に関わらず自車両MMに制動力を付与する。
(もっと読む)
ブレーキ制御装置
【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
車両運転支援装置
【課題】交差点に進入しようとする車両の運転者の操作を尊重し運転者による操作を妨げないようにする車両運転支援装置を提供する。
【解決手段】交差点60での一時停止見落とし等を原因とする出会い頭シーン等での事故発生シーンを想定すると、一般に、非優先車両12nは車速Vが低く、優先車両12pは車速Vが高いことが推定される。自車12が優先車両(優先側車両)12pで、車速Vが所定値(例えば、20[km])より低い場合には予圧をかけ車速Vが所定値より高い場合では予圧を少なく(ゼロを含む)することで、的確なブレーキ予圧を付与することができる。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
衝突回避支援装置
【課題】 運転者の衝突回避行動に応じた適切な衝突回避支援を実現できる衝突回避支援装置を提供する。
【解決手段】 衝突回避支援装置は、自車速Vを検出する車速センサ1と、障害物のX方向(自車進行方向に対し横切る方向)への動きである障害物移動状態(移動速度Vp)を検出するレーザレーダ4、カメラ5および画像処理装置6と、自車速Vと障害物移動状態(移動速度Vp)とに基づいて、制動回避制御と操舵回避制御の重み付けを設定する重み付け設定部11aと、を備える。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】障害物を回避直後の速度方向及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を求めるために導入した第1の導入パラメータν1の特定仮定下での値ν1’との関係、第2の導入パラメータν2の特定仮定下での値ν2’との関係、障害物の回避に要する時間teの特定仮定下での時間te’との関係を定めた最短3次元マップを用いて、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を導出する。
(もっと読む)
車両用制御装置
【課題】運転者特性を学習することにより適切なタイミングで警報を出すことができ、学習の機会を多くして学習の進行を早くする。
【解決手段】車両用制御装置において、ブレーキ操作を検出するブレーキ操作検出手段と、障害物と車両との接近方向の相対速度を算出する相対速度算出手段と、接近方向の相対速度が予め設定された値以上であるか否かを判定する相対速度判定手段と、接近方向の相対速度が予め設定された値以上であると判定された時には、接近方向の相対速度が発生してからブレーキ操作が検出されるまでの時間を計測する時間計測手段と、計測された時間に基づいて運転者特性の学習値を演算する学習値演算手段と、演算された運転者特性の学習値に基づいて、警報手段により警報を出力する警報作動タイミングを変える警報タイミング演算手段とを備える。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
41 - 60 / 297
[ Back to top ]