
Fターム[3D246MA40]の内容
ブレーキシステム(制動力調整) (55,256) | 安全装置 (1,468) | 電波障害又はノイズ信号対策 (14)
Fターム[3D246MA40]に分類される特許
1 - 14 / 14
車両用制動力制御装置
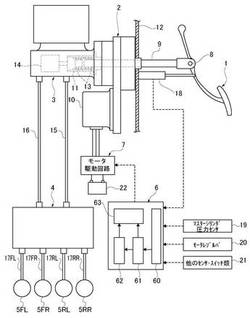
【課題】ブレーキペダルのペダルストローク量にノイズが混入したときであっても、ブレーキフィーリングの悪化を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、ストロークセンサ18と、マスターシリンダ圧力センサ19と、倍力装置指令値演算手段61と、平滑化処理手段63と、を備える。ストロークセンサ18で検出されたペダルストローク量と、マスターシリンダ圧力センサ19で検出されたマスターシリンダ圧力と、から倍力装置指令値演算手段61によって倍力装置指令値が演算されて、演算された倍力装置指令値に、平滑化処理手段63によって平滑化処理を施して、電動ブースタ2の動作量とする。
(もっと読む)
電子制御装置

【課題】回路基板からカバー部材に伝達された電気ノイズを効果的に低減し得る電子制御装置を提供する。
【解決手段】液圧制御機器類が設けられたアルミ合金製の液圧制御ブロック3と、液圧制御ブロックに被嵌したアルミ合金製のカバー部材4と、液圧制御ブロックとカバー部材との間に保持されて、前記液圧制御機器類を駆動する電子制御機構2と、を備えている。電子制御機構は、液圧制御機器類を駆動するパワー電子回路を有する合成樹脂材のバスバー構成体11と、該バスバー構成体11を介して前記液圧制御機器の駆動を制御する回路基板12とからなり、バスバー構成体を介して液圧制御ブロックとカバー部材とを電気的に接続する導電性の細長い板状のアース接続部材23を設けた。
(もっと読む)
磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置
【課題】磁気式回転角検出装置に外乱磁界が作用して回転角検出誤差を生じる状態を的確に判定すること。
【解決手段】回転軸52の回転に伴って回転変位する磁石54と、磁石54の回転面に平行な面上に互いに直交方向する軸線方向に沿って配置され、90度の回転位相をもって磁石54の磁気強度を検出する2個の磁気検出素子58、・60と、磁気検出素子58、60により検出される磁気強度を合成した合成ベクトルに基づいて回転軸52の回転角を算出する回転角算出部62とを備えた磁気式回転角検出装置において、前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超えれば、異常を判定する異常判定部64を設ける。
(もっと読む)
車両用制動装置
【課題】マスタシリンダ圧力を検出する圧力センサの零点補正値を適切に更新することができる車両用制動装置を提供する。
【解決手段】マスタシリンダ23により調整された液圧の圧力に対応する出力値を検出する油圧センサ40と、マスタシリンダ23の圧力が0となる油圧センサ40の出力値を零点補正値として記憶し、該零点補正値に基づいて油圧センサ40の出力値を補正してマスタシリンダ圧力を算出するマスタシリンダ圧力算出部52と、を備える車両用制動装置20において、油圧センサ40により検出された出力値が、マスタシリンダ圧力算出部52に記憶されている零点補正値より小さい場合に、該出力値を新たな零点補正値として設定し、零点補正値を更新する零点補正値更新部54を備える。
(もっと読む)
電気部品の組付方法
【課題】電気部品が静電気の影響を受けるのを防ぐとともに、電気部品の接続端子に汚れが付着するのを防ぐことができる組付方法を提供することを課題とする。
【解決手段】金属部品であるハウジング20と、ハウジング20に一部が内挿された樹脂部品である支持部21と、支持部21から突出したコンタクトプローブ30(接続端子)と、を備えた圧力センサ1(電気部品)を、金属部品である基体100に取り付ける方法であって、有底筒状の導電性部材であるキャップ部41を有する保護部材40を用意し、キャップ部41を支持部21に被せる段階と、ハウジング20を基体100に取り付ける段階と、を含み、支持部21に被せたキャップ部41がハウジング20に対して電気的に接続され、コンタクトプローブ30はキャップ部41から離間しており、キャップ部41に流れた静電気は、ハウジング20から基体100を介してアースされる。
(もっと読む)
車間距離検出装置および車速制御システム
【課題】超音波を用いた車間距離検出装置において、計測の精度を向上させる。
【解決手段】自車200の前部に設置され、先行車300に対して超音波Sを送信するとともに、先行車300で反射して戻った超音波S′を受信する超音波送受信機10と、超音波Sが超音波送受信機10から送信されてから、反射波としての超音波S′が受信されるまでの経過時間ΔTを計時する計時手段30および経過時間ΔTに基づいて先行車300との間の車間距離Lを算出する距離演算部50を有する距離算出装置20と、を備え、距離算出装置20は、反射波として受信した超音波S′のうち、路面(500)から反射して受信したノイズ成分(S2′)を除去するノイズ信号除去手段40を備え、距離演算部50は、ノイズ信号除去手段40によって除去された後の超音波S′についての経過時間ΔTに基づいて、車間距離Lを算出する。
(もっと読む)
電子制御ユニット及び車両挙動制御装置
【課題】センサ基板及び制御基板が収容されるハウジングを小型化することができ、全体をコンパクトに構成することができる電子制御ユニットを提供することを課題とする。
【解決手段】電子制御ユニット10であって、センサ33,34が取り付けられたセンサ基板30と、センサ33,34で検出された物理量に基づいて、電気部品の作動を制御する制御基板20と、センサ基板30及び制御基板20が収容されるハウジング40と、を備え、ハウジング40の内部空間には、電気部品を収容する第一収容室41と、センサ33,34を収容するセンサ収容部70と、が形成されるとともに、モータ200(電動部品)に給電するためのターミナルT(接続端子)が収容され、第一収容室41とセンサ収容部70とは、導電性を有する遮蔽部材72によって仕切られており、遮蔽部材72とモータ200とは、ターミナルTを介して電気的に接続されている。
(もっと読む)
車両挙動制御装置
【課題】ハードウェア的に細工することなく、ヨーレートセンサが共振出力した場合でも、車両の挙動制御への影響を小さく抑えることを課題とする。
【解決手段】本発明によれば、ヨーレートセンサ7に衝撃入力があってから、ヨーレートセンサ7の安定化が図られるまで、ヨーレートセンサ7からの検知信号の値を、ヨーレートセンサ7が安定であるときの所定値に置き換えて、車両1の挙動制御を行うための制御用ヨーレート信号として使用することで、ハードウェア的に細工することなく、ヨーレートセンサ7が共振出力した場合でも、車両1の挙動制御への影響を小さく抑えることができる。
(もっと読む)
車両の障害物検知装置
【課題】障害物検知手段による検知状態に応じて作動機器を制御する車両の障害物検知装置において、ノイズに起因する誤検出防止を図り、障害物検知の信頼性向上を図る。
【解決手段】ミリ波レーダ3で障害物検知し、障害物判定手段12が制御ユニット10内のメモリに記憶される情報に基づき、障害物が初めて検知された障害物か判定を行い(S3)、初めて検知された障害物で且つ障害物との距離が所定距離D以内である場合は(S4)、レーダ出力を1サンプリングタイムの間、所定レベル低下させて照射させる(S5)。受信信号の出力がレーダ出力の低下レベルと同レベル分低下している場合、近距離に障害物が実在すると判断されることから、S10に移行してPCS制御を開始する。レーダ出力の低下レベルと受信信号の出力とが対応していない場合は、電磁波ノイズによる障害物の誤検出と判定し(S8)、この障害物をPCS制御対象から除外する。
(もっと読む)
アンチスキッド制御装置
【課題】 ブレーキ非操作時におけるアンチスキッド制御の誤介入を防止し、運転者に与える違和感を低減したアンチスキッド制御装置を提供する。
【解決手段】 運転者のブレーキ操作を検出するブレーキスイッチと、モータ停止時の逆起電圧を検出する電圧検出手段とを有し、アンチスキッド制御手段は、ブレーキスイッチのOFF時にアンチスキッド制御を実行する場合、モータをONからOFFに切り換え、この切り換え時における逆起電圧が所定のしきい値よりも大きい場合、モータおよびソレノイドバルブの作動を停止するアンチスキッド誤介入防止制御を実行することとした。
(もっと読む)
ノイズフィルタを有するブレーキアクチュエータ
【課題】モータ内にチョークコイルを収容しなくても済み、かつ、電気ノイズ対策を確実に行えるブレーキアクチュエータを提供する。
【解決手段】チョークコイル9、10をハウジング8に形成した貫通穴8c内に配置する。このような構成とすれば、チョークコイル9、10をモータ4に内蔵する場合のように、モータ4の構造が変更されるたびにチョークコイル9、10の収容場所を設計し直さなくても済むし、モータ体格の大型化を招くこともない。また、チョークコイル9、10をECU基板2に直接実装する場合のように、貫通穴8cを通じて電気ノイズが漏れてくることも防止できる。
(もっと読む)
移動体の状態推定装置及び移動体の状態推定方法
【課題】移動体に搭載されたセンサに周期的な振動が伝達されたことに起因して該センサが出力した信号に周期的な変動が加わった場合であっても、一つのセンサに対する増幅回路を増加させることなく、センサからの信号に基づき移動体の状態を推定できる移動体の状態推定装置及び移動体の状態推定方法を提供する。
【解決手段】制御回路は、加速度センサから入力した加速度信号に基づき暫定加速度Gypを時系列的に演算する。そして、制御回路は、時系列的に演算した各暫定加速度Gypに基づく実波形から最小二乗法を用いて車両の横方向加速度Gyを演算し、演算結果に基づき車両状態を推定する。
(もっと読む)
車両制御装置
【課題】レーシングノイズが発生したか否かを正確に判定することにより、適切な車両制御を実現する。
【解決手段】ABS−ECU30において、レーシングノイズ判定部32は、所定の値以上の車速が検出されたか否かに基づいて、車両の振動によって実際よりも大きな車速が検出されるレーシングノイズが発生したか否かを判定する。車速演算部34は、レーシングノイズが発生したと判定された場合に、所定の閾値以上の速度を車速として算出し、算出した車速を、所定の閾値の車速が入力された場合に電動パワーステアリング機構22の作動を開始させるEPS−ECU40に出力する。
(もっと読む)
ブレーキ装置
【課題】
屈曲ケーブルのコストを低減し、安価なブレーキ装置を提供する。
【解決手段】
サスペンションを備える車両の車輪側に設置され、電気的に駆動されることにより制動力を発生するアクチュエータと、車両運動制御装置から制動力に関する信号を受信し、前記アクチュエータを駆動制御する駆動制御装置とを備えるブレーキ装置は、駆動制御装置は、アクチュエータ側に取付けられ、車両の車体側に設置される車両運動制御装置との通信を双方向の多重通信によって行う。ここで、駆動制御装置と車両運動制御装置を接続する信号線と、駆動制御装置へ電力を供給する電力線が、車体側と車輪側を接続する部分において、同一の外皮に覆われた1本のケーブルで構成されてもよい。又、ケーブルの電力線がツイストペア線、ケーブルの信号線が同軸線であってもよい。
(もっと読む)
1 - 14 / 14
[ Back to top ]