
Fターム[3D246GB32]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | カーブに備えた安全車速への減速 (114) | 減速度の制御 (58)
Fターム[3D246GB32]に分類される特許
1 - 20 / 58
車体速度制御装置
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
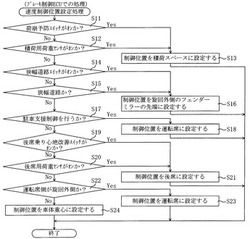
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
車両用制動制御装置

【課題】従来よりも適切な車両の制動制御を可能とする車両用制動制御装置を提供する。
【解決手段】自車両と障害物との衝突の危険性に応じて自動的に車両を制動する車両用制動制御装置であって、自車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、衝突判定手段によって自車両と障害物との衝突の危険性が高いと判定された場合、自車両に自動的に制動力を発生させる自動制動手段と、自動制動手段が発生させる制動力の大きさを自車両のドライバーの操舵操作に応じて漸減する制動力漸減手段とを備え、制動力漸減手段は、制動力の漸減速度を自車両のドライバーのアクセル操作に応じて速くすることを特徴とする。
(もっと読む)
車両の運動制御装置
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
車両制御装置
【課題】 減速装置の応答遅れに伴うブレーキの引きずり感を抑制できる車両制御装置を提供する。
【解決手段】 ドライバのステアリング状態を検出する操舵角センサ112と、検出されたステアリング状態に基づいて車両に減速度を与えるブレーキECU102と、を有し、ブレーキECU102は、ステアリングホイールが第1の方向に操舵されたとき、検出されたステアリング状態に基づいてブレーキ液圧ユニット101を作動させて車両に減速度を与える減速制御部(ステップS4)と、ステアリングホイールが第1の方向に操舵された後に第1の方向と反対方向に操舵されたとき、ブレーキ液圧ユニット101による減速度を抑制する減速抑制制御部(ステップS6)と、を備えた。
(もっと読む)
車両制御装置
【課題】 カーブの走行安定性をより高めることができる車両制御装置を提供する。
【解決手段】 先行車と自車との相対関係を維持または設定された速度を維持するように自車の速度を制御するACC制御のACC指令値Gaccを演算するACC指令値演算部201と、自車に作用する横加加速度Gy'に基づき自車の速度を制御するGFC制御のGFC指令値Ggfcを演算するGFC指令値演算部202と、ACC指令値GaccまたはGFC指令値Ggfcのうち車両に作用する減速度の大きな指令値を選択する指令値選択部203と、選択されたACC指令値GaccまたはGFC指令値Ggfcに基づいてブレーキ液圧ユニット101およびエンジン121を駆動し自車の速度を制御する速度制御部204と、を備えた。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
カーブ進入制御装置
【課題】実際に走行する分岐先道路に適した制動警報を行うことにより、ドライバへの違和感を軽減する。
【解決手段】高速道路の分岐路を進む際のカーブ進入制御装置であって、この装置は、自車前方の本線道路の分岐である分岐情報及び自車位置情報と、走行中の道路を撮像する撮像手段により検出した走行車線情報に基づいて、前方分岐における走行予定車線を推定する走行予定車線推定手段(S30)と、走行予定車線推定手段により推定された走行予定車線に基づいて、制動警報を作動させるか否かを判断する制動警報判断手段(S110)とを備える。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
制駆動力制御装置
【課題】車両がコーナを脱出する際のエンジンブレーキや回生ブレーキ等による無駄な減速を抑制し、なおかつ想定以上に下がってしまった車速を回復する際の無駄なエネルギー消費を抑制するために、車両の減速度を徐減することができる制駆動力制御装置を提供することを課題とする。
【解決手段】ECUは、車両のカーブ脱出時に、車両の非旋回時用に設定された減速度である非旋回減速度より小さくなるまで、車両の減速度を減少させる。
(もっと読む)
車両用運動制御装置
【課題】ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行う車両用運動制御装置を提供する。
【解決手段】ステアリング制御とブレーキ制御のいずれをメインに行うかを選択し、その選択結果に基づいて、メインとされる側に対して行わせる車両旋回運動の要求値を出力すると共に、メインとされない側に目標値とメイン側要求値との差に応じた要求値を出力することで、ステアリング制御とブレーキ制御それぞれの配分を適切に設定する。これにより、ステアリング制御をメインとしつつブレーキ制御による補助を行うことが可能となるため、ステアリング制御のみの場合よりも目標値追従性を向上させた車両運動制御が行える。そして、ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行うことが可能となる。
(もっと読む)
車両の制御装置
【課題】自動車等の車両において、好適に減速制御を実行する。
【解決手段】車両の制御装置は、減速対象地点における運転者の減速行動を学習する学習手段(210)と、車両が減速対象地点に接近している場合に、学習された減速条件を用いて減速制御を行うべきか否かを判定する判定手段(220)と、減速制御を行うべきと判定された場合に、学習された減速行動に応じた減速制御を行う減速制御手段(230)と、減速制御を行うべきでないと判定された場合に、運転者による減速操作及び該減速操作の終了を検出する減速操作検出手段(130)と、減速操作が終了した時点から、減速操作を引き継ぐと共に減速制御を完了させるべき減速目標地点までの減速を補完するような減速パターンを演算する演算手段(240)と、減速パターンに応じた補完減速制御を行う補完減速制御手段(250)とを備える。
(もっと読む)
走行支援装置
【課題】車両前方の障害物に関する情報を、道路状況に応じて適切なタイミングで提供する。
【解決手段】障害物の発生位置に基づき目標停止位置Xstopを算出し(ステップS21)、道路形状に基づき自車両が目標停止位置Xstopに至るまでの車速パターンを作成し、この車速パターンで走行する際の運転者の操作負荷量Wloadを、加減速負荷量、操舵負荷量等の身体負荷量と、前方注視負荷量、確認負荷量等の認知負荷量とから予測する(ステップS22)。操作負荷量Wloadがしきい値を超える区間を運転負荷増大区間とし、この区間に目標停止位置Xstopに基準減速度Ginfoで停止するための情報提供位置Xinfoが含まれる場合には、運転負荷増大区間の開始点から所定量だけ自車両よりの位置での車速に基づき、自車両が目標停止位置Xstopに停止するための必要減速度Greqがしきい値を超えているかを判定し、しきい値をこえているときに障害情報の提供を行う。
(もっと読む)
減速支援システム
【課題】車両の運転者の意図に沿った減速支援制御を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が交差点に進入することを検知する第1検知手段(109)と、車両が交差点に進入した際に、減速制御開始条件が成立したことを条件に、減速支援制御を行う第1減速支援手段(109)と、車両が交差点を右折又は左折するか否かを判定する右左折判定手段(109)とを備える。車両が交差点を右折又は左折すると判定された場合、第1減速支援手段は、車両の運転者が、車両を右折又は左折させるためにハンドルを操舵した方向とは反対方向にハンドルを操舵し始めたタイミングで、減速支援制御を終了する。他方、車両が交差点を右折又は左折しないと判定された場合、第1減速支援手段は、運転者が、アクセルオフからアクセルオンにしたタイミングで、減速支援制御を終了する。
(もっと読む)
車両用運転支援装置
【課題】運転者の運転感覚に合致した最適な自動減速制御を行なうことが可能な車両用運転支援装置を提供すること。
【解決手段】車両が特定の位置を走行する際に自動減速制御を行なう制御手段を備える車両用運転支援装置であって、運転者のアクセル操作を検出するアクセル操作検出手段と、前記運転者のブレーキ操作を検出するブレーキ操作検出手段と、を備え、前記制御手段は、前記アクセル操作検出手段及び前記ブレーキ操作検出手段の検出結果を参照して前記運転者が一連の特定操作を行なったと判定した場合に、該一連の特定操作に含まれる操作の行なわれたタイミングを学習し、該学習したタイミングに基づいて、前記自動減速制御の制御区間を決定することを特徴とする、車両用運転支援装置。
(もっと読む)
車両挙動制御装置
【課題】運転者への違和感が小さくできる車両挙動制御装置を得る。
【解決手段】ハンドルの操舵角を検出又は推定する操舵角検出手段と、車両の速度を検出する車速検出手段と、操舵角検出手段の出力である操舵角の0近傍に制御不感帯を有し、操舵角検出手段の出力である操舵角に対して、低車速側では制御不感帯幅を大きく、高車速側では制御不感帯幅を小さく設定し、車速検出手段の出力である車速に応じた制御不感帯幅を出力する制御不感帯幅設定器と、操舵角検出手段の出力である操舵角の絶対値が制御不感帯幅設定器の出力である制御不感帯幅で設定される操舵角の絶対値の上限より大きい場合に車両の減速制御用出力を発生する車両減速制御実施判断器とを備え、車両減速制御実施判断器の前記減速制御用出力により車両の減速制御を実施する
(もっと読む)
道路形状検出装置、走行制御装置、及び道路形状検出方法
【課題】認識しているカーブ数のハンチングを抑制する。
【解決手段】各カーブ区間の入口補間点について、演算周期における前回の演算結果と比較し、カーブ区間数が変動しているか否かを判定し(ステップS5)、カーブ区間数が変動していたら、前回のカーブ情報と自車両の移動量とに基づいて、今回のカーブ情報を補正する(ステップS6)。先ず、カーブ区間が減少しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ増加させる。一方、カーブ区間が増加しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ減少させる。すなわち、今回のカーブ情報を、前回の配列に戻す補正を行うことで、前回のカーブ区間数を保持する(ステップS62)。
(もっと読む)
車両の速度制御装置
【課題】車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の速度制御装置を提供すること。
【解決手段】車両の前方における車両が走行している道路上の複数の位置データ(ノード点)Nd[n]が取得され、各ノード点Nd[n]における道路の屈曲度Rc[n]が演算される。この屈曲度Rc[n]に基づいて、カーブ内屈曲度一定区間Cr#が識別され、Cr#についてのカーブ内一定屈曲度Rm#、及びカーブ端点位置Px#が決定される。車両の実車速Vxa、カーブ内一定屈曲度Rm#から演算される適正車速、及び、カーブ端点位置Px#に基づいて、運転者による加減速操作がなされない場合においても、車両がカーブを適正に通過するためにカーブ減速制御が実行される。即ち、カーブ内において最も屈曲度が大きい区間の開始地点、及びその区間の一定屈曲度に基づいてカーブ減速制御がなされる。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。併せて、上記の2つの制御を簡素なブレーキアクチュエータの構成にて実現する。
【解決手段】
ホイールシリンダのうちの2つのホイールシリンダを連通接続する第1液圧路と、第1液圧路に接続する2つのホイールシリンダとは異なる残りの2つのホイールシリンダを連通接続する第2液圧路と、第1及び第2液圧路の制動液圧を調整する第1及び第2調圧手段とを備え、緊急回避制御の実行と前記安定化制御の実行とが同時に行われる場合、緊急状態量取得手段によって取得される緊急状態量に基づいて第1調圧手段を制御するとともに、ステア特性量取得手段によって取得されるステア特性量に基づいて第2調圧手段を制御する。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に望ましくない車両の走行状態を回避することで走行安全性の向上を図る。
【解決手段】車両の走行状態に基づいてドライバにとって望ましくない領域、即ち、ジレンマゾーンへの車両の進入を予測する車両進入予測手段(車両走行状態検出手段)と、ドライバにとって望ましくない領域への車両の進入を回避するように出力を調整する出力調整手段とを設ける。
(もっと読む)
1 - 20 / 58
[ Back to top ]