
Fターム[3D246HA75]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車輪状態 (1,921) | タイヤ状態 (374) | 前後力 (41)
Fターム[3D246HA75]に分類される特許
1 - 20 / 41
電気自動車
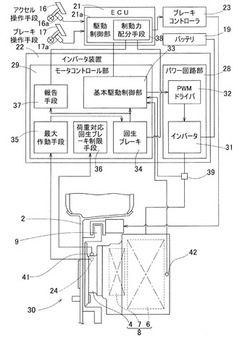
【課題】 可能な限り回生ブレーキを使用し、かつ回生ブレーキの掛け過ぎによるタイヤのスリップを防止できる電気自動車を提供する。
【解決手段】 回生ブレーキ34と、機械式ブレーキ9とを備えた電気自動車において、車輪用軸受4に、路面・タイヤ間に作用する車両進行方向の荷重を検出する荷重センサ41を設けると共に、荷重対応回生ブレーキ制限手段36を設ける。この荷重対応回生ブレーキ制限手段36は、荷重センサ41の出力が設定値に達したときに、回生ブレーキ34の制動トルクを減じる。また、車輪回転数とバッテリの充電状態から回生ブレーキ34の可能最大回生制動トルクを計算し、指令範囲内で回生ブレーキ34の制動トルクを最大に作動させる最大作動手段36を設ける。
(もっと読む)
車両の制動力制御装置

【課題】車両旋回時のタイヤのコーナリングフォースを有効に最大限発揮させ、安定した車両挙動でカーブ外側へのコースアウトを確実に防止する。
【解決手段】車速V、ハンドル角θHに基づいて目標横加速度を算出し、目標横加速度と実際の横加速度とに基づいて車両1に付加すべき第1の付加ヨーモーメントMzt1を算出し、目標横加速度と実際の横加速度とに基づいて第1の付加ヨーモーメントMzt1に加えて車両1に付加すべき第2の付加ヨーモーメントMzt2を算出し、第1の付加ヨーモーメントMzt1に基づいて旋回内側車輪に付加する制動力を第1の制動力FB1として算出し、第2の付加ヨーモーメントMzt2に基づいて旋回内側車輪と旋回外側車輪との間の制動力差を変えることなく車両1に付加する制動力を第2の制動力FB2として算出し、第1の制動力FB1と第2の制動力FB2に基づいて各輪に付加する制動力を算出する。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御よって旋回内輪の前後力が低減されることに起因して運転者が走行阻害感の如き不満を感じる虞れを低減する。
【解決手段】旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御を行う車両の走行制御装置。車輪の駆動力により車両を駆動することの困難性が高いときには該困難性が低いときに比して旋回内輪の前後力の低減が開始され難くし、また旋回内輪の前後力の低減量を小さくする。上記困難性は車輪の駆動力による車輪の移動に対する抵抗及び車輪から路面への駆動力の伝達のし難さの少なくとも一方を含み、例えば車両の実際の加速度と運転者の駆動操作量に基づく車両の規範加速度との偏差に基づいて判定される。
(もっと読む)
車両の制動力制御装置
【課題】車両挙動を適切に保つ際のブレーキ制御量を最小化してドライバが感じる減速度(失速感)を最小とし、且つ、ブレーキ負荷を低減する。
【解決手段】エンジン駆動力を算出し、エンジン駆動力の時間的な変化量(駆動力の変化量)を算出し、車両に作用する走行抵抗を算出し、これら駆動力の変化量と走行抵抗とに基づいて、走行抵抗により発生する減速度を、ドライバが違和感なく許容できる(失速感として感じない)減速度として用いて、走行抵抗以上で、且つ、駆動力の変化量以下の車輪に付加する制動力(付加制動力)を設定して、この付加制動力を基に、目標ブレーキ液圧を算出してブレーキ駆動部15に出力する。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
4輪駆動車のタイヤ力制御装置
【課題】前後駆動力配分制御手段および制動力制御手段を適切に制御することで前後左右全4輪のタイヤ力を最大限活用し、タイヤ限界付近における車両安定性を維持しつつ限界性能を向上させる。
【解決手段】全4輪のうち3輪のタイヤ力が各輪の摩擦円限界値を超えた(飽和した)場合であっても残り1輪でもって3輪トータルのオーバータイヤ力を吸収できる場合は、前後駆動力配分制御部31でもって、左右輪とも飽和している前輪2輪もしくは後輪2輪のオーバータイヤ力の総和だけ飽和していない1輪を有する後輪2輪もしくは前輪2輪に駆動力を移動する。その後、ブレーキ制御部32でもって、各輪のタイヤ力が摩擦円限界値を超えないよう制動力制御する。
(もっと読む)
車両横滑り運動状態量推定装置
【課題】摩擦係数や車両の運動状態が変化する過渡期を含めて車両の横滑り運動の状態量の推定精度を高めることができる車両横滑り運動状態量推定装置を提供する。
【解決手段】車輪2−iと路面との間の摩擦特性モデルを含む車両モデルを用い、各車輪2−iの路面反力モデル値Fsubx_i_estm,Fsuby_i_estmを求めると共に横滑り運動状態量モデル値Vgy_predictを求める手段と、路面反力モデル値の合力によって車両の所定の位置(重心点の位置)に発生する横加速度モデル値Accy_estmと実横加速度検出手段15,22fの出力が示す横加速度検出値Accy_sensとの偏差Accy_errを求める手段と、偏差Accy_errをハイカット特性のフィルタ24d1に通した値を横滑り運動状態量モデル値に加えてなる値を横滑り運動状態量の推定値Vgy_estmとして決定する手段とを備える。
(もっと読む)
摩擦円推定装置
【課題】 摩擦円の推定精度を高くすることができる摩擦円推定装置を提供すること。
【解決手段】 タイヤから車体に伝達する振動伝達特性が減衰特性となる周波数を有する同定トルクを車輪に付与するようにした。
(もっと読む)
路面摩擦係数推定装置
【課題】車両の所定のヨー軸周りのモーメントの推定値を用いて路面の摩擦係数の推定を行う場合に、路面の摩擦係数の推定値の信頼性や安定性をさらに向上させる。
【解決手段】車両1のヨー軸周りの外力モーメントの第1推定値Mz_estm_kを求める手段(S102〜S116,S118−4)と、第2推定値Mz_sens_kを求める手段(S118−3)と、偏差(Mz_sens_k−Mz_estm_k)を“0”に収束させるように路面摩擦係数の推定値の増減操作量Δμ_kを決定する手段(S118−6)とから成る基本処理手段31_kを複数備え、Δμ_kに応じて路面摩擦係数の推定値を更新する。基本処理手段31_kのそれぞれに対応するヨー軸は互いに異なる位置に設定される。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】路面摩擦係数に対して高い精度で推定対象の値を得る。
【解決手段】車両接地面摩擦状態推定装置は、基準路面摩擦係数とは異なる路面摩擦係数μ1及び該基準路面摩擦係数とは異なる路面摩擦係数μ1の路面でのスリップ角βt1を入力とし、入力されたスリップ角βt1に、基準路面摩擦係数μ0を路面摩擦係数μ1で除した値(μ0/μ1)を掛け算して基準路面でのスリップ角βt0を得て、基準路面摩擦係数の基準路面で得られるタイヤ力とスリップ度との相関関係で成立するタイヤ特性をモデル化したタイヤモデルに従い、掛け算して得た基準路面でのスリップ角βt0に対応する基準路面での横力Fy0を得て、その得た基準路面での横力Fy0に、路面摩擦係数μ1を基準路面摩擦係数μ0で除した値を掛け算して路面摩擦係数μ1の路面での横力Fy1を得る。
(もっと読む)
路面摩擦係数推定装置
【課題】車両が走行している路面の摩擦係数の推定値が不安定な変動を生じたり、該推定値の精度が低下するのを防止しつつ、該摩擦係数の推定を行う。
【解決手段】路面反力の合力によって車両1に作用する比較対象外力の第1推定値Mnsp_estmを求める手段(S102〜S116,S122−2)と、比較対象外力に対応する慣性力を規定する車両1の運動状態量γdot,Accyの観測値から比較対象外力の第2推定値Mnsp_sensを求める手段(S122−1)と、摩擦係数μの変化に対する比較対象外力の感度pを算出するμ感度算出手段(S122−4)を備え、偏差(Mnsp_sens−Mnsp_estm)とμ感度pとに応じて路面摩擦係数の推定値μ_estmを更新する。
(もっと読む)
車両用運動制御装置
【課題】車両の安定性を確保しながら的確に障害物を回避する。
【解決手段】各タイヤの実際のタイヤ力を検出するタイヤ力検出手段(20)と、障害物との衝突を回避するために各タイヤの目標制動力を設定する制動制御目標制動力設定手段(S105)と、目標制動力の下で各タイヤの制動力を制御する制動制御手段(S110)と、各タイヤの制動力を制御した後に、該制動力の制御に続いて左右のタイヤの制動力の差によって車両を旋回させる回頭制御手段(S112-S122)と、車両の旋回方向を決定する障害物回避方向決定手段(S113,S121,S122)と、回頭制御手段(S112-S122)による各タイヤの制動制御の目標制動力を設定する回頭制御目標制動力設定手段(S118,S115)とを有する。
(もっと読む)
車両運動制御装置
【課題】走行エネルギの損失が少ないスムーズで高燃費な走りと最大の車両運動性能を発揮することを走行状態に応じて的確にバランスさせる。
【解決手段】前後制駆動力制御装置30は、目標ステア特性を実現するエネルギ損失最小の前後軸の制駆動力を第1の前後制駆動力Fxfte、Fxrteとして算出し、目標ステア特性を実現しなおかつ前後軸の最大タイヤ横力の和を最大にする前後軸の制駆動力を第2の前後制駆動力Fxftp、Fxrtpとして算出する。そして、横加速度(d2y/dt2)を基に算出した前後軸のタイヤ横力Fyf、Fyrと路面情報(路面μ)に基づいてグリップマージンMgを設定し、グリップマージンMgに応じて第1の前後制駆動力Fxfte、Fxrteと第2の前後制駆動力Fxftp、Fxrtpとを基に前後軸の目標制駆動力Fxft、Fxrtを算出して制駆動力制御装置20に出力する
(もっと読む)
車両の制御装置
【課題】車輪相互間の差回転を適切に制御すると共に、車輪と路面の間のグリップ力を適切に監視してタイヤのグリップ力を最適に維持しながら摩擦円を使い切る効率の良い最適な制御を行う。
【解決手段】ドライバ要求に基づき車輪に発生するタイヤ力と車輪に現在発生しているタイヤ力を基にタイヤ力の摩擦円からのオーバー量をオーバータイヤ力Foverとして演算し、このオーバータイヤ力Foverが+の場合、このオーバータイヤ力Fover分のトルクToverを減じるようにエンジン制御部39に信号出力する。また、オーバータイヤ力Foverと、車体速と各車輪速との差回転を演算し、オーバータイヤ力Foverとこの差回転に基づいてブレーキ駆動部25に信号出力して各輪を制動制御する。
(もっと読む)
路面摩擦係数推定装置
【課題】差動制限機構付きの差動装置を備えた車両において、左右夫々の駆動輪がスリップしていると否とに拘わらず路面摩擦係数を推定すること。
【解決手段】差動制限機構付き差動装置20を備えた車両の路面摩擦係数推定装置(電子制御装置)であって、差動制限機構付き差動装置20への入力トルクを推定する差動装置入力トルク推定手段と、差動制限機構付き差動装置20への入力トルク及び同一車軸上の左右夫々の駆動輪(後輪WRL,WRR)の角速度に応じた当該各駆動輪への入力トルクを推定する駆動輪入力トルク推定手段と、駆動輪への入力トルク及び当該駆動輪の慣性トルクに基づいて当該駆動輪の車輪駆動力を推定する車輪駆動力推定手段と、駆動輪の車輪駆動力及び当該駆動輪の車輪接地荷重に基づいて当該駆動輪が接地している路面の路面摩擦係数を推定する路面摩擦係数推定手段と、を備えること。
(もっと読む)
車両運動制御装置及び車両照明灯制御装置
【課題】ドライバの思い描く目標ラインに車両を追従させ、より安定で操作性のよい車両運動制御装置を提供する。
【解決手段】車速Vcを検出する車速検出手段9と、車両の操舵角θstを検出する操舵角検出手段7と、走行時においてドライバが前方注視点Pfより所定偏差Dだけ離れた目標到達地点Poを目指す意思に応じて入力される操舵角θstと所定偏差Dとが相関関係にあると見做すことでドライバモデルを設定し、これを前提として得られるドライバ逆モデルにより操舵角θstと車速Vcよりドライバが目指す目標到達地点Poを演算する目標到達地点設定手段A1と、目標到達地点に到達するように車両の舵角、駆動力及び制動力の少なくとも1つのタイヤ力を車両に搭載されたタイヤ力操作手段A7を介して制御する4輪制駆動力、実舵角演算手段A6とを備えた。
(もっと読む)
車両挙動制御装置
【課題】 複数のデバイスの協調制御に要する処理時間の短縮やデバイスの失陥時における対応の容易化等を実現した車両挙動制御装置を提供する。
【解決手段】 車輪運動制御装置40は、ステップS7で、着力点ηが前軸位置(前輪3fの位置)Lfより大きいか否かを判定する。この判定がYesであった場合、車輪運動制御装置40は、ステップS8で、着力点ηを前軸位置Lfとする(η=Lf)とともに、制動モーメントMbを算出する(Mb=(η−Lf)・F)。車輪運動制御装置40は、ステップS12で、仮想横力Fの操舵制御分を2輪モデルの前後輪3f,3rに分配すべく、前輪横力合計値Ffyと後輪横力合計値Fryとを算出する。車輪運動制御装置40は、ステップS14で、制動モーメントMbを左右輪3l,3rに分配すべく、左輪前後力合計値Flxと右輪前後力合計値Frxとを算出する。
(もっと読む)
車両の操舵制御装置
【課題】カウンタステア操作が必要な場合にカウンタステア操作を誘導又は補助するための安定化力を操舵操作部材に対して付与する場合において、熟練運転者が覚える「カウンタステア操作中の操舵力が予想に反して軽減されるという違和感」を抑制すること。
【解決手段】車両ヨーイング運動に相当するヨーイング値Ygc(オーバステア状態量Jros、前後力差hFx)と、カウンタステアの程度を表すカウンタステア値Cstr(カウンタステア達成値Cts、カウンタステア不足値Cfs)とに基づいて、カウンタステア操作を誘導又は補助する安定化トルクTstbが演算される。このTstbがステアリングホイールに対してカウンタステア方向に付与される。Tstbは、Ctsが小(Cfsが大)の場合(適切なカウンタステア操作がなされない場合)に大きく、Ctsが大(Cfsが小)の場合(適切なカウンタステア操作がなされた場合)に小さく設定される。
(もっと読む)
1 - 20 / 41
[ Back to top ]