
Fターム[3D246HB03]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 路面状態 (664) | 摩擦係数 (303) | グリップ度、路面μ利用率、摩擦円 (22)
Fターム[3D246HB03]に分類される特許
1 - 20 / 22
車両の制御方法及び制御装置
【課題】回生制動装置10と油圧式制動装置30とを備えた車両において、回生制動が付与されている車輪21にスリップが発生したときに、G抜け感の発生を抑制しつつ、上記車輪21のスリップを出来る限り早期に解消する。
【解決手段】回生制動が付与されている少なくとも1つの車輪21のスリップ率が第1所定値以上になったときに、回生制動が付与されている全車輪21に対する回生制動装置10による回生制動力を第1速度で減少させかつ油圧式制動装置30による油圧制動力を増加させ、該油圧制動力の増加後に、スリップ率が上記第1所定値以上になった車輪21に対して、油圧式制動装置30によるアンチロックブレーキ動作を実行させ、回生制動装置30による回生制動力を第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更する。
(もっと読む)
車両の統合制御装置

【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
車両用制動装置
【課題】回生制動による制動力を状況に応じて変えるとともに、車両の運動エネルギを好適に電気エネルギに変換できる車両用制動装置を提供することを課題とする。
【解決手段】走行用モータ3の減速比を変更可能な変速機4aを有するハイブリッド車両HVに備わり、ブレーキペダルの操作量に応じて設定される目標制動力に基づいてブレーキアシスト制御する車両用制動装置1とする。そして、走行用モータ3を回生制御して回生制動力を発生する回生ブレーキと、油圧で作動するブレーキ作動部Brで摩擦制動力を発生する油圧ブレーキと、を備え、ブレーキアシスト制御の開始条件が成立したとき、車両用制動装置1は、回生制動力が低下するように減速比を設定した後で減速比の変更を停止し、回生制動力と摩擦制動力で目標制動力を発生することを特徴とする。
(もっと読む)
車両の制動力制御装置
【課題】車輪ロックやABSによる減圧に伴う付加ヨーモーメントの減少を極力抑え、付加制動力を最小化して走行ロスを低減する。
【解決手段】旋回内輪に付加する総制動力FB、旋回内輪の総駆動力FDを算出し、旋回内輪に付加する総制動力FBに対する旋回内側前輪に付加する制動力の割合を制動力の前後配分比DBとして、タイヤのグリップ状態が限界に近づくに従って、制動力の前後配分比DBを静止時の接地荷重配分比に近い値から減少させて設定して、これら旋回内輪に付加する総制動力FBと旋回内輪の総駆動力FDと制動力の前後配分比DBとに応じて旋回内輪の前輪と後輪のそれぞれに付加する制動力FBf、FBrを算出する。
(もっと読む)
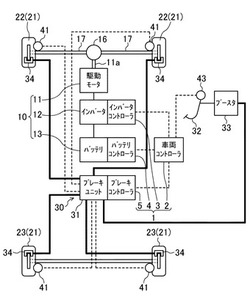
電気自動車および制動プログラム
【課題】車輪のロックを検出して制動力の制御を行う場合に比較して、制動距離を短くすることができる電気自動車および制動プログラムを提供する。
【解決手段】
前輪側の左右輪2fr,2flと後輪側の左右輪2rr,2rlとを独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、運転者のブレーキ操作量に応じて摩擦ブレーキ機構による制動力および電気モータ3による制動力を共に発揮させ、各車輪2の少なくとも何れかのスリップ率が路面の摩擦係数に応じて設定された第1の所定値を超えたとき、ブレーキ操作量に関わらず電気モータ3による制動力を低減し、その後スリップ率が前記第1の所定値よりも低い第2の所定値以下となったとき、電気モータ3による制動力を増加する制御を行う制御装置10とを備える。
(もっと読む)
車両制御装置
【課題】より精度よく、車両の走行制御を行うことのできる車両制御装置を提供すること。
【解決手段】車両1の走行を実現する複数のアクチュエータを、車両1の周辺の状況を検出する走行状況検出手段で検出した情報に応じて制御することにより車両1の走行制御を車両1の周辺の状況に応じて行うことが可能な車両制御装置2において、走行状況検出手段としてカメラ60、レーダー61、カーナビゲーションシステム65等の複数設けられており、これらの複数の走行状況検出手段で検出した複数の情報の信頼度に応じて、エンジン12や自動変速機15、EPS装置35、VGRS38、ブレーキ油圧制御装置50等の複数のアクチュエータのうち、一部のアクチュエータの制御量を制限する。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
車両制御装置
【課題】走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行うことが可能な車両制御装置を提供することを目的とする。
【解決手段】運転計画生成ECU18は、自車または他車両の走行実績のある前後Gxおよび横Gyに基づいて、路面μの上限および下限を設定し、路面μの上限以下の範囲で、または、下限以上の範囲で路面μを算出することにより、走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行う。
(もっと読む)
車両制御装置
【課題】 車両挙動変化に対するショックアブソーバの減衰力特性の制御の遅れを抑制することができる車両制御装置を提供すること。
【解決手段】 ホイルシリンダ液圧が高くなるほど減衰力特性をハードに設定するようにした。
(もっと読む)
4輪駆動車のタイヤ力制御装置
【課題】前後駆動力配分制御手段および制動力制御手段を適切に制御することで前後左右全4輪のタイヤ力を最大限活用し、タイヤ限界付近における車両安定性を維持しつつ限界性能を向上させる。
【解決手段】全4輪のうち3輪のタイヤ力が各輪の摩擦円限界値を超えた(飽和した)場合であっても残り1輪でもって3輪トータルのオーバータイヤ力を吸収できる場合は、前後駆動力配分制御部31でもって、左右輪とも飽和している前輪2輪もしくは後輪2輪のオーバータイヤ力の総和だけ飽和していない1輪を有する後輪2輪もしくは前輪2輪に駆動力を移動する。その後、ブレーキ制御部32でもって、各輪のタイヤ力が摩擦円限界値を超えないよう制動力制御する。
(もっと読む)
摩擦円推定装置
【課題】 摩擦円の推定精度を高くすることができる摩擦円推定装置を提供すること。
【解決手段】 タイヤから車体に伝達する振動伝達特性が減衰特性となる周波数を有する同定トルクを車輪に付与するようにした。
(もっと読む)
選択的非線形最適化演算による車輌運転制御方法
【課題】電子制御装置のコンピュータに高負荷をかける非線形最適化演算制御等の評価関数制御を、電子制御装置によるその他の車輌運転制御を損なうことなく、且つ電子制御装置のコンピュータのグレードアップに頼ることなく実現する。
【解決手段】車輌の走行性能に関与する複数のパラメータについて評価関数の演算により得られた値にて時系列的に行う制御を、前記複数のパラメータの少なくとも一つがそれについて設定された閾値の一方の側にあるときのみ行う。
(もっと読む)
車両運動制御装置
【課題】走行エネルギの損失が少ないスムーズで高燃費な走りと最大の車両運動性能を発揮することを走行状態に応じて的確にバランスさせる。
【解決手段】前後制駆動力制御装置30は、目標ステア特性を実現するエネルギ損失最小の前後軸の制駆動力を第1の前後制駆動力Fxfte、Fxrteとして算出し、目標ステア特性を実現しなおかつ前後軸の最大タイヤ横力の和を最大にする前後軸の制駆動力を第2の前後制駆動力Fxftp、Fxrtpとして算出する。そして、横加速度(d2y/dt2)を基に算出した前後軸のタイヤ横力Fyf、Fyrと路面情報(路面μ)に基づいてグリップマージンMgを設定し、グリップマージンMgに応じて第1の前後制駆動力Fxfte、Fxrteと第2の前後制駆動力Fxftp、Fxrtpとを基に前後軸の目標制駆動力Fxft、Fxrtを算出して制駆動力制御装置20に出力する
(もっと読む)
車両用減速制御装置及びその方法
【課題】路面μの推定を必要とせず、路面状態に適合して減速制御する。
【解決手段】車両用減速制御装置は、検出した車輪力(横力Fy)及びスリップ度(スリップ角βt)を基に、車輪のグリップ特性を示すグリップ特性パラメータを得るμ勾配算出部25と、グリップ特性パラメータを基に、補正係数Kを得る補正係数K算出部26と、車両の旋回状態を基に目標車速V*を算出するとともに、該目標車速V*を補正係数Kにより補正する目標車速算出部22と、を備える。
(もっと読む)
車両挙動制御装置
【課題】より適切に車両の挙動を制御することのできる車両挙動制御装置を提供すること。
【解決手段】モーメント制御量を導出する際に、車輪はグリップオフの状態であると判定した場合のみでなく、グリップ限界であるとセルフアライニングトルクに基づいてグリップ限界判定部66によって判定した場合には、モーメント制御量導出部63でモーメント制御量を導出する際に用いる走行状態量の種類を増加させて導出する。これにより、車輪がグリップ限界であると判定される場合も、ヨーレート偏差を小さくする挙動制御が可能になる。また、セルフアライニングトルクは、車輪のグリップが限界であるか否かの判定をする際に用いているので、セルフアライニングトルクにノイズが含まれている場合でもモーメント制御量の導出には影響を与えず、より適切なモーメント制御量を導出することができる。これらの結果、より適切に車両の挙動を制御することができる。
(もっと読む)
車両用の能動的安全システムを調整する方法、前記方法で得られた装置および前記方法で得られた装置を備える車両
本発明は、自動車の能動的安全システム、とりわけアンチロック制動システム(ABS)、アンチスキッドシステム(ARSまたはTSC)、経路制御機器(ESP)、総合的自動車シャーシ制御システム(VDM)もしくは類似物、および前記方法によって得られる能動的安全システムおよび/またはそのような能動的安全システムを装備された自動車を調整する方法に関する。本発明の主題は、有利には、ポリ四フッ化エチレン(PTFE)の種類またはPTFEと他の材料との混合物または合金であることが好ましい、低摩擦係数の樹脂材料で作られた、低タイヤグリップを有する被覆物(1)を装備された、少なくとも1つの車輪を備える車両を使用する能動的安全システムを調整する方法である。本発明は、とりわけ自動車産業に適用される。本発明は、主に、能動的安全システム産業に適用される。  (もっと読む)
(もっと読む)
車両運動制御システム
【課題】駆動力配分制御と制動力配分制御との併用により車両運動制御を効率的に行い得る車両運動制御システムを提供すること。
【解決手段】車両運動制御システム1では、車両運動制御にあたり、車両10の運動に関する状態量と、車両の運動に関する各車輪11FR〜11RLの制御量と、車両の運動を安定化させるための目標状態量と、目標状態量を実現するための目標制御量と、目標制御量を実現するための各車輪の制駆動力の目標制駆動力とが算出される。また、目標制駆動力に基づいて駆動力配分制御装置2による駆動輪11RR、11RLの駆動力制御と、制動力制御装置3による各車輪11FR〜11RLの制動力制御とが行われる。状態量が車両10の前輪横力および後輪横力を含む。このとき、駆動輪11RR、11RLに作用する横力が他の車輪11FR、11FLに作用する横力よりも小さくなるよう、制動力制御装置3が各車輪の制動力を制御する。
(もっと読む)
衝突回避制御装置
【課題】
前方障害物との衝突回避のために、減速による回避では不十分な場合には旋回による回避を行って確実な障害物の回避を実現するとともに、その回避制御のための計算負荷を低減することで、安全性を損なうことなく簡易な方法で回避制御することのできる衝突回避制御装置を提供する。
【解決手段】
自車前方の障害物までの距離と幅、及び自車速度に基づいて障害物を回避可能な距離を算出して回避すべきか否かを判断し、障害物を回避すると判断した場合に、距離と幅及び自車速度に基づいて車両の横移動量が回避幅を満足するために必要な横加速度を算出する横加速度指令算出手段102と、横加速度指令算出手段で算出された横加速度指令から車両の操舵角度を予測的に算出する操舵角度算出手段104とを備える。
(もっと読む)
車両のタックイン防止制御装置
【課題】たとえトラクション制御によりスロットル弁が閉側に制御されることがあっても、タックイン現象を的確に防止して違和感を与えることなく自然な制御を行う。
【解決手段】駆動力配分制御部40では、第1のトランスファトルク演算部43で入力トルク感応トランスファトルクを演算し、第2のトランスファトルク演算部44で舵角/ヨーレート感応トランスファトルクを演算し、第3のトランスファトルク演算部45でタックイン防止トランスファトルクを演算する。この第3のトランスファトルク演算部45では、高速旋回時、アクセル開度が大きく閉じられて今回のアクセル開度が小さくなった場合のみならず、トラクション制御部20によるトルクダウン量が設定値より大きい場合においてもタックイン防止制御を実行する。また、横すべり防止制御部30とABS31の少なくとも一方が作動している場合には、タックイン防止制御を禁止する。
(もっと読む)
車両の旋回挙動制御方法および装置
【課題】旋回挙動制御用左右輪間制駆動力差に起因した左右駆動輪の同方向転動変位によるヨーモーメントの影響を排除して目標ヨーモーメントを正確に達成可能にする。
【解決手段】旋回挙動制御用の左右輪間制駆動力差(制駆動力モーメント)により車両に直接付与されるヨーモーメント、および、左右輪間制駆動力差(制駆動力モーメント)に起因した左右輪の転動変位によるヨーモーメントとの合計ヨーモーメントと、左右輪間制駆動力差(制駆動力モーメント)との関係を求めておき、これを用いて横軸上の合計ヨーモーメントに目標ヨーモーメントMzを当てはめることにより、目標ヨーモーメントMzを実現するのに必要な目標制駆動力モーメント(左右輪間目標制駆動力差)を求め、これを基に左右輪の制駆動力指令値をそれぞれ求めて旋回挙動制御に資する。
(もっと読む)
1 - 20 / 22
[ Back to top ]