
Fターム[3D246KA07]の内容
ブレーキシステム(制動力調整) (55,256) | 制御回路要素 (1,120) | 積分回路 (50)
Fターム[3D246KA07]に分類される特許
1 - 20 / 50
ブレーキ制御装置
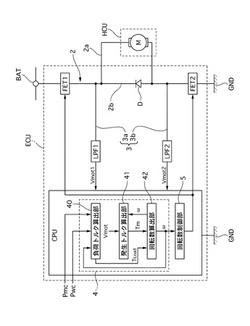
【課題】モータ回転数の推定誤差を低減することができる装置を提供すること。
【解決手段】モータMの端子間電圧VmotとモータMの特性に基づいてモータMの回転数を推定するモータ回転数推定部4を有するコントロールユニットCPUを備えた。ブレーキ回路内のブレーキ液を流動させるポンプPを回転駆動するモータMの回転数ωを推定する際、モータ端子間電圧VmotとモータMの特性(イナーシャIや容積効率η等の諸元、及びトルク−回転数特性)に基づいて推定する。
(もっと読む)
制動履歴データベース作成装置及び作成方法

【課題】車両における省燃費運転の精度を向上すること。
【解決手段】車両の位置情報を取得する位置情報取得部11と、車両の制動装置が作動していることを判定する制動判定部12と、を備え、位置情報取得部11が取得した位置情報とともに制動装置の制動履歴が格納されるデータベース21を作成する。制動履歴取得部15は、位置情報取得部11が取得した車両の位置情報に基づいて当該車両の進路上にある制動履歴などのデータをデータベース21から取得する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及び車両運動制御の両方について実行の要否を判定し優先順位の高い方の制御を選択する必要性や頻度を低減する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の前後力を制御することにより車両の旋回運動を安定化させる車両運動制御とを行う車両の走行制御装置。旋回補助制御の許可車速域は車両運動制御の許可車速域よりも低く設定されている。特に旋回補助制御の許可車速域の下限値は車両運動制御の許可車速域の下限値Vvscよりも低い。或いは旋回補助制御の許可車速域の上限値Vtaはオーバーステア抑制制御の許可車速域の下限値Vspよりも高いが、旋回補助制御の許可車速域の下限値はオーバーステア抑制制御の許可車速域の下限値Vspよりも低い。
(もっと読む)
ブレーキ制御装置
【課題】マスタシリンダと液圧ユニットを繋ぐ配管側と、液圧ユニットとホイルシリンダとを繋ぐ配管側とでは液圧剛性が異なるため、圧力変化に基づく演算に誤差が生じ、適切なベース圧が得られず、運転者に違和感を与えるという問題があった。運転者に違和感を与えることなくブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】ブレーキ制御装置において、ポンプの吐出流量に応じてマスタシリンダ圧を補正し、補正されたマスタシリンダ圧に基づいてホイルシリンダ圧を増減圧制御することとした。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作に基づき車両のエンジンを自動的に停止させる機能を有する車両において、制動制御を阻害することなくエンジンを速やかに再始動させることができる車両の制御装置及び車両の制御方法を提供する。
【解決手段】ブレーキ用ECUは、車輪に制動力が付与されない状態で走行する場合における車両の加速度の推定値として惰性加速度Dgを取得し(ステップS27)、該惰性加速度Dgに基づき第1車速推定値VS1を取得し(ステップS28)、取得した第1車速推定値VS1が制動制御許可基準値KVS未満である場合に(ステップS29:YES)、エンジンの再始動を許可する(ステップS30)。
(もっと読む)
制動制御装置
【課題】衝突形態に応じて最適な時間に亘って自動的に制動機構を作動させる。
【解決手段】自車両の衝突を検出する衝突検知センサ2a〜2dと、自車両の車速を検出する車速センサ4とを備え、制駆動力コントロールユニット12は、衝突検知センサ2a〜2dにより自車両の衝突が検出された場合に、当該衝突を検出した後に車速センサ4により検出された車速に基づいて、自動的に制動力を発生させる時間である自動制動時間を制御して、ブレーキ制御装置6を作動させる。
(もっと読む)
ソレノイド駆動制御装置
【課題】還流電流を流す還流回路のオープン故障を検出することが可能な簡単な構成のソレノイド駆動制御装置を提供する。
【解決手段】ソレノイド駆動制御装置は、電源BATによるソレノイドSOLへの電力供給経路LのうちソレノイドSOLのローサイド側を開通または遮断するスイッチング素子42bと、ソレノイドSOLおよびスイッチング素子42bの間にアノードが、電源BATおよびソレノイドSOLの間にカソードが接続され、スイッチング素子42bによる電力供給経路Lの遮断に伴う逆起電力を解消する還流ダイオード42aと、ソレノイドSOLのローサイド側とスイッチング素子42bとの接点電位を積分するローサイド積分回路43と、ローサイド積分回路43の出力信号であるローサイド積分信号に基づいて、還流ダイオード42aによるソレノイドSOLに対する並列回路45のオープン故障を検出する故障検出手段(CPU41)とを備えている。
(もっと読む)
車両運動制御装置及びプログラム
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
自動列車運転装置
【課題】電気ブレーキと空気ブレーキとの配分に応じて複雑な調整を必要とせず、且つ外乱にも強い自動列車運転装置を提供する。
【解決手段】列車の速度を検出する速度検出部31と、列車の走行位置を演算する位置演算部32と、列車の目標速度を規定する速度パターン生成部33と、速度パターンと列車速度に基づきノッチ指令ntを生成するノッチ制御部34と、ノッチ指令ntに基づき列車速度を減少させる電気ブレーキ及び空気ブレーキからなるブレーキ装置35と、ブレーキ装置35が発生する減速力を推定する減速力推定部(ブレーキモデル)37a及び列車の減速度を演算する減速度演算部(車体逆モデル)37bを有しており、これら減速力及び減速度に基づき外乱τd^を推定する外乱推定器37とを備え、減速力推定部は、電気ブレーキと空気ブレーキの動作状態に応じてブレーキ装置35のパラメータを調整する。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
車輪速センサの異常検出方法及び車両のスリップ制御方法
【課題】センサ取付位置による誤差や外来ノイズ等の影響を受けず、車輪速センサの異常を検出すること。
【解決手段】左右の駆動輪の車輪速センサによる平均回転速度を検出し、変速機内の回転センサによる車輪速換算値を検出し、平均回転速度と車輪速換算値との差を逐次時間積分して相対角を求める。車輪速センサと回転センサとの各取付部での相対角の許容値を設定し、時間積分で得られた相対角がこの許容値を越えた場合に車輪速センサの異常と判定する。
(もっと読む)
車両の停止制御装置及び車両の停止制御方法
【課題】液圧センサや加速度センサを用いずに、車両の走行する路面が登坂路であることを検出できる車両の停止制御装置及び車両の停止制御方法を提供する。
【解決手段】車両を停止させるための停止制御が開始されると(第1のタイミングt11)、目標減速度TDVSは、推定車体速度VSが低速になるにつれて次第に小さな値に設定される。そして、車輪に対する制動力は、車体減速度DVSから目標減速度TDVSを減算した減算値に基づき設定される。そして、減算値に応じた制動力が「0(零)」になった場合には、車両の走行する路面が登坂路であると判定される(第2のタイミングt12)。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
車両制御装置
【課題】スタック状態からの脱出を容易にする車両制御装置を提供すること。
【解決手段】ドライバによって切り換え可能な悪路制御モード切換スイッチによって、悪路制御モードに切り換えられると悪路制御を実行する悪路制御手段を設けた。悪路制御手段は、車輪の所定の制動力を与える制動力付与手段と、前記制動力付与手段により制動力が付与されている車輪に対して所定の駆動力を与える駆動力付与手段と、を備えたことを特徴とする車両制御装置。
(もっと読む)
居眠り判定装置及びプログラム並びに警報出力装置及びプログラム
【課題】短時間で正確に居眠りを判定する。
【解決手段】居眠り判定装置は、被験者の眼球位置を検出する眼球運動検出部21と、検出された被験者の眼球位置に基づいて、緩徐眼球運動を検出する緩徐眼球運動算出部26と、緩徐眼球運動が検出された場合に、前記被験者は居眠り状態であると判定する居眠り判定部34と、を備えている。
(もっと読む)
ソレノイドの電流推定方法,自動変速機制御装置およびブレーキ制御装置
【課題】電圧をオン,オフするハイサイドMOSFETと、電流還流用のローサイドMOSFETを備えるソレノイド電流制御装置において、ソレノイド駆動時と還流時の両電流を測定するために、ハイサイドMOSFETとローサイドMOSFETの両方に電流測定回路が必要となり、コストや発熱が増大する。
【解決手段】ハイサイドMOSFETがオンとなるオン期間1の電流最大値Imaxと、次に前記ハイサイドMOSFETがオンとなるオン期間2の電流最小値Iminを用いて、前記オン期間1と前記オン期間2の間にあるオフ期間の平均電流を、Imaxを初期値、Iminを最終値とする指数関数のオフ期間にわたる積分により算出する手段を備える。
【効果】低コスト,低損失かつ高精度な電流検出により、ソレノイド電流制御装置の低コスト化,小型化を実現する。
(もっと読む)
車両の軌道を変更するための方法及びシステム
この発明は、車両の軌道を変更するための方法に関し、該車両が、手動の操舵装置、少なくとも1対の接地部材、並びに手動操舵装置と接地部材との間の機械的相互接続を含み、車両の軌道が変更されるように、前記接地部材の少なくとも1つに制動力を付与すると同時に、機械的相互接続から生じる操舵装置外乱を抑制するステップを特徴とする。 (もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、停止距離に応じて適正な速度パターンを生成し、燃費の向上を可能とする。
【解決手段】目標走行経路に沿って速度パターンを生成し、この速度パターンに基づいて車両の走行を制御するように構成し、
目標走行経路に沿って速度パターンを生成し、この速度パターンに基づいて車両の走行を制御するように構成し、速度パターンにおいて車両の減速を行う第1減速パターンを生成する第1減速パターン生成手段と、第1減速パターンの継続期間がより長くなるように速度パターンを修正する減速パターン修正手段とを設ける。
(もっと読む)
路面摩擦係数推定装置
【課題】車両の所定のヨー軸周りのモーメントの推定値を用いて路面の摩擦係数の推定を行う場合に、路面の摩擦係数の推定値の信頼性や安定性をさらに向上させる。
【解決手段】車両1のヨー軸周りの外力モーメントの第1推定値Mz_estm_kを求める手段(S102〜S116,S118−4)と、第2推定値Mz_sens_kを求める手段(S118−3)と、偏差(Mz_sens_k−Mz_estm_k)を“0”に収束させるように路面摩擦係数の推定値の増減操作量Δμ_kを決定する手段(S118−6)とから成る基本処理手段31_kを複数備え、Δμ_kに応じて路面摩擦係数の推定値を更新する。基本処理手段31_kのそれぞれに対応するヨー軸は互いに異なる位置に設定される。
(もっと読む)
車両横滑り運動状態量推定装置
【課題】摩擦係数や車両の運動状態が変化する過渡期を含めて車両の横滑り運動の状態量の推定精度を高めることができる車両横滑り運動状態量推定装置を提供する。
【解決手段】車輪2−iと路面との間の摩擦特性モデルを含む車両モデルを用い、各車輪2−iの路面反力モデル値Fsubx_i_estm,Fsuby_i_estmを求めると共に横滑り運動状態量モデル値Vgy_predictを求める手段と、路面反力モデル値の合力によって車両の所定の位置(重心点の位置)に発生する横加速度モデル値Accy_estmと実横加速度検出手段15,22fの出力が示す横加速度検出値Accy_sensとの偏差Accy_errを求める手段と、偏差Accy_errをハイカット特性のフィルタ24d1に通した値を横滑り運動状態量モデル値に加えてなる値を横滑り運動状態量の推定値Vgy_estmとして決定する手段とを備える。
(もっと読む)
1 - 20 / 50
[ Back to top ]