
Fターム[3D246HA54]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ウインカ操作 (71)
Fターム[3D246HA54]に分類される特許
1 - 20 / 71
走行支援装置及び方法
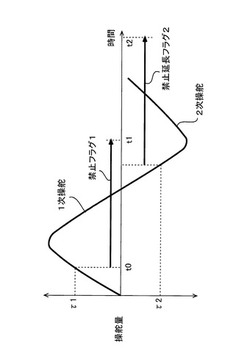
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
衝突回避装置

【課題】本発明は、運転者が意図しない進路変更において、対象物を回避し、当該対象物との衝突を未然に防止することのできる衝突回避装置を提供する。
【解決手段】ドライバによりステアリングが操作され(S10)、ドライバによりウインカーレバーが操作されないと(S12)、自車両の進路予測を行い(S14)、自車両の走行している走行レーンが認識不可能な場合(S16)、或いは自車両の走行している走行レーンが認識可能であってもドライバのステアリング操作により走行レーンを逸脱する虞がない場合(S24)に自車両の進路上に衝突対象物があれば(S18)、スピーカより警報を発声し(S20)、更に衝突対象との衝突を回避するように操舵アシスト及びブレーキ操作アシストを作動する(S22)。
(もっと読む)
車両のブレーキ装置
【課題】後扉を開けた状態やアイドリングストップの作動によってストールトルクが発生しなくなった状態で、車両が動き出さないように保持できるとともに、車両の停車と同時に作動し、作動時における衝撃を緩和することができるブレーキ装置を提供する。
【解決手段】フロント側ブレーキブースタとを接続する第1のエア管路と、リア側ブレーキブースタとを接続する第2のエア管路と、エアタンクとフロント側ブレーキブースタとを接続する第1のバイパスエア管路と、エアタンクとリヤ側ブレーキブースタとを接続する第2のエア管路と、エア管路に設けたブレーキバルブと、を有し、前記第1のバイパスエア管路上の第1のブレーキコントロール側バルブ及び前記第2のブレーキコントロール側バルブを、前記車両のアイドリングストップ時に所定時間ずらしたタイミングで開放するタイムラグリレーを設けた。
(もっと読む)
車両制御装置および車両制御方法
【課題】レーン移動動作を行う際に車両の姿勢を安定させることができなかった。
【解決手段】自車両の移動先の目標レーンを示す情報を含む推奨経路情報と、前記自車両が走行している自車走行レーンを示す情報を含む自車位置情報とを取得し、前記自車走行レーンが前記目標レーンと異なる場合に、前記自車両がレーン移動動作を行う予定であることを予測するレーン移動予測手段と、前記自車両がレーン移動動作を行う予定であると予測された場合に、前記自車両の姿勢を安定させるための安定制御を開始させるための開始条件を満たすか否かを判定する開始条件判定手段と、前記開始条件を満たすとき、前記安定制御を開始させる安定制御手段と、を備え、前記開始条件判定手段は、前記自車両がレーン区画線を跨いだ場合に前記開始条件を満たすと判定する。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
自動ブレーキ装置
【課題】自動ブレーキの不要な作動をより早い段階で抑制する。
【解決手段】ブレーキ機構2を作動させるアクチュエータ3と、アクチュエータ3の作動を制御する制御手段1とを備えた自動ブレーキ装置において、車両の前方を走行する先行車両の情報を検出する車両前方情報検出手段4,5と、前方情報に基づき車両と先行車両とが衝突する可能性を予測する衝突予測手段1aと、前方情報に基づき、先行車両が車両の走行領域から外れるか否かを予測する先行車両走行予測手段1bと、車両と先行車両とが衝突を回避できるか否かを判定する衝突回避判定手段1cと、を備える。制御手段1は、衝突予測手段1aにより衝突可能性があると予測されたら、衝突回避判定手段1cにより衝突を回避できると判定されない限りアクチュエータ3を作動させ、衝突を回避できると判定されたら、アクチュエータ3を非作動にする。
(もっと読む)
車両の運転支援装置
【課題】自動ブレーキの介入後に起こり得る二次災害に対しても適切な安全対策を講じることができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、衝突防止制御による自動ブレーキの介入によって自車両1が停車したことを判定したときハザードランプ20の点滅を開始し、当該点滅を、予め設定されたドライバの操作入力が行われるまでの間継続する。これにより、自車両1の急停車によってドライバが混乱している場合にも後続車等に対して注意喚起を行うことができ、自動ブレーキの介入後に起こり得る二次災害に対する適切な安全対策を講じることができる。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
車線逸脱防止装置
【課題】ブレーキ冷間時のブレーキ制動力低下の影響を抑制して、車線逸脱防止制御として所望のヨーモーメントを自車両に付与する。
【解決手段】車線逸脱防止装置は、エンジンの始動状態(ステップS31、ステップS32)、ブレーキの作動状態(ステップS34)、ワイパーの作動状態(ステップS37)、外気温及び自車速の状態(ステップS39)に基づいて、制動力発生手段の温度を評価するブレーキエネルギ評価指標値Ecbrを算出し(ステップS41)、そのブレーキエネルギ評価指標値Ecbrに基づいて、車線逸脱防止制御の制御量としての目標ヨーモーメントを補正する(ステップS41、ステップS42)。
(もっと読む)
車両制御装置
【課題】ドライバの走行特性に合致した逸脱判定を行うことが可能な車両制御装置を提供する。
【解決手段】車両制御装置1では、走行軌跡情報取得センサ2によって、車両10と該車両10の一側方側における認識可能な白線Lとの間の距離Xが検出される。そして、ECU5により、距離Xの平均値μ及び分散値σに基づいて、車両10が一側方側と反対の他側方側に移動した際の車両10の逸脱判定が行われる。これにより、車両制御装置1によれば、ドライバの走行軌跡の特徴を逸脱判定に好適に反映させることができる。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
走行支援装置
【課題】自車両が走行車線を離れる際に警報を行うことで安全走行を支援する走行支援装置において、車線変更時の安全性を向上させること。
【解決手段】後続車両が存在するか否かを判定する(S110)。後続車両が存在すると判定された場合には(S110:YES)、運転者に車線変更の意図があるか否かを判定する(S120)。具体的には、ドライバ操作判定部が、ステアリングセンサから入力された自車両のステアリングホイールの操作状態からステアリングホイール操作の有無を判定する。運転者に車線変更の意図があると判定された場合には(S120:YES)、自動ウインカをONに設定するとともに警報ACTによる報知警報をONに設定する(S130)。なお、自動ウインカがONに設定されると作動機能調停部が自動ウインカを作動させ、警報ACTによる報知警報がONに設定されると作動機能調停部が警報ACTを作動させる。
(もっと読む)
走行支援装置
【課題】車両前方の障害物に関する情報を、道路状況に応じて適切なタイミングで提供する。
【解決手段】障害物の発生位置に基づき目標停止位置Xstopを算出し(ステップS21)、道路形状に基づき自車両が目標停止位置Xstopに至るまでの車速パターンを作成し、この車速パターンで走行する際の運転者の操作負荷量Wloadを、加減速負荷量、操舵負荷量等の身体負荷量と、前方注視負荷量、確認負荷量等の認知負荷量とから予測する(ステップS22)。操作負荷量Wloadがしきい値を超える区間を運転負荷増大区間とし、この区間に目標停止位置Xstopに基準減速度Ginfoで停止するための情報提供位置Xinfoが含まれる場合には、運転負荷増大区間の開始点から所定量だけ自車両よりの位置での車速に基づき、自車両が目標停止位置Xstopに停止するための必要減速度Greqがしきい値を超えているかを判定し、しきい値をこえているときに障害情報の提供を行う。
(もっと読む)
運転支援装置
【課題】、方向指示器を作動させた特定車両の挙動を高精度に予測する運転支援装置を提供することを課題とする。
【解決手段】方向指示器を作動させた特定車両(例えば、先行車両)についての旋回タイミングを予測する運転支援装置であって、特定車両の周辺に存在する周辺車両(例えば、先先行車両)の位置を取得する周辺車両位置取得手段と、特定車両が方向指示器を作動させた際の周辺車両の位置に応じて特定車両の旋回タイミングを予測する予測手段を備えることを特徴とし、周辺車両の特定車両との相対距離及び相対速度の少なくとも一方の相対情報を取得する相対情報取得手段を備え、予測手段は、周辺車両の特定車両との相対情報を用いて特定車両の旋回タイミングを予測すると好適である。
(もっと読む)
走行路逸脱防止装置及びそれを備えた車両
【課題】走行路逸脱防止制御において、運転者の操作意図がない状態で車両の走行路逸脱を防止するためアクチュエータが作動した場合に、運転者の操作意図があると誤判断して逸脱防止制御が中断することを防止すること。
【解決手段】各センサやカメラ等の検出手段の結果に基づいて走行路外への逸脱防止制御を行う逸脱防止制御手段と、運転者の操舵意図を判定する運転意思判定手段と、運転意思判定手段からの運転者の操舵意図に基づいてアクチュエータの作動を規制するアクチュエータ作動規制手段とを有し、運転意思判定手段は、検知した操舵トルクの変化量ΔTh及び操舵アクチュエータへの制御指令値の変化量ΔTsとを算出し|ΔTh|−|ΔTs|が閾値以上の場合に運転者の操作意図があると判断して逸脱防止制御の作動を制限する。
(もっと読む)
路外逸脱防止装置
【課題】 路外逸脱防止のための制御に対する効果を十分に得ると共に、路外逸脱防止のための制御の中止に対して運転者に違和感を与えることがない。
【解決手段】 コントローラ1が、走行状態から自車両が走行車線から逸脱するか否かを判断すると共に、自車両が走行する道路上の車線端又は道路境界に設けられ車両に振動を付与するランブルストリップが検出された場合に、車線外への逸脱を回避するように車両システム6により制駆動力を発生させる路外逸脱防止動作を制御する。コントローラ1は、運転者の操作に基づいてベース閾値を路外逸脱防止動作が中止されやすくする低方向に補正し、操作量が閾値を超えた場合に、車両システム6による路外逸脱防止動作を終了させる。
(もっと読む)
走行制御装置
【課題】退出路の手前で退出の意図が検出されても減速を開始せず、退出路の先頭位置を通過してから減速を行う走行制御装置を提供する。
【解決手段】走行制御装置1は、本線110から退出路120への退出意図を検出し、車両2が退出路120の先頭位置123を通過したか否かを判断し、退出意図が検出されかつ車両2が退出路120の先頭位置123を通過したと判断された場合に車速制御部50により減速制御を行わせる。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に違和感のない制御感を与えつつ、支援制御を適切に行うことができる車両運転支援装置及び車両運転支援方法を提供する。
【解決手段】設定時間後の自車両の将来位置を予測する。予測した自車両の将来位置が、予め設定した車線幅方向横位置である制御開始位置よりも自車走行車線の中央からみ外側にあるほど、自車走行車線の中央に向かうヨーモーメントを大きく自車両に付与して自車両を制御する。その際、自車両に付与する前記ヨーモーメントが小さいほど、自車両に大きな減速加速度を付与する。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に与える違和感を低減しつつ、側方障害物に対する支援制御を適切に行うことができる車両運転支援装置及び車両運転支援方法を提供する。
【解決手段】自車両側方の障害物を検出すると、所定時間後の自車両の将来位置を予測する。その予測した自車両の将来位置が所定の車線幅方向横位置に達したとき、制御開始と判定して前記障害物への接近を防止する方向に自車両を制御する。その際、障害物を非検出の状態から検出した状態となったときに、自車両が所定横位置よりも前記障害物側を走行しているとき、自車両が前記所定横位置よりも当該障害物とは反対側を走行しているときと比較して、前記制御開始の判定を抑制する。
(もっと読む)
車両制御システム及び安全確認判定装置
【課題】ドライバモニタカメラから取得するドライバの視点方向と車外カメラから取得する障害物方向とを照合する際に、ドライバの視点方向の情報を安定化して、ドライバが障害物を認識していないとする誤判定を防止する車両制御システムを提供する。
【解決手段】車両制御システム10は、ドライバの視点方向を所定周期で検出するドライバモニタカメラ34fと、角度座標上でのドライバの視点移動速度を検出する視点クラスタ処理部31bと、ドライバの視点の注視期間を検出する視点同定処理部31cと、視点移動速度と注視期間に基づいて算出されるドライバの視野範囲に、車外カメラ32cで検出された障害物方向が含まれるか否かを判定し、ドライバの視野範囲に障害物方向が含まれないと判定された場合に車両制御の実行が可能な安全確認判定部31とを備える。
(もっと読む)
1 - 20 / 71
[ Back to top ]