
Fターム[3D246HC06]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | 時間領域での推定 (86) | 前回値を使うもの (27)
Fターム[3D246HC06]に分類される特許
1 - 20 / 27
前後加速度推定装置
【課題】車両の前後加速度又は路面摩擦係数若しくは路面状態の推定精度を向上させることが可能な前後加速度推定装置を提供する。
【解決手段】前後加速度推定装置22は、加速操作又は減速操作の開始時点における前後加速度センサ42の検出値と、その後の前後加速度センサ42の検出値との差を、車両10の前後加速度の推定値として算出する加速度推定手段110を有する。
(もっと読む)
車両状態検出装置

【課題】車両に設置されたカメラ20で撮像された画像データに基づいて、自車両の状態を検出する車両状態検出装置であって、その検出精度を向上させることを目的とする。
【解決手段】制御装置10(CPU11)は、カメラ20で撮像された複数の画像データを取得して、この複数の画像データの夫々において特徴点を抽出し、時間的に連続する画像データにおいて、特徴点の位置を追跡処理することによって複数のオプティカルフローを導出する(S10〜S30)。そして、導出された複数のオプティカルフローにおいて、方向と大きさの両方が同じであるオプティカルフロー同士を一つのグループに分類するとともに、オプティカルフローが最も多く含まれるグループのオプティカルフローを、自車両に対応する自車オプティカルフローとして選択し、選択された自車オプティカルフローに基づいて自車両の状態を検出する(S50〜S70)。
(もっと読む)
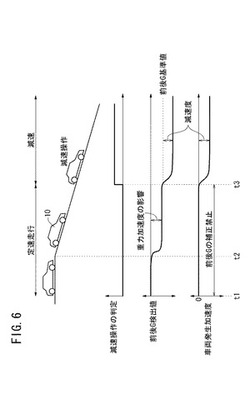
車両用ブレーキ制御装置
【課題】EPBによる制動力によって車両のずり下がりを防止しつつ、過剰な制動力を発生させなくても済むようにする。
【解決手段】車速が0になって車両が停止したときに、ピッチングによりGセンサ21のGセンサ値が変動しても、その変動波形の振幅のーク値に沿って目標制動力が更新されるようにしている。これにより、Gセンサ値に基づいて設定される目標制動力をより路面勾配に対応する値に近づけることが可能となる。このため、EPBによる制動力によって車両のずり下がりを防止しつつ、過剰な制動力を発生させなくても済むようにできる。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ペダルフィーリングの悪化を抑えつつ、入口弁(常開型比例電磁弁)のハンチングを抑えることを目的とする。
【解決手段】制御部は、常開型比例電磁弁の通電量を第1勾配で減少させる際に、通電量を増加側にオフセットするオフセット制御を実行するオフセット手段を有し、オフセット手段は、電流検出手段で検出された電流値が所定の変動状態となるか否かを判定し(ステップS5)、所定の変動状態となる場合に(Yes)、オフセット制御を実行する(ステップS6)。
(もっと読む)
アンチスキッド制御装置
【課題】積載重量の変化に対応したより最適なABS制御を行えるようにする。
【解決手段】前高μ輪に対して実行される制御中ヨーコン制御において、推定積載重量に応じて圧力閾値Pholdを可変とし、推定積載重量に応じて設定される圧力閾値Pholdに基づいて保持制御と緩増圧制御の選択が行われるようにする。このようにすれば、より細かく推定積載重量に応じた最適なABS制御を行うことが可能となる。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作に基づき車両のエンジンを自動的に停止させる機能を有する車両において、制動制御を阻害することなくエンジンを速やかに再始動させることができる車両の制御装置及び車両の制御方法を提供する。
【解決手段】ブレーキ用ECUは、車輪に制動力が付与されない状態で走行する場合における車両の加速度の推定値として惰性加速度Dgを取得し(ステップS27)、該惰性加速度Dgに基づき第1車速推定値VS1を取得し(ステップS28)、取得した第1車速推定値VS1が制動制御許可基準値KVS未満である場合に(ステップS29:YES)、エンジンの再始動を許可する(ステップS30)。
(もっと読む)
車線逸脱防止装置
【課題】ブレーキ冷間時のブレーキ制動力低下の影響を抑制して、車線逸脱防止制御として所望のヨーモーメントを自車両に付与する。
【解決手段】車線逸脱防止装置は、エンジンの始動状態(ステップS31、ステップS32)、ブレーキの作動状態(ステップS34)、ワイパーの作動状態(ステップS37)、外気温及び自車速の状態(ステップS39)に基づいて、制動力発生手段の温度を評価するブレーキエネルギ評価指標値Ecbrを算出し(ステップS41)、そのブレーキエネルギ評価指標値Ecbrに基づいて、車線逸脱防止制御の制御量としての目標ヨーモーメントを補正する(ステップS41、ステップS42)。
(もっと読む)
車両の制御方法及び車両の制御装置
【課題】車両の停止時に該車両からの作動音の発生を抑制できる車両の制御方法及び車両の制御装置を提供する。
【解決手段】運転手によるブレーキペダルの操作によって車両が停止する場合、ブレーキ用ECUは、車両が停止する前に、自動変速機の入力クラッチを作動させてエンジンから後輪への動力伝達効率を低減させる(第4のタイミングt24)。その後、運転手によるブレーキペダルの操作によって車両が停止した場合、ブレーキ用ECUは、各リニア電磁弁に対する電流値Islを調整して車両に対する制動力を保持させる(第5のタイミングt25)。
(もっと読む)
車両用ブレーキ制御装置
【課題】 車両が加減速の頻度が高くなる走行状態であるときに、減速後における揺り戻し挙動を抑制する車両用ブレーキ制御装置を提供すること。
【解決手段】 電子制御ユニット34は、スポーツモードスイッチ33がスポーツモードに切り替えられており、前後加速度センサ31によって検出された減速度Gが予め設定された所定減速度Go以上であるとき、ブレーキ液圧制御部20の作動を制御する。具体的に、ユニット34は、マスタシリンダ液圧センサ32によって検出されたマスタシリンダ液圧Pmの液圧変化量ΔPmが所定の短い時間間隔で負の値であるときに、ブレーキユニット11〜14におけるブレーキ液圧が予め設定された減圧量ΔPにより減圧するように目標ブレーキ液圧Ptを設定する。そして、ユニット34は、駆動回路35を介して、ブレーキ液圧制御部20の作動を制御し、ブレーキユニット11〜14におけるブレーキ液圧を緩やかに減圧させる。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】路面摩擦係数に応じた適切な減圧量で減圧制御を行い、ブレーキフィーリングを向上させる。
【解決手段】車両用ブレーキ液圧制御装置は、常開型電磁弁および常閉型電磁弁を制御することで、車輪ブレーキ内の液圧を増減する制御を行う制御手段(制御部20)を備える。制御手段は、車輪速度が減少中で減圧制御することを決定した場合において、基本減圧制御(基本減圧制御部251)と漸減圧制御(漸減圧制御部252)とを続けて行う減圧サイクルで減圧を行い、基本減圧制御においては、基本減圧量で減圧制御を行い、漸減圧制御においては、所定時間、液圧を保持する一時保持制御(一時保持制御部252A)と、当該一時保持制御の後、車輪速度が減少傾向にある場合には、基本減圧量より小さい量の減圧を実行する微小減圧制御(微小減圧制御部252B)とを行う。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】減圧量の変動があっても、ブレーキフィーリングが大きく変化しないようにする。
【解決手段】車両用ブレーキ液圧制御装置は、液圧源側から車輪ブレーキへの液圧路に配置され、通電量によって閉弁力が調整可能な常開型比例電磁弁と、車輪ブレーキから液圧源への液圧路に配置された常閉型電磁弁と、常開型比例電磁弁および常閉型電磁弁への通電量を制御することで、車輪ブレーキ内の液圧を増圧状態、保持状態または減圧状態に切り替える制御を行う制御手段と、を備える。制御手段は、減圧状態または保持状態から増圧状態へと移行する場合に、折れ点目標液圧まで第1の勾配PG1で増圧させるとともに、折れ点目標液圧から増圧終了まで第1の勾配PG1より緩い第2の勾配PG2で増圧させるように制御し、折れ点目標液圧PBを、減圧開始圧PRから所定のオフセット圧PSを減算することで決定する。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
車両横滑り運動状態量推定装置
【課題】摩擦係数や車両の運動状態が変化する過渡期を含めて車両の横滑り運動の状態量の推定精度を高めることができる車両横滑り運動状態量推定装置を提供する。
【解決手段】車輪2−iと路面との間の摩擦特性モデルを含む車両モデルを用い、各車輪2−iの路面反力モデル値Fsubx_i_estm,Fsuby_i_estmを求めると共に横滑り運動状態量モデル値Vgy_predictを求める手段と、路面反力モデル値の合力によって車両の所定の位置(重心点の位置)に発生する横加速度モデル値Accy_estmと実横加速度検出手段15,22fの出力が示す横加速度検出値Accy_sensとの偏差Accy_errを求める手段と、偏差Accy_errをハイカット特性のフィルタ24d1に通した値を横滑り運動状態量モデル値に加えてなる値を横滑り運動状態量の推定値Vgy_estmとして決定する手段とを備える。
(もっと読む)
路面摩擦係数推定装置
【課題】車両の所定のヨー軸周りのモーメントの推定値を用いて路面の摩擦係数の推定を行う場合に、路面の摩擦係数の推定値の信頼性や安定性をさらに向上させる。
【解決手段】車両1のヨー軸周りの外力モーメントの第1推定値Mz_estm_kを求める手段(S102〜S116,S118−4)と、第2推定値Mz_sens_kを求める手段(S118−3)と、偏差(Mz_sens_k−Mz_estm_k)を“0”に収束させるように路面摩擦係数の推定値の増減操作量Δμ_kを決定する手段(S118−6)とから成る基本処理手段31_kを複数備え、Δμ_kに応じて路面摩擦係数の推定値を更新する。基本処理手段31_kのそれぞれに対応するヨー軸は互いに異なる位置に設定される。
(もっと読む)
ABS制御システム異常診断装置
【課題】本発明は、ABS制御システム異常診断装置に関し、ABS制御システムの異常を高精度に判定することが可能なABS制御システム異常診断装置を提供することを目的とする。
【解決手段】システム同定部10は、ABS制御時における制御入力(クランク軸の軸トルク)から制御出力(車輪の回転速度)までの車両挙動の動特性を記述する同定式を、ブレーキ圧の上昇状態、下降状態及び保持状態という合計3離散状態で切り替わるPWARXモデルとして同定を行う。現在状態推定部12及び車輪速推定部14は、同定したPWARXモデルを用いて現在状態及び車輪速を推定する。距離演算部16、帰属確率演算部18は、PWARXモデルのサブモデルを用いて距離、帰属確率をそれぞれ演算する。異常判定部20は、これらの推定値や演算値に基づいて、ABS制御システムの異常判定を行う。
(もっと読む)
ブレーキ制御装置
【課題】運転者のブレーキフィーリングを良好に維持しつつ、制動制御の応答性を高めることができるブレーキ制御技術を提供する。
【解決手段】ある態様のブレーキ制御装置において、ブレーキECUは、ブレーキペダルの踏み込みがなされた状態からさらに所定量踏み込まれる踏み増しが行われたか否かを予め定める判定基準に基づいて判定し、その踏み増し判定がなされたときには、目標制動力に応じて演算された目標液圧に対してその目標値を上乗せする所定の嵩上げ処理を実行する。
(もっと読む)
制動力制御装置および制動力制御方法
【課題】 運転者の要求減速度が高い場合の制動力過多を抑制できる制動力制御装置および制動力制御方法を提供する。
【解決手段】 運転者の要求減速度を検出するベース圧演算部32aと、制動力を発生するHU31およびホイルシリンダW/Cと、時間の経過に応じて大きな第1ゲインUP_GAIN1および第2ゲインUP_GAIN2を算出し、要求減速度と第1ゲインUP_GAIN1および第2ゲインUP_GAIN2とに基づいて目標減速度を算出する目標圧演算部32cと、目標減速度に基づいてHU31を制御するブレーキコントローラ32と、を有する制動力制御装置において、目標圧演算部32cは、要求減速度が高いほど、第2ゲインUP_GAIN2を小さくする。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】車線区分線の認識度が低くても、運転者の運転を支援する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】予め設定した所定時間後の自車両の将来の横位置を予測する。その予測した自車両の将来の横位置が、車線区分線を基準として予め定められた所定の車線幅方向位置よりも自車線中央側からみて外側に位置すると判定すると、自車線中央側に向かうヨーモーメントを車両に付与するように車両制御を開始する。このとき、前記車線区分線を検出できない若しくは認識度が低い場合には、車線区分線を正常に検出しているときと比較して、前記制御を抑制する。
(もっと読む)
車両の走行制御装置
【課題】走行時の走行用回転体温度の過上昇を好適に防止するための車両の走行制御装置を提供することを課題とする。
【解決手段】本発明に係る車両の走行制御装置10は、走行用回転体の回転により走行する車両Cの走行時の走行用回転体温度の過上昇を防止するためのものであって、車両Cの運転状態の変化に基づき、当該運転状態の変化に起因して上昇する走行用回転体温度の収束値である第1の平衡温度T1を導出する平衡温度導出手段12と、導出された第1の平衡温度T1と予め記憶している第1の閾値とを比較し、第1の平衡温度T1が第1の閾値を超えたときに所定の信号を出力する比較手段14とを備えることを特徴とする。
(もっと読む)
車輪速度演算装置
【課題】車輪速度センサから出力されるパルス信号のエッジに基づいて、車輪速度を演算する車輪速度演算装置において、エッジが未検出である場合に、実際の車輪速度の変化を反映させつつ、そのエッジが未検出である間の車輪速度を推定することができる車輪速演算装置を提供すること。
【解決手段】車輪の推定移動距離Dnに基づいて、エッジが未検出である期間における車輪速度を推定する。この車輪の推定移動距離Dnは、エッジが検出された時点の車輪速度におけるトレンドの変化線の傾きAnを考慮して推定されるので、実際の走行に近い状態で距離を推定できる。そして、この推定移動距離Dnを用いて、次のエッジが検出されるタイミングを予測し、そのタイミングを考慮して、エッジが未検出である期間における車輪速度を推定すれば、その推定に、実際の車輪速度の変化を反映させることができる。
(もっと読む)
1 - 20 / 27
[ Back to top ]