
Fターム[3D246HA74]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車輪状態 (1,921) | タイヤ状態 (374) | 横力(コーナリングフォース) (54)
Fターム[3D246HA74]に分類される特許
1 - 20 / 54
制駆動力制御装置および制駆動力制御方法
【課題】制振のための制駆動力制御を行う際に、制御介入時の動作をより適切なものとすること。
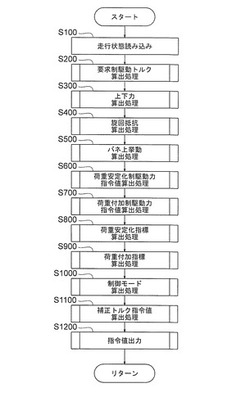
【解決手段】車両における制駆動状態に基づいて、車両に働く荷重を安定化させるための荷重安定化制駆動力指令値を算出する荷重安定化制駆動力指令値算出手段と、車両における操舵状態に基づいて、車両の荷重を付加するための荷重付加制駆動力指令値を算出する荷重付加制駆動力指令値算出手段と、車両の走行状況に基づいて、走行環境の安定度合いを示す荷重安定化指標を算出する荷重安定化指標算出手段と、操舵入力に基づいて、操舵操作の安定度合いを示す荷重付加指標を算出する荷重付加指標算出手段と、荷重安定化制駆動力指令値と、荷重付加制駆動力指令値と、荷重安定化指標と、荷重付加指標とに基づいて、制駆動力制御手段による制駆動力の付与状態を制御するトルク制御手段とを有する制駆動力制御装置とした。
(もっと読む)
車両の横方向運動制御装置

【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、車両の横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために協調して作動する複数の制御対象の横方向運動制御量を演算し、演算した横方向運動制御量に基づいて複数の前記制御対象を制御する。また、複数の前記制御対象の制御を停止するか否かを判断する。複数の前記制御対象の制御を停止すると判断したときに、そのときから複数の前記制御対象の横方向運動制御量が縮退するように、複数の前記制御対象の横方向運動縮退制御量をそれぞれ決定し、決定した横方向運動縮退制御量に基づいて複数の前記制御対象を制御する。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両の運動制御装置
【課題】制御可能範囲が拡大され、よりアクティブな制御介入が実現できる車両の制御装置を提供することを目的とする。
【解決手段】操作状態量及び運動状態量に対応した車両の規範姿勢状態量を、所定の外力が作用する状態における車両の運動モデルにもとづき演算する規範姿勢状態量演算手段54と、路面摩擦係数推定値を含む前記車両の実姿勢状態量を推定する実姿勢状態推定部52と、実姿勢状態量(慣性力)および前後力に基づき路面摩擦係数相当値を決定する路面摩擦係数相当値決定部200と、実姿勢状態推定部が推定した前記路面摩擦係数推定値と前記路面摩擦係数相当値決定部200が決定した路面摩擦係数相当値に基づき、実路面摩擦係数を推定する実路面摩擦係数推定部400とを備えることを特徴とする車両の運動制御装置
(もっと読む)
路面摩擦係数推定装置
【課題】自動車の旋回時におけるタイヤと路面との摩擦係数を、シミュレーションを用いずにリアルタイムで推定することができるとともに、大型の専用車両が必要とせずに簡便な装置とすることが可能であり、更に走行中に運転者の意図しない駆動が行われることがない路面摩擦係数推定装置を提供すること。
【解決手段】自動車の左右のタイヤの回転数を測定する回転数測定手段と、自動車の進行方向を測定する進行方向測定手段と、前記タイヤの実舵角を測定する実舵角測定手段と、自動車の向きを測定する方角測定手段と、前記回転数測定手段、進行方向測定手段、実舵角測定手段、方角測定手段の各測定値に基づいてタイヤと路面の旋回時における摩擦係数を推定する推定手段とを備えていることを特徴とする路面摩擦係数推定装置とする。
(もっと読む)
車線逸脱防止装置
【課題】ブレーキ冷間時のブレーキ制動力低下の影響を抑制して、車線逸脱防止制御として所望のヨーモーメントを自車両に付与する。
【解決手段】車線逸脱防止装置は、エンジンの始動状態(ステップS31、ステップS32)、ブレーキの作動状態(ステップS34)、ワイパーの作動状態(ステップS37)、外気温及び自車速の状態(ステップS39)に基づいて、制動力発生手段の温度を評価するブレーキエネルギ評価指標値Ecbrを算出し(ステップS41)、そのブレーキエネルギ評価指標値Ecbrに基づいて、車線逸脱防止制御の制御量としての目標ヨーモーメントを補正する(ステップS41、ステップS42)。
(もっと読む)
車両運動制御システム
【課題】菱形車輪配置車両の実用性を向上させる車両運動制御システムを提供する。
【解決手段】前輪12Fと後輪12Rとの少なくとも一方を転舵させる転舵装置を制御するための制御装置が有する制御部を、左輪14Lおよび右輪14Rのいずれか一方に目標とされる駆動力と目標とされる制動力との少なくとも一方を付与できない失陥が駆制動装置に生じた場合に、その失陥に起因して生じる車両のヨーイング(ヨーモ−メントMyaw)を抑制すべく、転舵輪12F,12Rとのうちの1以上のものの転舵量を制御するように構成する。それにより、失陥に起因して生じる車両のヨーイングと逆向きのヨーモーメントを発生させ、その失陥に起因するヨーイングを低減させることが可能とされている。つまり、本車両運動制御システムによれば、上記のような駆制動装置の失陥時においても、車両の直進性を確保することが可能である。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
牽引車輌の制御装置
【課題】センサ数の増大を抑制しながら牽引車両の挙動の安定化が可能な制御装置を構成する。
【解決手段】制御装置の安定化制御部23が、トラクタに作用する横加速度GYと、ヨーレートYrと、走行速度Vと、操舵角δとに基づいてヒッチ点に作用するヒッチ点横力Fhを推定するヒッチ点横力推定部23Cを備えている。この安定化制御部23は、推定されたヒッチ点横力Fhと逆方向となる相殺ヨーモーメントを演算する相殺ヨーモーメント演算部23Dと、この相殺ヨーモーメントを出力するヨーモーメント出力部23Eとを備えている。このヨーモーメント出力部23Eはトラクタの車輪の左右の一方に制動力を作用させる。
(もっと読む)
データ通信方法及び車輪の状態検出装置
【課題】信号処理装置やプログラムなどの規模の増大を抑制しつつ、共通の信号線で複数の情報を伝送することができるデータ通信方法を提供する。
【解決手段】矩形波F1の周期により第1の物理量を伝達すると共に、矩形波F1の1周期におけるハイレベル及びローレベルの何れか一方の所定位置に重畳される重畳パルスF3aによって第1の物理量とは異なる第2の物理量を伝達し、各周期における重畳パルスF3aのパルス数によって前周期までに伝達された第2の物理量の増減を表して第2の物理量を伝達する。
(もっと読む)
車両制御装置
【課題】横風を受けている場合に、その横風により生じるヨーモーメントを所望の大きさに制御することにより、車両の実挙動を目標挙動に近づける。
【解決手段】車両が横風を受けている場合に、ヨーモーメントを横力で割った値である比率xの目標比率x*を、実際の車両の挙動が目標挙動となる大きさに決定する。横風は、車両の形状で決まる着力点に作用するため、横風の強さに基づけば横風によって車両に作用する横風ヨーモーメントを取得することができる。そして、アクチュエータが、横風の強さと目標比率x*とを掛けた値である目標ヨーモーメントから横風ヨーモーメントを引いた値である制御ヨーモーメントが付与されるように制御される。その結果、車両の実挙動を目標挙動に近づけることができる。
(もっと読む)
車両制御装置
【課題】車両総重量や車両重心位置の変化に対応させた適切な車両挙動制御を行うこと。
【解決手段】設定した目標制御量又は/及び目標制御タイミングで車両10の挙動制御を行う車両制御装置において、車両総重量を推定又は検出する重量演算手段1eと、車両重心位置を推定又は検出する重心位置演算手段1dと、車両10の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段1cと、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた旋回特性指数値とに基づいて車両10が所望の旋回姿勢となる目標制御量又は/及び目標制御タイミングを設定する旋回制御手段1bと、を設けること。
(もっと読む)
車両横滑り運動状態量推定装置
【課題】摩擦係数や車両の運動状態が変化する過渡期を含めて車両の横滑り運動の状態量の推定精度を高めることができる車両横滑り運動状態量推定装置を提供する。
【解決手段】車輪2−iと路面との間の摩擦特性モデルを含む車両モデルを用い、各車輪2−iの路面反力モデル値Fsubx_i_estm,Fsuby_i_estmを求めると共に横滑り運動状態量モデル値Vgy_predictを求める手段と、路面反力モデル値の合力によって車両の所定の位置(重心点の位置)に発生する横加速度モデル値Accy_estmと実横加速度検出手段15,22fの出力が示す横加速度検出値Accy_sensとの偏差Accy_errを求める手段と、偏差Accy_errをハイカット特性のフィルタ24d1に通した値を横滑り運動状態量モデル値に加えてなる値を横滑り運動状態量の推定値Vgy_estmとして決定する手段とを備える。
(もっと読む)
路面摩擦係数推定装置
【課題】車両の所定のヨー軸周りのモーメントの推定値を用いて路面の摩擦係数の推定を行う場合に、路面の摩擦係数の推定値の信頼性や安定性をさらに向上させる。
【解決手段】車両1のヨー軸周りの外力モーメントの第1推定値Mz_estm_kを求める手段(S102〜S116,S118−4)と、第2推定値Mz_sens_kを求める手段(S118−3)と、偏差(Mz_sens_k−Mz_estm_k)を“0”に収束させるように路面摩擦係数の推定値の増減操作量Δμ_kを決定する手段(S118−6)とから成る基本処理手段31_kを複数備え、Δμ_kに応じて路面摩擦係数の推定値を更新する。基本処理手段31_kのそれぞれに対応するヨー軸は互いに異なる位置に設定される。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】路面摩擦係数に対して高い精度で推定対象の値を得る。
【解決手段】車両接地面摩擦状態推定装置は、基準路面摩擦係数とは異なる路面摩擦係数μ1及び該基準路面摩擦係数とは異なる路面摩擦係数μ1の路面でのスリップ角βt1を入力とし、入力されたスリップ角βt1に、基準路面摩擦係数μ0を路面摩擦係数μ1で除した値(μ0/μ1)を掛け算して基準路面でのスリップ角βt0を得て、基準路面摩擦係数の基準路面で得られるタイヤ力とスリップ度との相関関係で成立するタイヤ特性をモデル化したタイヤモデルに従い、掛け算して得た基準路面でのスリップ角βt0に対応する基準路面での横力Fy0を得て、その得た基準路面での横力Fy0に、路面摩擦係数μ1を基準路面摩擦係数μ0で除した値を掛け算して路面摩擦係数μ1の路面での横力Fy1を得る。
(もっと読む)
車両用運動制御装置
【課題】車両の安定性を確保しながら的確に障害物を回避する。
【解決手段】各タイヤの実際のタイヤ力を検出するタイヤ力検出手段(20)と、障害物との衝突を回避するために各タイヤの目標制動力を設定する制動制御目標制動力設定手段(S105)と、目標制動力の下で各タイヤの制動力を制御する制動制御手段(S110)と、各タイヤの制動力を制御した後に、該制動力の制御に続いて左右のタイヤの制動力の差によって車両を旋回させる回頭制御手段(S112-S122)と、車両の旋回方向を決定する障害物回避方向決定手段(S113,S121,S122)と、回頭制御手段(S112-S122)による各タイヤの制動制御の目標制動力を設定する回頭制御目標制動力設定手段(S118,S115)とを有する。
(もっと読む)
車両運動制御装置
【課題】走行エネルギの損失が少ないスムーズで高燃費な走りと最大の車両運動性能を発揮することを走行状態に応じて的確にバランスさせる。
【解決手段】前後制駆動力制御装置30は、目標ステア特性を実現するエネルギ損失最小の前後軸の制駆動力を第1の前後制駆動力Fxfte、Fxrteとして算出し、目標ステア特性を実現しなおかつ前後軸の最大タイヤ横力の和を最大にする前後軸の制駆動力を第2の前後制駆動力Fxftp、Fxrtpとして算出する。そして、横加速度(d2y/dt2)を基に算出した前後軸のタイヤ横力Fyf、Fyrと路面情報(路面μ)に基づいてグリップマージンMgを設定し、グリップマージンMgに応じて第1の前後制駆動力Fxfte、Fxrteと第2の前後制駆動力Fxftp、Fxrtpとを基に前後軸の目標制駆動力Fxft、Fxrtを算出して制駆動力制御装置20に出力する
(もっと読む)
車両の制御装置
【課題】車輪相互間の差回転を適切に制御すると共に、車輪と路面の間のグリップ力を適切に監視してタイヤのグリップ力を最適に維持しながら摩擦円を使い切る効率の良い最適な制御を行う。
【解決手段】ドライバ要求に基づき車輪に発生するタイヤ力と車輪に現在発生しているタイヤ力を基にタイヤ力の摩擦円からのオーバー量をオーバータイヤ力Foverとして演算し、このオーバータイヤ力Foverが+の場合、このオーバータイヤ力Fover分のトルクToverを減じるようにエンジン制御部39に信号出力する。また、オーバータイヤ力Foverと、車体速と各車輪速との差回転を演算し、オーバータイヤ力Foverとこの差回転に基づいてブレーキ駆動部25に信号出力して各輪を制動制御する。
(もっと読む)
車両用減速制御装置及びその方法
【課題】路面μの推定を必要とせず、路面状態に適合して減速制御する。
【解決手段】車両用減速制御装置は、検出した車輪力(横力Fy)及びスリップ度(スリップ角βt)を基に、車輪のグリップ特性を示すグリップ特性パラメータを得るμ勾配算出部25と、グリップ特性パラメータを基に、補正係数Kを得る補正係数K算出部26と、車両の旋回状態を基に目標車速V*を算出するとともに、該目標車速V*を補正係数Kにより補正する目標車速算出部22と、を備える。
(もっと読む)
1 - 20 / 54
[ Back to top ]