
Fターム[3D246JB08]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 不感帯の設定 (23)
Fターム[3D246JB08]に分類される特許
1 - 20 / 23
車両のブレーキ制御装置
【課題】 リニア制御弁が過度に作動する状態を抑制しつつ、ブレーキ操作に対する制御応答性を適切に確保することができるブレーキ制御装置を提供すること。
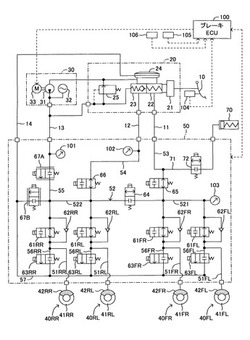
【解決手段】 ブレーキECU100は、ブレーキ操作量に対応する目標液圧P*、増圧機構を構成するアキュムレータ32から供給されるアキュムレータ圧Pacc及び制御圧センサ103によって検出される検出液圧Pxを用い、増圧リニア制御弁67Aについて、目標液圧P*を用いた目標差圧(Pacc−P*)を決定し、この目標差圧(Pacc−P*)と所定に関係にある開弁電流を決定する。又、ECU100は、減圧リニア制御弁67Bについて、目標液圧P*を用いた目標差圧(P*)を決定し、目標差圧(P*)と所定の関係にある開弁電流を決定する。そして、ECU100は、決定したそれぞれの開弁電流を少なくとも脈動発生時に継続して供給する、
(もっと読む)
車両挙動制御装置

【課題】主処理装置が異常になっても、車両の挙動を安定的に制御する。
【解決手段】第1の処理装置10は、車両の利用者からの要求を入力する要求入力センサ2を含む複数のセンサ2、3からの複数の信号を含む第1の情報に基づいて、第1の制御量COM1を演算する。第2の処理装置20は、要求入力センサ2からの信号を含むが、第1の情報より情報量が少ない第2の情報に基づいて、第2の制御量COM2を演算する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH内であると判定されるとき、第1の制御量COM1に基づいて走行機器4を制御する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH外であると判定されるとき、車両の運動量が小さくなる制御量、または車両の運動量の変化が小さい制御量に基づいて走行機器4を制御する。
(もっと読む)
ブレーキ制御装置
【課題】
ドライバの違和感を抑制することができるブレーキ制御装置を提供すること。
【解決手段】
ドライバによるブレーキペダル2の操作に対してマスタシリンダ4の圧力の上昇が抑制される無効ストローク動作中に、マスタシリンダ4内のブレーキ液を用いてホイルシリンダ5の圧力を調整する際、マスタシリンダ4とホイルシリンダ5を接続する第1ブレーキ回路(供給通路11)上に設けられたノーマルオープン型の電磁弁(ゲートアウト弁20)に対し、弁体200が閉弁する所定電流Iinitialを通電する第1通電部71と、第1通電部71による通電後、連続して所定電流Iinitialより低い電流Ibalance(t)を通電する第2通電部72と、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)へ漸近させて移行する移行通電部73とを備えた。
(もっと読む)
ブレーキ制御システム
【課題】回生ブレーキの回生効率をより高める。
【解決手段】車両100の運動エネルギを利用して発電を行う回生ブレーキ101と、車両の運動エネルギを熱エネルギに変換する機械的ブレーキ200と、ブレーキペダル204を踏み込んでから機械的ブレーキ200が作動する前に回生ブレーキ101を作動させ、回生ブレーキ101の発電負荷が大きいほど、ブレーキペダル204を踏み込んでから機械的ブレーキ200が作動するまでの該ブレーキペダル204の踏込量を大きくし且つ回生ブレーキ101の発電電圧を低くする制御手段20と、を備える。
(もっと読む)
車両用運転操作支援装置
【課題】車両を減速させる運転操作支援の制御において違和感が生じることなく運転操作支援を行う。
【解決手段】ナビゲーション装置3からの道路情報に基づいて進路上にカーブが有る場合に、カーブ開始位置の目標地点の目標速度まで減速させるための高低2つの減速ラインを設定し、車速の高低に応じていずれか一方の減速ラインで減速させるために車速が減速ラインを超えていたらナビゲーション装置や画面表示可能な装置で減速の表示を行い、さらにアクセル反力を発生させたり、ブレーキによる制動を行ったりし、かつ目標地点近傍にそれらの制御を解除する不感帯を設ける。目標地点に近付いて複数の減速ライン間が狭まることにより、隣接する減速ラインを交互に制御の基準として異なる種類の制御が行われることによる運転者に与えてしまう違和感を防止し得る。
(もっと読む)
先行車追従走行装置
【課題】燃費の悪化が抑制でき、且つ、先行車に対する追従性も良好な先行車追従走行装置を提供する。
【解決手段】先行車追従制御において、摩擦ブレーキ開始閾値式(L1)、エンジンブレーキ開始閾値式(L2)、加速制御終了閾値式(L3)を用いて、摩擦ブレーキ開始閾値、エンジンブレーキ開始閾値、加速制御終了閾値を逐次算出する。そして、エンジンブレーキ開始閾値と加速制御終了閾値の間を等速領域とし、KdB_cの現在値が等速領域にあれば等速制御を行う。等速制御を行うことができる結果、加減速の頻度が低下するので、燃費の悪化が抑制できる。また、減速の頻度が少なくなることにより、割り込み車が加速した場合や、先行車が減速後、再加速した場合に、先行車に追従するための加速が少なくて済むので、追従性も良好となる。
(もっと読む)
ブレーキ制御装置
【課題】 運転者に違和感を与えることなくブレーキペダル操作量に応じた制動力を得ることが可能なブレーキ制御装置を提供すること。
【解決手段】 本発明では、ブースタの倍力が無効とされる第1のストローク領域を備えた液圧制御装置に、第1のストローク領域ではドライバ要求制動力を実現するようにホイルシリンダ圧の液圧サーボを行い、第2のストローク領域では、ストローク量に対応して設定された目標ホイルシリンダ圧と目標マスタシリンダ圧との関係を維持するようにポンプや制御弁を制御することとした。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供する。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値と下限値の間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値より大きくなることおよび下限値より小さくなることを防止する。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
車両用運転支援装置
【課題】運転者の運転感覚に合致した最適な自動減速制御を行なうことが可能な車両用運転支援装置を提供すること。
【解決手段】車両が特定の位置を走行する際に自動減速制御を行なう制御手段を備える車両用運転支援装置であって、運転者のアクセル操作を検出するアクセル操作検出手段と、前記運転者のブレーキ操作を検出するブレーキ操作検出手段と、を備え、前記制御手段は、前記アクセル操作検出手段及び前記ブレーキ操作検出手段の検出結果を参照して前記運転者が一連の特定操作を行なったと判定した場合に、該一連の特定操作に含まれる操作の行なわれたタイミングを学習し、該学習したタイミングに基づいて、前記自動減速制御の制御区間を決定することを特徴とする、車両用運転支援装置。
(もっと読む)
車両挙動制御装置
【課題】運転者への違和感が小さくできる車両挙動制御装置を得る。
【解決手段】ハンドルの操舵角を検出又は推定する操舵角検出手段と、車両の速度を検出する車速検出手段と、操舵角検出手段の出力である操舵角の0近傍に制御不感帯を有し、操舵角検出手段の出力である操舵角に対して、低車速側では制御不感帯幅を大きく、高車速側では制御不感帯幅を小さく設定し、車速検出手段の出力である車速に応じた制御不感帯幅を出力する制御不感帯幅設定器と、操舵角検出手段の出力である操舵角の絶対値が制御不感帯幅設定器の出力である制御不感帯幅で設定される操舵角の絶対値の上限より大きい場合に車両の減速制御用出力を発生する車両減速制御実施判断器とを備え、車両減速制御実施判断器の前記減速制御用出力により車両の減速制御を実施する
(もっと読む)
障害物認識装置
【課題】本発明は、車体が傾いた場合でも適切に障害物を認識することができる障害物認識装置を提供することを課題とする。
【解決手段】移動体に搭載される障害物認識装置1であって、移動体の周辺の物体を検出する物体検出手段10,31と、移動体の車体の傾斜に応じて物体検出手段10,31で検出可能な走行面の領域を算出する面領域算出手段32とを備え、物体検出手段10,31で検出した物体のうち面領域算出手段32で算出した走行面の領域に存在する物体を障害物として認識しないことを特徴とする。
(もっと読む)
車両制御装置
【課題】車両の停止状態において制動力を車輪に作用させる車両制御装置において、エンジンを自動停止させる機会を更に増やす。
【解決手段】車両制御装置は、車両が走行状態であっても、エンジン10の運転中に所定の停止条件が成立した場合にエンジン10を自動停止させるとともに、所定の再始動条件が成立した場合にエンジン10を再始動させる。車両制御装置は、車速センサ35及びECU30により検出される検出車速が0である場合に、運転者のブレーキ操作に基づいて車輪27に作用させられる制動力よりも大きい所定の制動力を、ブレーキアクチュエータ28により車輪27に作用させる。車両の実速度が0となる付近で検出車速が0となる不感帯が存在している。車両制御装置は、エンジン10の自動停止に伴い検出車速が0まで低下した時に、ブレーキアクチュエータ28により所定の制動力よりも小さい制動力を車輪27に作用させるECU30を備えている。
(もっと読む)
側方障害物回避装置及び側方障害物回避方法
【課題】側方障害物回避の制御による車両挙動の変動を抑制して、運転者への違和感を低減する。
【解決手段】所定時間後の自車両の将来位置に基づき、自車両側方に位置する障害物に対するリスクが高い場合には障害物への接近を防止する方向に自車両を制御する。このとき、運転者による修正操舵が増加する状況と推定する場合には、制御の開始を遅らせたり制御量を小さくしたりして、上記制御を抑制する。
(もっと読む)
車両の制御装置
【課題】車両のドライバビリティを低下させることなく、バウンシングおよびピッチングを適切に抑制することのできる車両の制御装置を提供する。
【解決手段】車体のピッチングもしくはバウンシングの状態に応じて、それらピッチングもしくはバウンシングを抑制するために算出される駆動力配分比に基づいて駆動力発生機構により前後輪に駆動力もしくは制動力を発生させる車両の制御装置において、駆動力配分比に基づいて前後輪のいずれか一方に発生させる駆動力もしくは制動力が0近傍となる場合に、駆動力発生機構とは別のブレーキ機構を制御して一方の車輪に所定の制動力を発生させるとともに、その所定の制動力を打ち消す駆動力を、当初の0近傍の駆動力もしくは制動力に加えて、駆動力発生機構を制御して一方の車輪に発生させる駆動力変更手段(ステップS5〜S7)を設けた。
(もっと読む)
車両用走行制御装置及びその方法
【課題】運転者のステアリング操作の意図と走行制御とを合致させる。
【解決手段】車両用走行制御装置は、操舵角θsを検出し(ステップS1)、検出し操舵角θsを基に、運転者による車両の横位置の変更の意図の有無を判定し(ステップS4)、運転者による車両の横位置の変更の意図有りと判定した場合、横位置の制御目標値を変更する(ステップS5)。
(もっと読む)
追従走行制御システム
【課題】 先導車両のジャークに起因した追従車両の乗り心地悪化を抑制することができる追従走行制御システムを提供する。
【解決手段】 追従走行制御システム1は、先導車両に搭載された送受信器5及びECU6を備えている。ECU6は、スロットル開度を設定するスロットル開度設定部8と、スロットル開度とエンジン回転数とに基づいて要求エンジントルクを設定する要求E/Gトルク設定部9と、送受信器5で受信された後続車情報を入力し、後続車情報に含まれる乗車状態に関する情報に基づいてエンジントルク変化率制限値を設定するE/Gトルク変化率設定部10と、エンジントルク変化率制限値を用いて要求エンジントルクにリミッタをかけることで最終要求エンジントルクを求め、この最終要求エンジントルクに応じてスロットルアクチュエータ15を制御する要求E/Gトルク補正部11とを有している。
(もっと読む)
自動車のペダル位置に関連する設定値を決定するシステム
本発明は、2個のセンサ(24、26)を具備する種類の自動車(10)においてペダル(22)の位置に関連する設定値を決定するためのシステムに関し、前記2個のセンサの各々が前記位置に関連する値を測定する。本システムは、ペダル(22)の所定の切換え位置の第1状態と第2状態との間で切り換えを行う手段(28)と、2個のセンサによる測定値と切換え手段の現在の状態とに基づいて設定値を生成する手段(60;70)とを具備する。本発明に従い、生成手段(60;70)は、切換え手段(28)第1状態にあるときの最小ペダル位置に対応する測定値と、切換え手段(28)第2状態にあるときの最大ペダル位置に対応する測定値とを選択することが可能である。  (もっと読む)
(もっと読む)
車両の旋回挙動制御装置
【課題】車両の加減速に応じて制御方向がUS抑制方向であってもOS抑制方向であっても制御量に対する要求ヨーモーメントの不感帯を適正なものとし、車両の走行性能を向上させつつ、ドライブフィールのよい車両の旋回挙動制御装置を提供する。
【解決手段】ヨー運動制御手段(43)により、要求ヨーモーメント設定手段によって設定された要求ヨーモーメントに応じて制動力調整手段を制御して車両のヨー運動を制御することになるが、ヨー運動制御手段は、要求ヨーモーメントの0値近傍に所定幅(US抑制側:DZus、OS抑制側:DZos)の不感帯を有しており、前後加減速GXが加速側に大きくなるほど該不感帯の所定幅を広げるようにする。
(もっと読む)
車両の挙動制御装置
【課題】制御量に対する制御指標の不感帯を適正なものとし、車両の挙動制御の向上を図った車両の挙動制御装置を提供する。
【解決手段】目標挙動設定手段により設定された目標挙動γtと挙動検出手段により検出された実挙動γrとの偏差の相関値Δγが制御指標とされ、挙動制御手段により挙動調整機構は該制御指標に応じて求めた制御量TR/Dに基づき制御されるが、該挙動制御手段は、制御指標の0値近傍に不感帯を有しており、該不感帯の所定幅|γDZ|を、車速VBが第1所定値V1未満の低車速域では該第1所定値V1以上第2所定値V2未満の中車速域よりも広く設定するとともに、車速VBが第2所定値V2以上の高車速域でも上記中車速域よりも広く設定する。
(もっと読む)
1 - 20 / 23
[ Back to top ]